Как сделать первые шаги в робототехнике? / Mail.ru Group corporate blog / Habr
Роботизация и автоматизация становятся всё востребованнее, и многим хотелось бы научиться создавать подобные системы и устройства. Но с чего начать, как освоить азы? Мы сделали для вас небольшую подборку русскоязычных и англоязычных YouTube-каналов с учебными материалами и методическими пособиями по робототехнике.
Канал ведет инженер, который рассказывает о своем опыте в конструировании из подручных материалов разных устройств, как правило автоматизированных. Речь идет об электронике, робототехнике, инструментах и прикладных экспериментах. Довольно интересный и доступно изложенный материал, из которого можно почерпнуть для себя что-то новое.
Канал довольно популярного магазина «Амперка». Посвящен электронике и робототехнике. Здесь рассказывается о платформах Arduino, Raspberry Pi и Iskra JS, с помощью которых можно создавать роботов и автоматизированные системы (типа «умный дом») даже с минимальным набором знаний.
Интересный канал, позволяющий получить множество знаний в разных областях от ведущих вузов. В том числе содержит вводные материалы лекций по робототехнике, к которым можно получить доступ в рамках проекта «Универсариум».
На канале представлены доступные уроки по робототехнике, программированию, а также интересные материалы и освещение событий, связанных с роботами. Автор — кандидат физико-математических наук и тренер сборной России по робототехнике.
Содержит учебные материалы по робототехнике для начинающих. Создание робота своими руками с нуля. От простейших экземпляров до вычислительных машин на процессорах и микроконтроллерах. Каждый материал содержит описание робота, инструкция по его созданию и список необходимых элементов.
На канале вы найдёте обучающие уроки по робототехнике, в частности, по программированию EV3. Первый сезон лекций выложен полностью. Материал подан доступно для начинающих. Планируется 3 сезона.
На канале есть множество интересной и полезной информации по созданию роботов, материалы с места событий, выставок и чемпионатов, а также обучающие материалы, в том числе практические задания к курсу по робототехнике.
Ряд довольно интересных обучающих и обозревательных материалов по робототехнике от сотрудника Оренбургского президентского кадетского колледжа. Здесь вы можете получить начальные знания, которые пригодятся любому человеку, интересующемуся робототехникой.
Уроки по робототехнике для начинающих, и не только для детей. Пошаговые доступные инструкции по сборке роботов из LEGO, на основе Arduino и т.д. Содержит также много других интересных материалов по теме.
Обучающие материалы по робототехнике, а также видео и новинки из этой области. Автор имеет несколько наград и патентов в этой сфере. Преподает свой собственный курс «Как стать инженером робототехники» для студентов и аспирантов.
Очень интересный курс лекций по робототехнике — не для новичков. Охватывает многие интересные аспекты и содержит множество материалов в виде лекций из этой и смежных областей.
Серия обучающих уроков по платформе Arduino. Довольно интересное и несложное изложение материала. Уроки подходят для новичков.
Серия обучающих материалов по Arduino и базовому программированию для новичков. Поможет делающим первые шаги познакомиться с платформой и обучиться азам.
Обучающие уроки по электронике, робототехнике на основе Arduino и многое другое. Содержащие интересные материалы из категории «сделай сам».
Сборник лекций с говорящим названием от Стэндфордского университета. Не для начинающих.
* * *
Хотя сегодня многие интересуются робототехникой, однако полезных обучающих видео в сети на удивление немного. Так что делитесь в комментариях ссылками для дополнения подборки.
habr.com
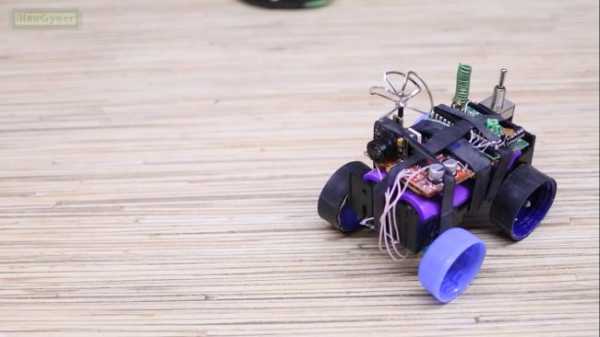
Простой робот шпион своими руками
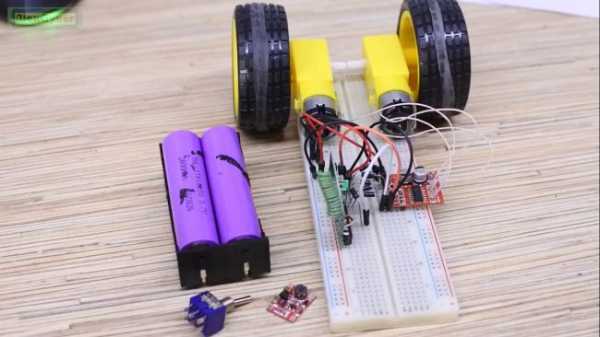
Сегодня мы с вами сделаем маленькую машинку на радиоуправлении причем не просто машинку, а самый настоящий шпионский девайс.

