Делаем самого простого робота своими руками
Сделать самый простой робот под силу даже тем, кто только взял в руки паяльник.
Преимущественно наш робот (в зависимости от конструкции) будет бегать на свет либо наоборот убегать от него, бежать вперед в поисках луча света или же пятиться как крот назад.
Для нашего будущего «искусственного интеллекта» понадобятся:
- Микросхема L293D
- Маленький электромотор М1 (его можно вытащить из игрушечных автомобилей)
- Фототранзистор и резистор с номиналом 200 Ом.
- Провода, батарейка и, конечно же, сама платформа, где это все будет размещаться.
Если в конструкцию добавить еще парочку ярких светодиодов, то легко можно добиться, того, что робот просто будет бегать за рукой или даже следовать по светлой или темной линии. Наше создание будет типичным представителем роботов класса BEAM. Принцип поведения таких роботов заключается на «фоторецепции», то есть свет, в данном случае, будет выступать в качестве источника информации.
Наш робот будет двигаться вперед, при попадании на него луча света. Такое поведение устройства называется «фотокинезисом» – ненаправленное увеличение или уменьшение подвижности в ответ на изменение уровня освещенности.
В нашем устройстве, как было сказано выше, использовался фототранзистор n-p-n структуры – PTR-1 в качестве фотосенсора. Здесь можно использовать не только фототранзистор, но и фоторезистор или фотодиод, так как принцип работы у всех элементов одинаковый.

На рисунке сразу приведена монтажная схема робота. Если Вы еще не достаточно хорошо знакомы с техническими условными обозначениями, то, здесь исходя из этой схемы, несложно будет понять принципы обозначения и подсоединения элементов друг к другу.
GND. Провода, соединяющие различные элементы схемы с «землей» (отрицательный полюс источника питания), обычно на схемах не отображают полностью. Вместо этого рисуют маленькую черточку, обозначающую соединение с «землей». Иногда, рядом с черточкой пишут «GND» – от анг. слова «ground» – земля.
Vcc. Данное обозначение показывает, что через эту часть схема соединена с источником питания – Положительный полюс! Иногда на схемах вместо этих букв часто пишут номинал тока. В данном случае +5V.
Принцип действия робота.
При попадании на фототранзистор (на схеме он указан как PRT1) луча света, на выходе микросхемы INPUT1 появляется положительный сигнал, который заставляет мотор М1 – работать. И наоборот, когда луч света перестает освещать фототранзистор – сигнал на выходе микросхемы INPUT1 исчезает, следовательно, и мотор останавливается.
Резистор R1 в данной схеме предназначен компенсации, проходящего тока через фототранзистор. Номинал резистора 200 Ом – конечно можно сюда припаять резисторы и с другими показателями номиналов, но следует помнить, что от номинала будет зависеть чувствительность фототранзистора, а значит и работоспособность самого робота.
Если номинал резистора будет большим, то робот станет реагировать только на очень яркий луч света, а если небольшим – то и чувствительность будет намного выше.
Коротко говоря – не следует использовать в данной схеме резисторы с сопротивлением менее 100 Ом, иначе фототранзистор может просто-напросто перегреться и выйти из строя.
В общем, пища для размышления вам дана. Обратите внимание на схему самой микросхемы. Здесь четко изображены все входы и выходы сигналов. Комбинируя способы подключения моторчика и фоторезистора, вы легко можете изменять поведение этого робота. Более подробно о роботах можно узнать у нашего друга modelist-konstruktor.com
volt-index.ru
Как сделать робота, Робот своими руками, Самодельные роботы
 Любители электроники, люди интересующиеся робототехникой не упускают возможность самостоятельно сконструировать простого или сложного робота, насладиться самим процессом сборки и результатом.
Любители электроники, люди интересующиеся робототехникой не упускают возможность самостоятельно сконструировать простого или сложного робота, насладиться самим процессом сборки и результатом.
 Не всегда есть время и желание на уборку дома, но современные технологию позволяют создавать роботов уборщиков. К таковым можно отнести робота пылесоса, который ездит часами по комнатам и собирает пыль.
Не всегда есть время и желание на уборку дома, но современные технологию позволяют создавать роботов уборщиков. К таковым можно отнести робота пылесоса, который ездит часами по комнатам и собирает пыль.
 С чего начать если возникло желание создать робота своими руками? Конечно же первые роботы должны быть просты в создании. Робот, о котором пойдет речь в сегодняшней статье, не займет много времени и не требует особых навыков.
С чего начать если возникло желание создать робота своими руками? Конечно же первые роботы должны быть просты в создании. Робот, о котором пойдет речь в сегодняшней статье, не займет много времени и не требует особых навыков.
 Разнообразие роботов не ограничивается конкретными шаблонами, по которым эти роботы создаются. Людям постоянно приходят в голову оригинальные интересные идеи, как сделать робота. Одни создают статичные скульптуры роботов, другие создают динамичные скульптуры роботов, о чем и пойдет речь в сегодняшней статье.
Разнообразие роботов не ограничивается конкретными шаблонами, по которым эти роботы создаются. Людям постоянно приходят в голову оригинальные интересные идеи, как сделать робота. Одни создают статичные скульптуры роботов, другие создают динамичные скульптуры роботов, о чем и пойдет речь в сегодняшней статье.
 Думаю многие видели рекламу одного из известных браузеров, в которой простенький робот крутясь рисовал цветными фломастерами неразборчивые фигуры. Предлагаю вам попробовать сделать подобного робота своими руками. На создание робота уйдет не так много времени и усилий.
Думаю многие видели рекламу одного из известных браузеров, в которой простенький робот крутясь рисовал цветными фломастерами неразборчивые фигуры. Предлагаю вам попробовать сделать подобного робота своими руками. На создание робота уйдет не так много времени и усилий.
Порой идеи создания робота приходят совсем неожиданно. Если поразмышлять на тему, как заставить робота из подручных средств двигаться, возникает мысль о батарейках. Но, что если всё гораздо проще и доступнее? Давайте попробуем сделать робота своими руками используя мобильный телефон в качестве основной детали. Для создания вибро робота своими руками понадобятся следующие материалы:
Создать робота своими руками можно из чего угодно. К примеру, робот Belvedere, автором которого является Andrew Wolff, сделан на основе робота пылесоса. Основное применение робота заключается в том, чтобы робот развлекал семью Andrew и гостей.
timerobots.ru
Полезные ресурсы для создания робота своими руками
Чтобы создать своего робота, необязательно получать высшее образование по профильной специальности или читать массу литературы по роботостроению. Достаточно воспользоваться пошаговой инструкцией, которую предлагают мастера робототехники на своих сайтах. В Интернете можно найти много полезной информации, посвящённой разработке автономных роботизированных систем.
10 ресурсов для начинающего робототехника
1. Самодельный робот
Информация на сайте позволяет самостоятельно создать робота со сложным поведением. Здесь можно найти примеры программ, схемы, справочные материалы, готовые примеры, статьи и фотографии.
2. RoboZone
Новичкам на сайте посвящён отдельный раздел. Создатели ресурса делают немалый упор на микроконтроллеры, разработку универсальных плат для робототехники и пайку микросхем. Здесь также можно найти исходные коды программ и множество статей с практическими советами.
3. myRobot
На сайте есть специальный курс «Шаг за шагом», в котором детально описан процесс создания простейших BEAM-роботов, а также автоматизированных систем на основе микроконтроллеров AVR.
4. Железный Феликс
Сайт, где начинающие создатели роботов смогут найти всю необходимую теоретическую и практическую информацию. Здесь также размещается большое количество полезных тематических статей, обновляются новости и можно задать вопрос опытным робототехникам на форуме.
5. Робототехника
Данный ресурс посвящён постепенному погружению в мир сотворения роботов. Начинается всё с познания Arduino, после чего начинающему разработчику рассказывают о микроконтроллерах AVR и более современных аналогах ARM. Подробные описания и схемы очень доступно объясняют, как и что делать.
6. BEAM-робот
Сайт о том, как сделать BEAM-робота своими руками. Здесь есть целый раздел, посвящённый основам, также приведены логические схемы, примеры и т. д.