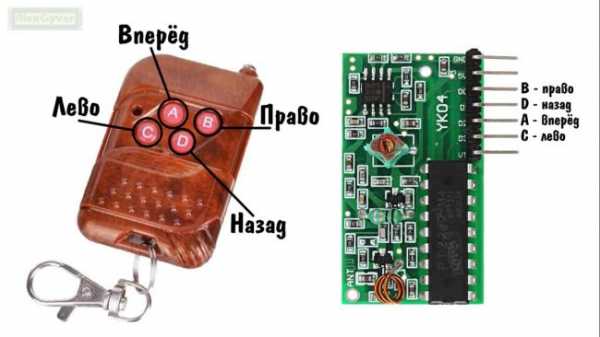
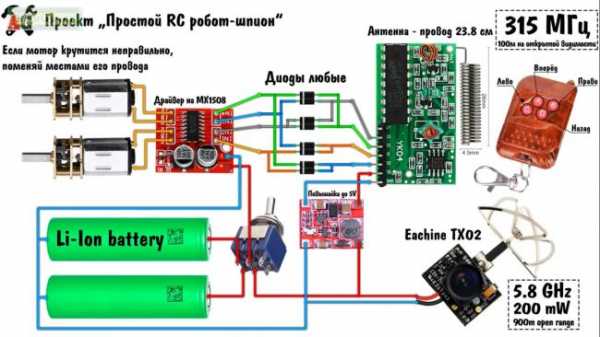
Автором данной самоделки является AlexGyver. Итак, давайте начнем. Значит смотрите, есть вот такой модуль передатчика на 315 МГц в виде пульта на четыре кнопки и к нему приемник с четырьмя логическими выходами под каждую кнопку.
Работает это все весьма очевидным образом: кнопку нажали 5 вольт на соответствующем выходе получили. Уже хороший потенциал для arduino проектов. Также есть драйвер для 2-ух моторчиков на микросхеме mx1508.
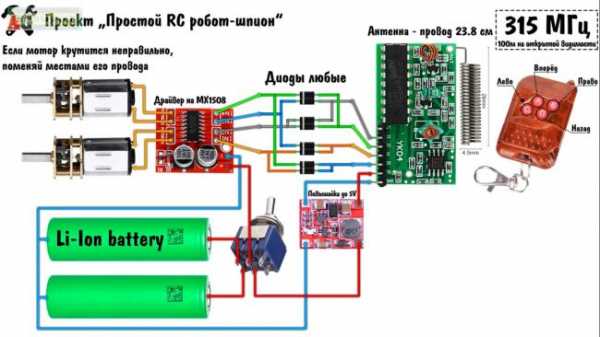
Пульт и приёмник
Драйвер моторов
Диоды 1N4004
Моторчик мини (200 RPM)
Моторчик большой
Повышайка до 5В
Аккумуляторы 18650
Батарейный отсек (2x)
Тумблер
Макетка
Танковое шасси
FPV:
Камера 3 в 1
FPV часы
Крутой дисплей
Менее крутой
FPV OTG приёмник
FPV шлем
FPV очки
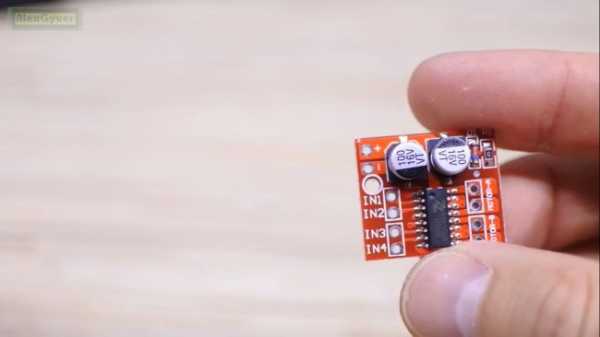
Это современный практически аналог старому хромому l298. С ним тоже все очень просто, подключаем 2 моторчика и логическим сигналом вращаем их в одну или другую сторону.
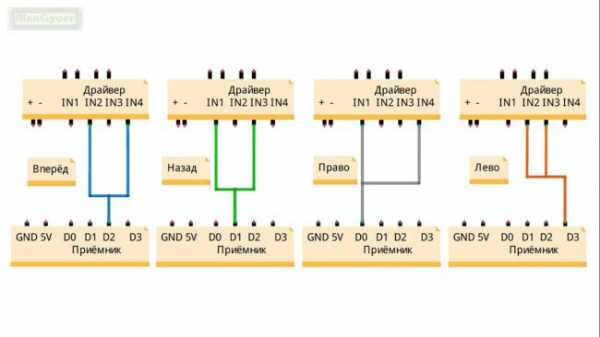
И нет ничего проще, чем соединить эти 2 модуля и получить управление машинкой по танковой схеме. Осталось только придумать, как подключить приемный модуль драйвера моторчика так, чтобы двигатели включались как нам нужно, то есть логика передачи сигнала должна быть примерно вот такая, соответственно кнопкам на пульте.
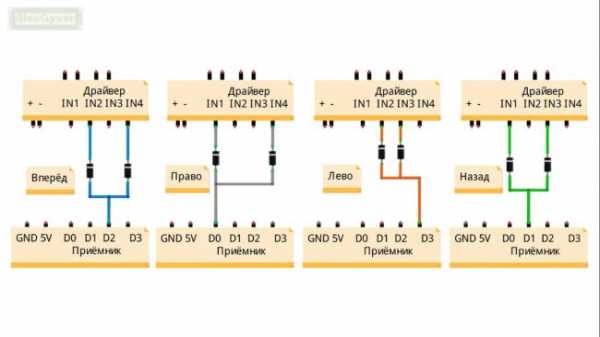
Схемы для каналов по отдельности работают замечательно, но хочется все сразу. Очевидно, что просто взять и подключить все провода как есть нельзя, так как каналы управления будет мешать друг другу и моторчики просто не будут крутиться, если еще ничего не сгорит конечно. Нам нужно защитить каналы управления от взаимного влияния и замыкания. И тут на помощь придут обычные диоды, которые пропускают ток только в одном направлении.
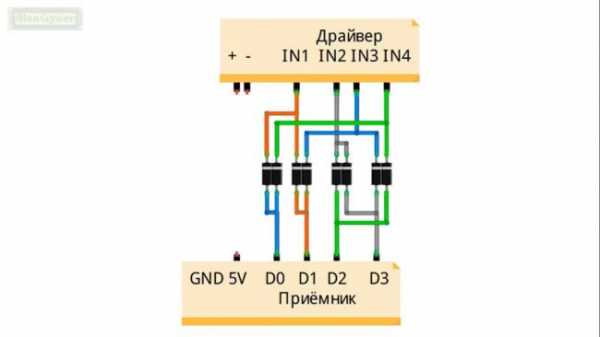
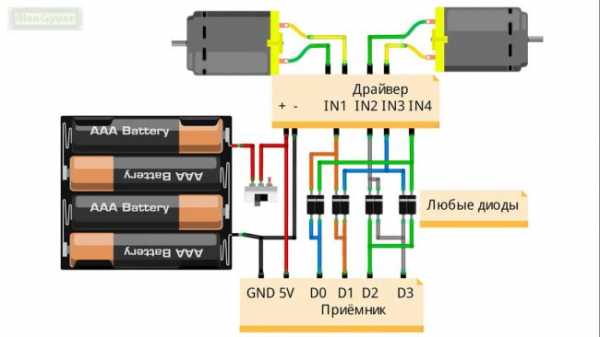
И вот в таком виде схему уже можно совмещать. Слегка оптимизируем для компактности и большей наглядности, ну и останется нам подключить питание, например, от пальчиковых батареек и моторы, можно еще добавить выключатель, но к сожалению, все оказалось не так просто.
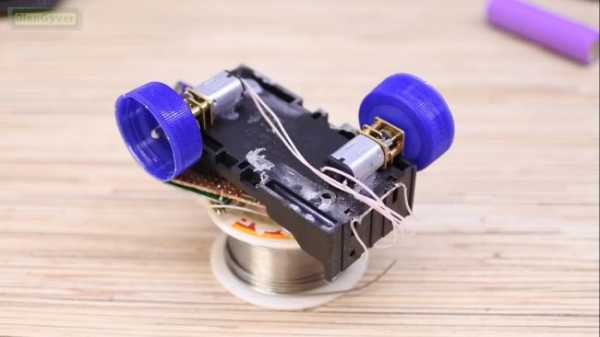
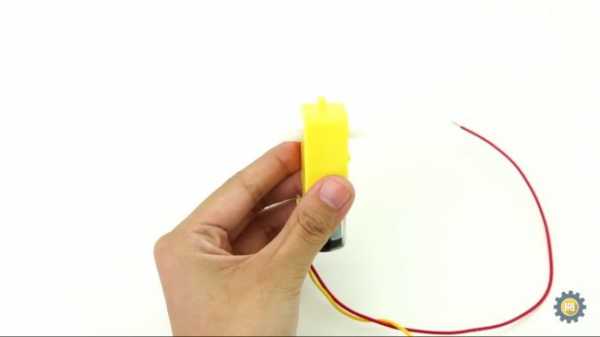
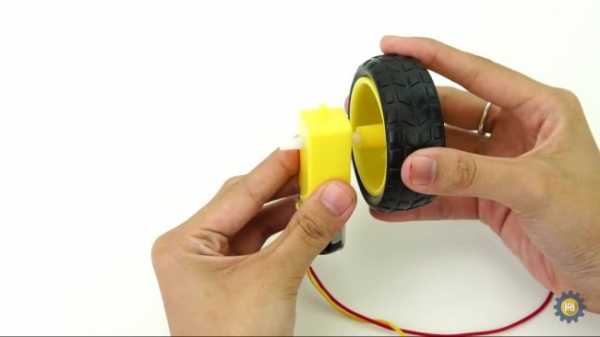
У китайцев есть замечательные готовые мотор-редукторы для самодельных роботов. Продаются они сразу с колесиками. А еще есть micro мотор-редукторы, мы буду использовать их, так как хотим сделать мини робота шпиона.