7. Servo-Droid
На этом ресурсе очень доходчиво расписано, как самостоятельно создать робота, с чего начать, что нужно знать, где искать информацию и необходимые детали. Сервис также содержит раздел с блогом, форумом и новостями.
8. Робофорум
Огромнейший живой форум, посвящённый созданию роботов. Здесь открыты темы для новичков, рассматриваются интересные проекты и идеи, описываются микроконтроллеры, готовые модули, электроника и механика. А главное – можно задать любой вопрос по роботостроению и получить развёрнутый ответ от профессионалов.
9. Блог «Роботы и робототехника»
Ресурс робототехника-любителя посвящён в первую очередь его собственному проекту «Самодельный робот». Однако здесь можно найти очень много полезных тематических статей, ссылок на интересные сайты, узнать о достижениях автора и обсудить различные конструкторские решения.
10. Arduino
Аппаратная платформа Arduino является наиболее удобной для разработки роботизированных систем. Информация сайта позволяет быстро разобраться в этой среде, освоить язык программирования и создать несколько несложных проектов.
robo-hunter.com
Как сделать робота своими руками
 Сегодня мы расскажем, как сделать робота из подручных средств. Получившийся «высокотехнологичный андроид» хоть и будет небольшого размера и навряд ли сможет помочь вам по хозяйству, но пренепременно развеселит как детей, так и взрослых.
Сегодня мы расскажем, как сделать робота из подручных средств. Получившийся «высокотехнологичный андроид» хоть и будет небольшого размера и навряд ли сможет помочь вам по хозяйству, но пренепременно развеселит как детей, так и взрослых.Необходимые материалы
Для того, чтобы сделать робота своими руками, не понадобится знание ядерной физики. Это можно сделать и в домашних условиях из обычных материалов, которые постоянно есть под руками. Итак, что нам понадобится:- 2 куска провода
- 1 моторчик
- 1 батарейка AA
- 3 канцелярские кнопки
- 2 кусочка пенокартона или похожего по свойствам материала
- 2-3 головки старых зубных щеток или несколько скрепок

1. Прикрепляем батарейку к мотору
С помощью клеящего пистолета прикрепляем кусочек пенокартона к корпусу мотора. Затем к приклеиваем к нему батарейку.
2. Дестабилизатор
Этот шаг может показаться не совсем понятным. Однако, чтобы сделать робота, необходимо заставить его двигаться. Надеваем на ось мотора маленький продолговатый кусочек пенокартона и закрепляем его с помощью клеевого пистолета. Такая конструкция придаст мотору дисбаланс, что и приведет всего робота в движение.
На самый конец дестабилизатора капните пару капель клея, или прикрепите какой-нибудь декоративный элемент — это добавит нашему творению индивидуальности и увеличит амплитуду его движений.

3. Ноги
Теперь необходимо снабдить робота нижними конечностями. Если вы будете использовать для этого головки зубных щеток, то приклейте их к нижней части мотора. В качестве прослойки можно использовать всё тот же пенокартон.
4. Провода
Следующим шагом прикрепим два наших отрезка провода к контактам моторчика. Можно их просто прикрутить, но ещё лучше будет припаять их, это сделает робота более долговечным.
5. Подключение батарейки
Используя термопистолет, приклеем провод к одному из концов батареи. Можете выбрать любой из двух проводов и любую сторону батареи — полярность в данном случае роли не играет. Если у вас хорошо получается паять, в этом шаге также можно воспользоваться пайкой вместо клея.
6. Глаза
В качестве глаз робота вполне подойдет пара бусинок, которые прикрепляем термоклеем к одному из концов батарейки. На этом шаге можно проявить фантазию и придумать внешний вид глаз на своё усмотрение.
7. Запуск
Теперь давайте оживим нашу самоделку. Возьмите свободный конец провода и прикрепите его с незанятому контакту батареи с помощью липкой ленты. Не стоит использовать на этом шаге термоклей, потому что это не позволит вам при необходимости отключить мотор.
Робот готов!
А вот как может выглядеть наш самодельный робот, если проявить больше фантазии:
И напоследок видеоролик:
www.techcult.ru
Десятка самодельных роботов — Robotoved
Обычно мы рассказываем о роботах, созданных различными научно-исследовательскими центрами или компаниями. Однако роботов с разной степенью успеха по всему миру собирают обычные люди. Итак, сегодня мы представляем вам десять самодельных роботов.