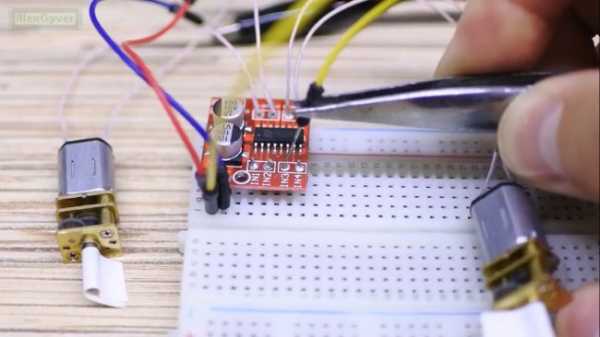
Но для первого теста давайте припаяем большие моторы, и для проверки соберем схему на макетной плате. Берем диоды и подключаем все по схеме.
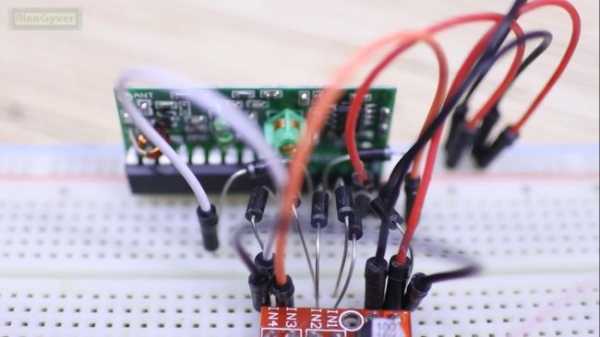
Ну как-то так. Мотор-колеса закрепим на двухсторонний скотч по принципу и так сойдёт – это же макет.

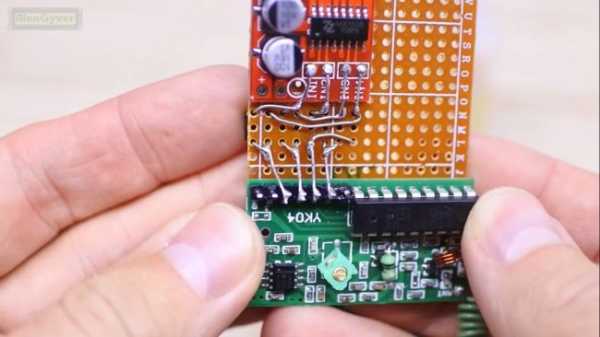
Но лыжи не едут. При удержании кнопки машинка движется рывками, а на тесте со светодиодами мы видели, что сигнал выдается постоянный без рывков, то есть по логике, машинка должна ехать ровно пока нажата кнопка, но этого почему-то не происходит. Давайте разбираться. Начнем с того, что китайцы припаяли антенну на передатчик и не припаяли на приемник. Не, по сути антенна есть в виде дорожки на плате:

Но антенна — это тот самый случай, когда размер все-таки имеет значение. Давайте сделаем свою антенну. Для этого понадобится обычный провод, например, из интернетного кабеля.