Адам
Немецкий студент-нейробиолог собрал андроида по имени Адам. Его имя расшифровывается как Advanced Dual Arm Manipulator или «усовершенствованный двуручный манипулятор». Руки робота обладают пятью степенями свободы. Их приводят в действие суставы Robolink немецкой компании Igus. Для вращения суставов Адама используются внешние тросы. Кроме того, на голове Адама установлено две видеокамеры, громкоговоритель, синтезатор речи, а также ЖК-панель, имитирующая движения губ робота.
MPR-1
Робот MPR-1 примечателен тем, что он сконструирован не из железа или пластика, как большинство его собратьев, а из бумаги. Как утверждает создатель робота художник Kikousya, материалы для MPR-1 – бумага, несколько дюбелей и пара резиновых лент. При этом робот уверенно двигается, хотя его механические элементы также сделаны из бумаги. Кривошипно-шатунный механизм обеспечивает движение ног робота, а его ступни созданы так, что их поверхность всегда находится параллельно полу.
Робот-папарацци Boxie
Робот Boxie создан американским инженером Александром Ребеном из Массачусетского технологического института. Boxie, похожий чем-то на героя известного всем мультфильма Валл-И, должен помочь сотрудникам средств массовой информации. Маленький и юркий папарацци полностью сделан из картона, передвигается он при помощи гусениц, а ориентируется на улице посредством ультразвука, что помогает ему преодолевать разнообразные препятствия. Интервью робот берет забавным детским голосом, а респондент в любой момент может прервать беседу, нажав на специальную кнопку. Boxie может записать около шести часов видео и отправить снятое своему хозяину, используя ближайшую точку Wi-Fi.
Китайский робот-журналист написал статью за одну секунду
Morphex
Норвежский инженер Каре Халворсен создал шестиногого робота Morphex, который умеет превращаться в мяч и обратно. Кроме того, робот способен передвигаться. Движение робота происходит за счет двигателей, толкающих его вперед. Робот движется по дуге, а не по прямой линии. В силу своего дизайна Morphex не может самостоятельно исправить траекторию своего движения. В данный момент Халворсен работает над тем, чтобы решить данный вопрос. Ожидается любопытное обновление: создатель робота хочет добавить 36 светодиодов, которые позволили бы Morphex менять цвета.
Truckbot
Американцы Тим Хис и Райан Хикмен решили создать небольшого робота, в основе которого находится телефон Android. Созданный ими робот Truckbot довольно прост в плане его конструкции: телефон HTC G1 находится на верхушке робота, являясь его «мозгом». На данный момент робот умеет передвигаться по плоской поверхности, выбирать направления движения и сопровождать всяческими фразами столкновения с препятствиями.
Робот-пайщик
Однажды американец Брайан Дори, занимающийся разработкой плат расширения, столкнулся со следующей проблемой: запаивать двухрядную гребенку пинов своими руками очень сложно. Брайану был необходим помощник, поэтому он решил создать робота, который умел бы паять. На разработку робота у Брайана ушло два месяца. Сделанный робот оборудован двумя паяльниками, которые могут запаивать два ряда контактов одновременно. Управлять роботом можно через ПК и планшет.
Mechatronic Tank
В каждой семье есть своё излюбленное хобби. Например, в семье американского инженера Роберта Битти конструируют роботов. Роберту помогают его дочери-подростки, а супруга и новорожденная дочь оказывают им моральную поддержку. Наиболее внушительное их творение – самоходная установка Mechatronic Tank. Благодаря 20-килограммовой броне этот робот-охранник – гроза любого преступника. Восемь эхолокаторов, установленных на башне робота, позволяют ему рассчитать дистанцию до объектов, находящихся в его поле зрения, с точностью до дюйма. Робот ещё стреляет металлическими пулями со скоростью в тысячу выстрелов в минуту.
Робособака
Американец по имени Макс создал мини-копию знаменитого робота-собаки от Boston Dynamics. Несущую конструкцию робота Макс сделал из обрезков пятимиллиметрового акрилового стекла, а для скрепления всех частей воедино им были использованы обычные резьбовые болты. Кроме того, при создании робота были использованы миниатюрные сервоприводы, отвечающие за движение его конечностей, а также детали из набора Arduino Mega, координирующие двигательный процесс механического пса.
Робот-шар
Робот-колобок был сконструирован Джеромом Демерсом, работает он на солнечных батареях. Внутри робота есть конденсатор, который соединен с деталями питания от солнца. Он нужен для накапливания энергии в непогоду. Когда солнечной энергии достаточно, шар начинает катиться вперед.
Роборука
Изначально преподавателем Технологического института Джорджии Джилом Вайнбергом была сконструирована роборука для барабанщика, которому ампутировали руку. Затем Джил создал автоматизированную технологию синхронизации, благодаря которой двурукий барабанщик мог бы пользоваться роборукой в качестве дополнительной руки. Роборука реагирует на манеру игры барабанщика, создавая свой собственный ритм. Также роборука умеет импровизировать, анализируя при этом ритм, в котором играет барабанщик.
robotoved.ru
Простейший робот своими руками
Сделать робота можно, используя лишь одну микросхему драйвера моторов и пару фотоэлементов. В зависимости от способа соединения моторов, микросхемы и фотоэлементов робот будет двигаться на свет или, наоборот, прятаться в темноту, бежать вперед в поисках света или пятиться, как крот, назад. Если добавить в схему робота пару ярких светодиодов, то можно добиться, чтобы он бегал за рукой и даже следовал по темной или светлой линии.

Принцип поведения робота основывается на “фоторецепции” и является типичным для целого класса BEAM-роботов. В живой природе, которой будет подражать наш робот, фоторецепция – одно из основных фотобиологических явлений, в котором свет выступает как источник информации.
В качестве первого опыта обратимся к устройству BEAM-робота, двигающегося вперед, когда на него падает луч света, и останавливающегося, когда свет перестает его освещать. Поведение такого робота называется фотокинезисом – ненаправленным увеличением или уменьшением подвижности в ответ на изменения уровня освещённости.
В устройстве робота, кроме микросхемы драйвера моторов L293D, будет использоваться только один фотоэлемент и один электромотор. В качестве фотоэлемента можно применить не только фототранзистор, но и фотодиод или фоторезистор.
В конструкции робота мы используем фототранзистор n-p-n структуры в качестве фотосенсора. Фототранзисторы на сегодняшний день являются, пожалуй, одним из самых распространенных видов оптоэлектронных приборов и отличаются хорошей чувствительностью и вполне приемлемой ценой.

Схема робота с одним фототранзистором
На рисунке приведены монтажная и принципиальная схемы робота, и если Вы еще не очень хорошо знакомы с условными обозначениями, то, исходя из двух схем, несложно понять принцип обозначения и соединения элементов. Провод, соединяющий различные части схемы с “землей” (отрицательным полюсом источника питания), обычно не изображают полностью, а на схеме рисуют небольшую черточку, обозначающую, что это место соединяется с “землей”. Иногда рядом с такой черточкой пишут три буквы “GND”, что означает “землю” (ground). Vcc обозначает соединение с положительным полюсом источника питания. Вместо букв Vcc часто пишут +5V, показывая тем самым напряжение источника питания.
У фототранзистора эмиттер
(на схеме со стрелкой)
длиннее коллектора.
Принцип действия схемы робота очень простой. Когда на фототранзистор PTR1 упадет луч света, то на входе INPUT1 микросхемы драйвера двигателей появится положительный сигнал и мотор M1 начнет вращаться. Когда фототранзистор перестанут освещать, сигнал на входе INPUT1 исчезнет, мотор перестанет вращаться и робот остановится.
Чтобы скомпенсировать проходящий через фототранзистор ток, в схему введен резистор R1, номинал которого можно выбрать около 200 Ом. От номинала резистора R1 будет зависеть не только нормальная работа фототранзистора, но и чувствительность робота. Если сопротивление резистора будет большим, то робот будет реагировать только на очень яркий свет, если – небольшим, то чувствительность будет более высокой. В любом случае не следует использовать резистор с сопротивлением менее 100 Ом, чтобы предохранить фототранзистор от перегрева и выхода из строя.