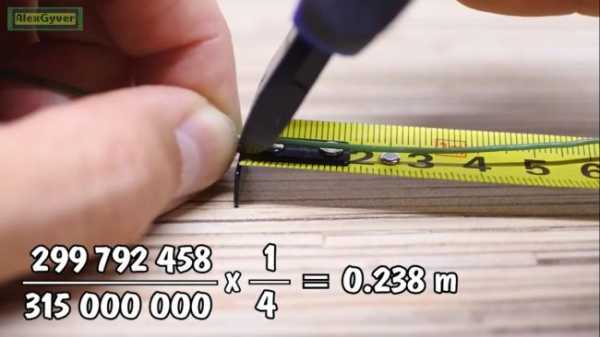
Длина антенны обычно берется равной 1/4 длины волны, так называемый четвертьволновой вибратор. Частота радиосвязи у модуля 315 МГц, переводим частоту в длину волны по школьной формуле через скорость света, делим на 4 и получается 23 с хвостиком сантиметра.
Вот кстати табличка из интернета для разных частот.
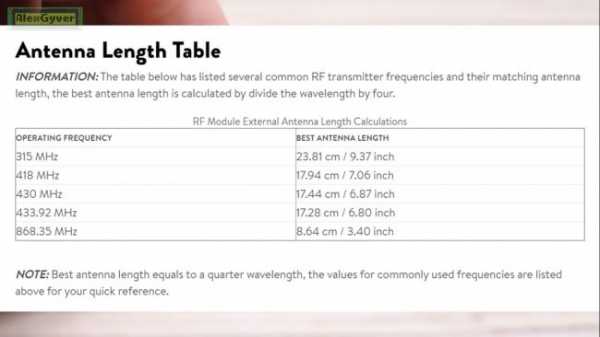
Как видите, мы все делаем правильно. С такой антенной наш робот не будет шпионом, потому что будет торчать слишком длинный палевный кусок провода.
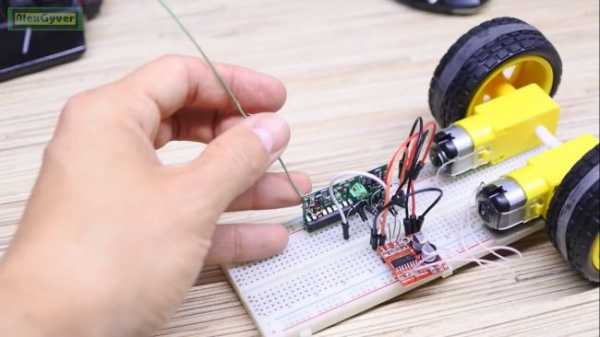
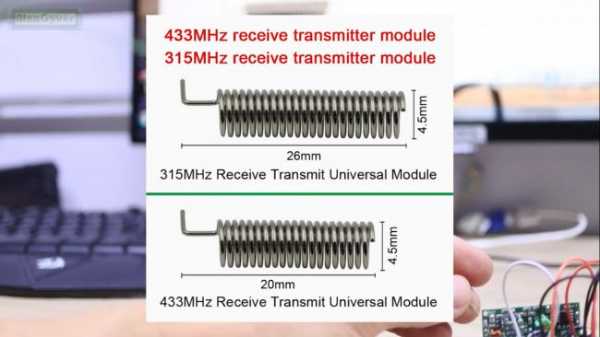
Антенну можно скрутить в спираль. Судя вот по этой картинке из интернета, мотать можно на 4мм.
Возьмем сверло соответствующего диаметра и намотаем на него нашу антенну, а затем припаяем ее к плате.
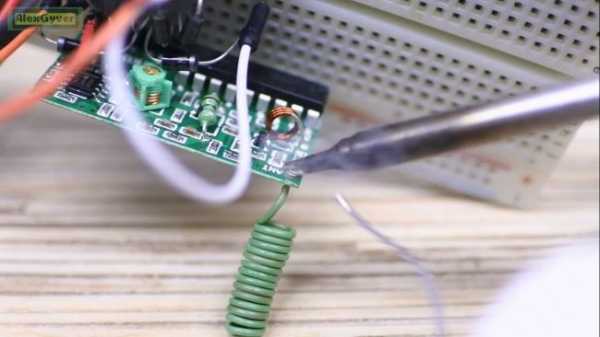
Справиться с высоким стартовым током нам поможет конденсатор параллельно питанию.
Проверяем.