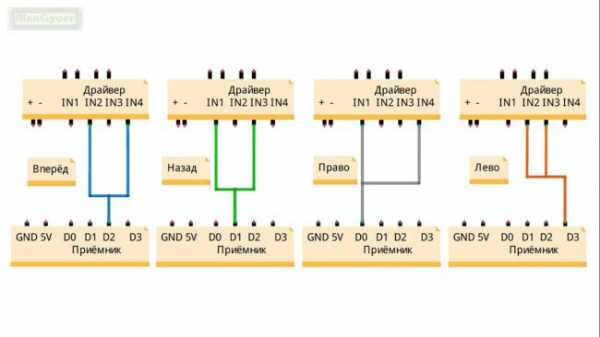
Сделать робота, реализующего реакцию фототаксиса (направленного движения к свету или от света), можно с использованием двух фотосенсоров.
Когда на один из фотосенсоров такого робота попадает свет, включается соответствующий сенсору электромотор и робот поворачивает в сторону света до тех пор, пока свет не осветит оба фотосенсора и не включится второй мотор. Когда оба сенсора освещены, робот движется навстречу источнику света. Если один из сенсоров перестает освещаться, то робот снова поворачивает в сторону источника света и, достигнув положения, при котором свет падает на оба сенсора, продолжает свое движение на свет. Если свет перестает падать на фотосенсоры, робот останавливается.
Принципиальная схема робота с двумя фототранзисторами
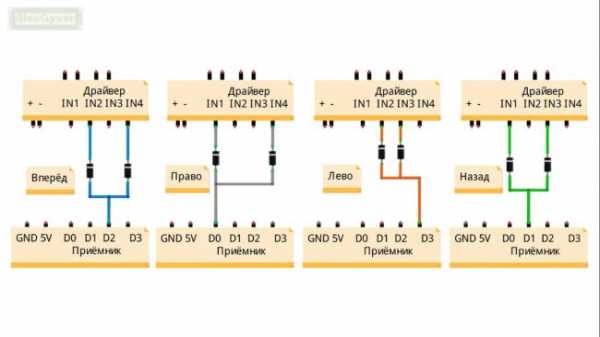
Схема робота симметричная и состоит из двух частей, каждая из которых управляет соответствующим электромотором. По сути, она является как бы удвоенной схемой предыдущего робота. Фотосенсоры следует располагать крест-накрест по отношению к электромоторам так, как показано на рисунке робота выше. Также можно расположить моторы крест-накрест относительно фотосенсоров так, как показано на монтажной схеме ниже.

Монтажная схема простейшего робота с двумя фототранзисторами
Если мы расположим сенсоры в соответствии с левым рисунком, то робот будет избегать источников света и его реакции будут похожи на поведение крота, прячущегося от света.
Сделать поведение робота более живым можно, подав на входы INPUT2 и INPUT3 положительный сигнал (подключить их к плюсу источника питания): робот будет двигаться при отсутствии падающего на фотосенсоры света, а “увидев” свет, будет поворачивать в сторону его источника.
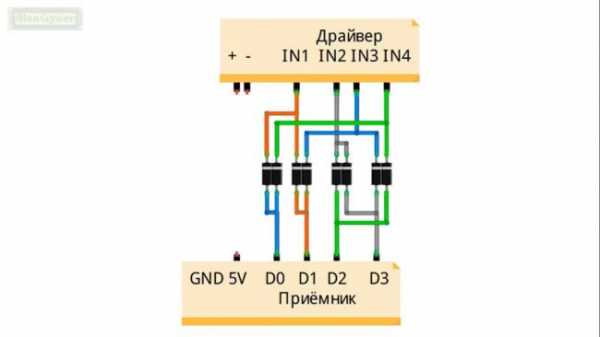
Чтобы сделать робота, “бегающего” за рукой, нам понадобятся два ярких светодиода (на схеме LED1 и LED2). Подключим их через резисторы R1 и R4, чтобы скомпенсировать протекающий через них ток и предохранить от выхода из строя. Расположим светодиоды рядом с фотосенсорами, направив их свет в ту же сторону, в которую ориентированы фотосенсоры, и уберем сигнал с входов INPUT2 и INPUT3.

Схема робота, движущегося на отраженный свет
Задача получившегося робота – реагировать на отраженный свет, который излучают светодиоды. Включим робота и поставим ладонь перед одним из фотосенсоров. Робот повернет в сторону ладони. Переместим ладонь немного в сторону так, чтобы она скрылась из поля “зрения” одного из фотосенсоров, в ответ робот послушно, как собачка, повернет за ладонью.
Светодиоды следует подбирать достаточно яркие, чтобы отраженный свет устойчиво улавливался фототранзисторами. Хороших результатов можно достичь при использовании красных или оранжевых светодиодов с яркостью более 1000 мКд.
Если робот реагирует на вашу руку только тогда, когда она почти касается фотосенсора, то можно попробовать поэкспериментировать с листочком белой бумаги: отражающие способности белого листа намного выше, чем у человеческой руки, и реакция робота на белый листок будет намного лучше и устойчивее.
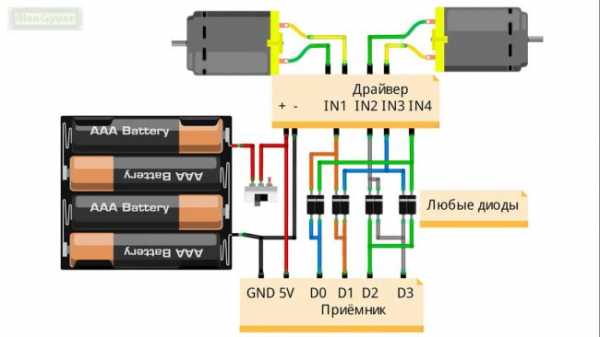
Белый цвет обладает самыми высокими отражающими свойствами, черный – наименьшими. Основываясь на этом, можно сделать робота, следующего по линии. Сенсоры при этом следует расположить так, чтобы они были направлены вниз. Расстояние между сенсорами должно быть немного больше, чем ширина линии.

Cхема робота, следующего по черной линии, идентична предыдущей. Чтобы робот не терял черную линию, нарисованную на белом поле, ее ширина должна быть около 30 мм или шире. Алгоритм поведения робота достаточно прост. Когда оба фотосенсора улавливают отраженный от белого поля свет, робот движется вперед. Когда один из сеносоров заезжает на черную линию, соответствующий электромотор останавливается и робот начинает поворачиваться, выравнивая свое положение. После того как оба сенсора снова находятся над белым полем, робот продолжает свое движение вперед.
Примечание:
На всех рисунках роботов микросхема драйвера двигателей L293D показана условно (только управляющие входы и выходы).
Понравился наш сайт? Присоединяйтесь или подпишитесь (на почту будут приходить уведомления о новых темах) на наш канал в МирТесен!
nig.mirtesen.ru
МАЛЕНЬКИЙ САМОДЕЛЬНЫЙ РОБОТ
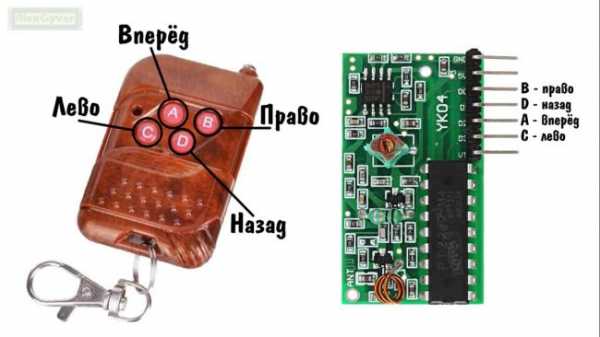
От обычных неподвижных фигурок, собранных из радиодеталей, решил плавно перейти к динамичным движущимся моделям. Это проект маленького самодельного робота на ИК-управлении, собранного из простых и доступных для приобретения деталей. В основе – два микроконтроллера. Передачу с пульта ДУ обеспечивает PIC12F675, а приёмная часть к контроллером моторчиков реализована на PIC12F629.