Вблизи от антенны схема работает стабильно. Наверное, проблема все-таки в питании, идет помеха от моторов, так как при раздельном питании моторов и приемника схема работает так как было задумано.
Добавим конденсаторов электролитических и керамических, чтобы сгладить стартовые толчки.
Но все равно ничего не получилось. Будем делать раздельное питание. Один литиевый аккумулятор формата 18650 на питание моторов и еще один на питание радио. Также поставим повышающий преобразователь до 5В, потому что радио работает от 5В, от аккумулятора уже не работает. Для включения питания возьмем двойной тумблер.
Все эти компоненты продаются на Aliexpress. Быстренько пересобираем схему и проверяем ее на работоспособность.
И она черт возьми работает. Вашему вниманию представлена самая простая и дешевая самодельная машинка с пультом дистанционного управления. По питанию радио-модуль автор все-таки поставил пару конденсаторов. Работает идеально.
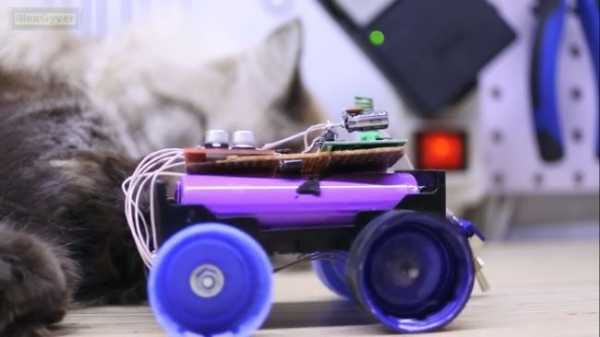
Наш робот будет построен на базе батарейного отсека и маленьких моторчиков. Схема абсолютно такая же как раньше, но для удобства будем собирать на макетной плате.
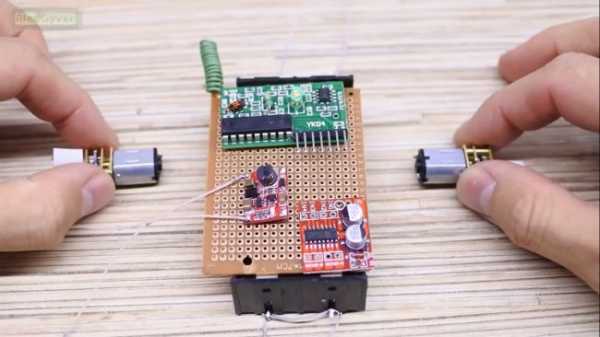
Вот такая в принципе несложная получается сборка.
Далее берём маленькие моторчики и приклеиваем к батарейному отсеку. Суперклей отверждаем обычной пищевой содой, он сразу застывает и образует весьма прочный полимер, которой крепится очень прочно.


Колесами будут обычные крышки от бутылок.

Ведущие колеса сделаем по диагонали, так будет компактнее и машинка лучше поворачивает, но хуже преодолевает препятствия.
Также нам нужны еще 2 колеса, которые будут просто крутится. Закрепим их во втулке из карандаша, он хорошо подошел по размеру. Ось будет из винтика м3, поэтому рассверливаем отверстие на 3мм, собираем и приклеиваем на суперклей.


Обязательно делаем покрышки из вело камеры иначе не поедет. Резину ставим только на ведущие колеса иначе опять же может не поехать.

Ну и как же наша мини машинка шпион без мини-камеры. Автор взял мини камеру для квадрокоптера и Eachine tx-02 3 в 1 (камера + передатчик + антенна).
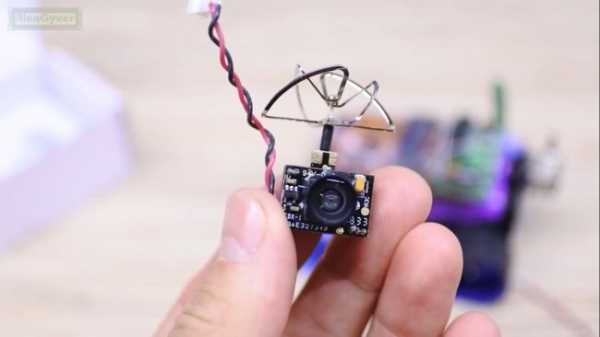
Камера питается от напряжения от 3 до 5В и шлет видео сигнал на частоте 5,8ГГц. Запитаем ее от аккумулятора, от которого питается приемник пульта.
Таким образом, моторы не будут давать помехи на видеосигнал. Крепим на двусторонний скотч и резиночку.

Принимать видеосигнал можно на несколько разных китайских устройств. Есть вот такой крутой дисплей со встроенным приемником и встроенным аккумулятором, также в него можно вставить карту памяти и записывать на нее то, что снимает камера.

У автора к сожалению, его нет, но штука реально клевая и удобная. Второй вариант чуть меньше, но прям то что нужно для нашей шпионской тачки.


Это маленький дисплей с приемником и аккумулятором, при чем не просто дисплей, а часы с 2-х дюймовым дисплеем. Таблицы каналов видеосвязи кодируются четырьмя буквами и восемью цифрами.
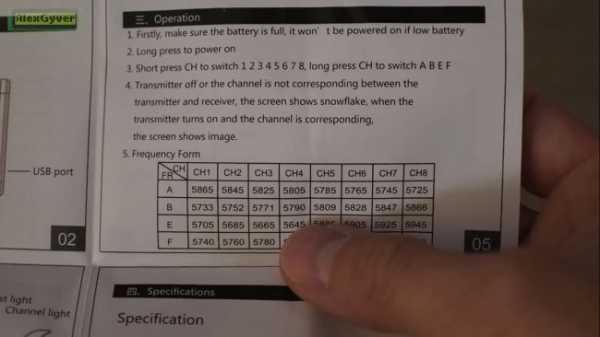
Канал должен совпадать на передатчике и на приемнике. На передатчике у нас канал с номером А8, изменить можно кнопочкой.
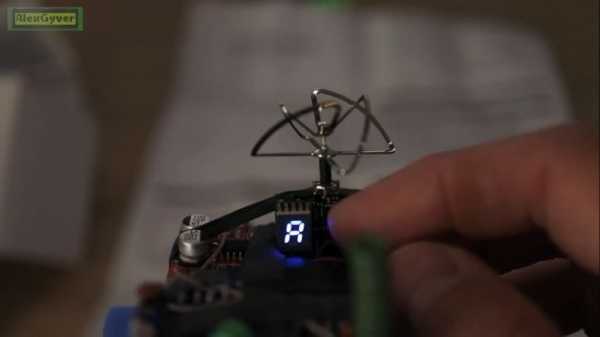
А на часах есть шкала. Кликами и удержанием кнопки можно установить номер канала А8.