Схема ИК передатчика для робота
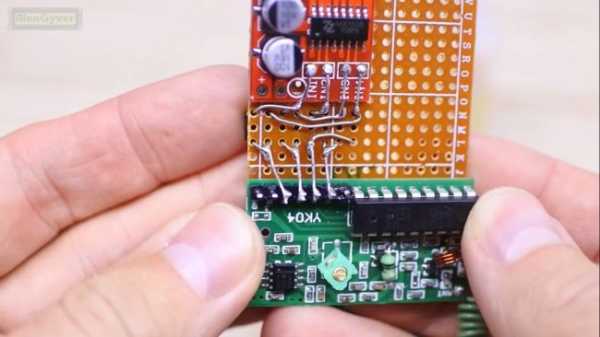
Схема робота на микроконтроллере
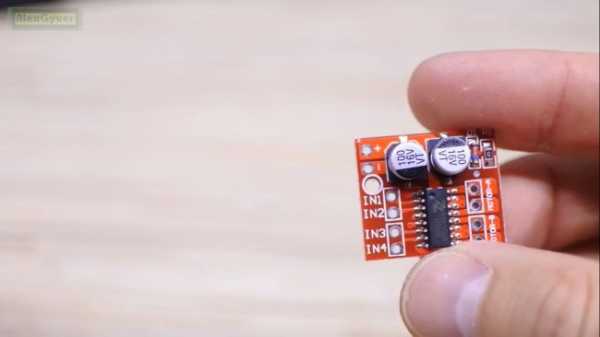
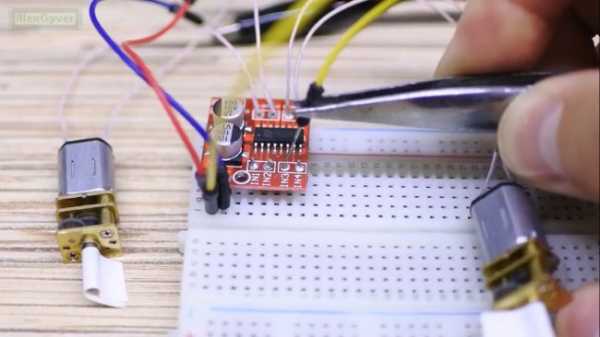
С цифровой частью всё вышло гладко, проблема была только в “двигательной установке” – маленьких редукторах, которые сделать в домашних условиях очень проблематично, поэтому пришлось развить идею “виброжуков“. Управление микромоторами осуществляется через усилительные транзисторные ключи на BC337. Они заменимы на любые другие небольшие транзисторы n-p-n с током коллектора от 0,5 А.
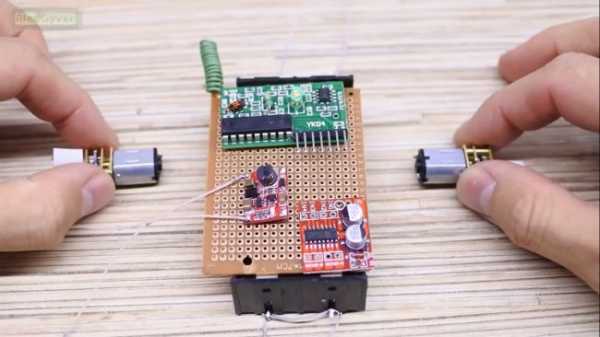
Размеры получились очень маленькие – на фото сравнение его с монетой и ещё возле спичечного коробка. Глаза робота сделаны из сверхярких светодиодов, засунутых в корпус небольших электролитических конденсаторов.

Что касается прошивки – это была одна их первых моих программ, так что код там “так себе”. Если захотите повторить конструкцию, то его желательно переписать.

Видеоролик про самодельного робота
В общем получилась такая себе миниатюрная дистанционно управляемая игрушка. Для демонстрации можно сначала просто его показать без движения, а потом неожиданно активировать пультом и заставить двигаться 🙂 О других электронных поделках вы можете узнать зайдя на форум – в первом сообщении есть список всех работ. Надеюсь идея вам понравилась, с вами был ukrnano.
Форум по электронным самоделкам
Обсудить статью МАЛЕНЬКИЙ САМОДЕЛЬНЫЙ РОБОТ
radioskot.ru