Все, есть контакт. Можно начинать слежку.

Третий вариант, в принципе самый дешевый, это такой приемник для смартфона, качаем специальную программку, открываем, подключаем, разрешаем, включаем питание на передатчике видео, на приемнике нажимаем и удерживаем кнопку и начинается сканирование диапазона.
После чего автоматически будет выбрана лучшая частота и можно работать с нашей системой видеонаблюдения.
Самое клёвое то, что можно записать видео прямо в память телефона.

На сегодня это все. Благодарю за внимание. До новых встреч!
Видео:
Источник
 Доставка новых самоделок на почту
Доставка новых самоделок на почтуПолучайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.usamodelkina.ru
Как собрать робота своими руками за 6 часов и стать душой компании / Habr
Сейчас уже мало кто помнит, к сожалению, что в 2005 году были Chemical Brothers и у них был замечательный клип — Believe, где роботизированная рука гонялась по городу за героем видео.Тогда у меня появилась мечта. Несбыточная на тот момент, т. к. ни малейшего понятия об электронике у меня не было. Но мне хотелось верить — believe. Прошло 10 лет, и буквально вчера мне удалось впервые собрать своего собственного робота-манипулятора, запустить его в работу, затем сломать, починить, и снова запустить в работу, а попутно найти друзей и обрести уверенность в собственных силах.
Внимание, под катом спойлеры!
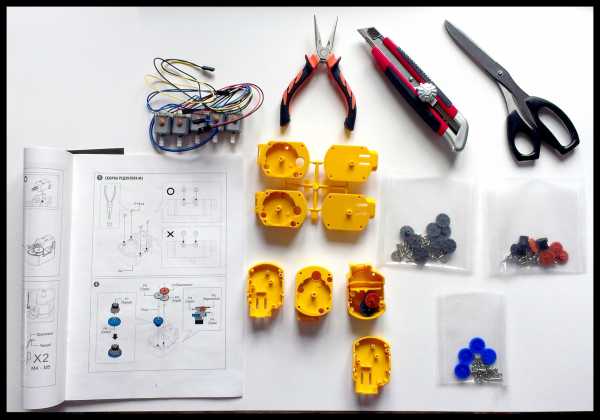
Всё началось с этого набора (привет, Мастер Кит, и спасибо, что разрешили написать в вашем блоге!), который был почти сразу найден и выбран после этой статьи на Хабре. На сайте говорится, что собрать робота — под силу даже 8-летнему ребёнку — чем я хуже? Я точно так же только пробую свои силы.
Сначала была паранойя
Как истинный параноик, сразу выскажу опасения, которые у меня изначально были относительно конструктора. В моём детстве сперва были добротные советские конструкторы, потом рассыпающиеся в руках китайские игрушки… а потом детство кончилось:(
Поэтому из того, что осталось в памяти об игрушках, было:
- Пластмасса будет ломаться и крошиться в руках?
- Детали будут неплотно подходить друг к другу?
- В наборе будут не все детали?
- Собранная конструкция будет непрочной и недолговечной?
И, наконец, урок, который был вынесен из советских конструкторов:
- Часть деталей придётся допиливать напильником
- А части деталей просто не будет в наборе
- И ещё часть будет изначально не работать, её придётся менять
Что я могу сказать сейчас: не зря в моем любимом клипе Believe главный герой видит страхи там, где их нет. Ни одно из опасений не оправдалось: деталей было ровно столько, сколько нужно, все они подходили друг к другу, на мой взгляд — идеально, что очень сильно поднимало настроение по ходу работы.
Детали конструктора не только отлично подходят друг к другу, но также продуман тот момент, что детали почти что невозможно перепутать. Правда, с немецкой педантичностью создатели отложили винтиков ровно столько сколько нужно, поэтому терять винтики по полу или путать «какой куда» при сборке робота нежелательно.
Технические характеристики:
Длина: 228 мм
Высота: 380 мм
Ширина: 160 мм
Вес в сборке: 658 гр.
Питание: 4 батарейки типа D
Вес поднимаемых предметов: до 100 гр
Подсветка: 1 светодиод
Тип управления: проводной дистанционный пульт
Примерное время сборки: 6 часов
Движение: 5 коллекторных моторов
Защита конструкции при движении: храповик
Подвижность:
Механизм захвата: 0-1,77”
Движение запястья: в пределах 120 градусов
Движение локтя: в пределах 300 градусов
Движение плеча: в пределах 180 градусов
Вращение на платформе: в пределах 270 градусов
Вам понадобятся:
- удлинённые плоскогубцы (не получится обойтись без них)
- боковые кусачки (можно заменить на нож для бумаги, ножницы)
- крестовая отвёртка
- 4 батарейки типа D
Важно! О мелких деталях
Кстати о «винтиках». Если вы сталкивались с подобной проблемой, и знаете, как сделать сборку ещё удобнее — добро пожаловать в комментарии. Пока что поделюсь своим опытом.
Одинаковые по функции, но разные по длине болты и шурупы достаточно чётко прописаны в инструкции, например, на средней фото внизу мы видим болты P11 и P13. А может P14 — ну, то есть, вот опять, я снова их путаю. =)
Различить их можно: в инструкции прописано, какой из них сколько миллиметров. Но, во-первых, не будешь же сидеть со штангенциркулем (особенно если тебе 8 лет и\или у тебя его попросту нет), а, во-вторых, различить их в итоге можно только, если положить рядом, что может не сразу прийти на ум (мне не пришло, хе-хе).
Поэтому заранее предупрежу, если надумаете собирать этого или похожего робота сами, вот вам подсказка:
- либо заранее присмотритесь к крепёжным элементам;
- либо купите себе побольше мелких винтов, саморезов и болтов, чтобы не париться.
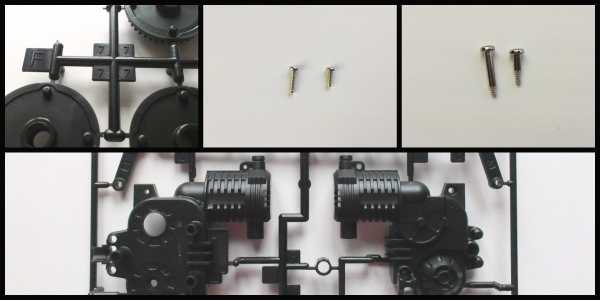
Также, ни в коем случае не выбрасывайте ничего, пока не закончите сборку. На нижней фотографии в середине, между двумя деталями от корпуса «головы» робота — небольшое кольцо, которое чуть не полетело в мусор вместе с прочими «обрезками». А это, между прочим, держатель для светодиодного фонарика в «голове» механизма захвата.
Процесс сборки
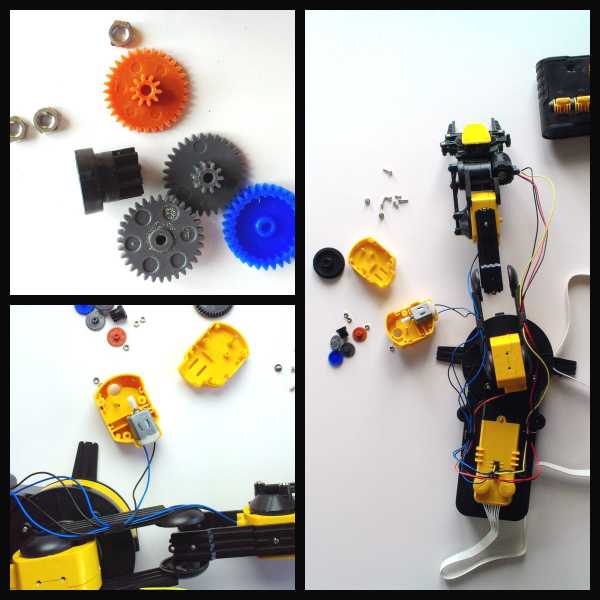
К роботу прилагается инструкция без лишних слов — только изображения и чётко каталогизированные и промаркированные детали.
Детали достаточно удобно откусываются и зачистки не требуют, но мне понравилась идея каждую деталь обработать ножом для картона и ножницами, хотя это и не обязательно.
Сборка начинается с четырёх из пяти входящих в конструкцию моторов, собирать которые настоящее удовольствие: я просто обожаю шестерёночные механизмы.
Моторчики мы обнаружили аккуратно упакованными и «прилипшими» друг к другу — готовьтесь ответить на вопрос ребёнка, почему коллекторные моторчики магнитятся (можно сразу в комментариях! 🙂
Важно: в 3 из 5 корпусов моторчиков нужно утопить гайки по бокам — на них в дальнейшем мы посадим корпуса при сборке руки. Боковые гайки не нужны только в моторчике, который пойдёт в основу платформы, но чтобы потом не вспоминать, какой корпус куда, лучше утопите гайки в каждом из четырёх жёлтых корпусов сразу. Только для этой операции будут нужны плоскогубцы, в дальнейшем они не понадобятся.
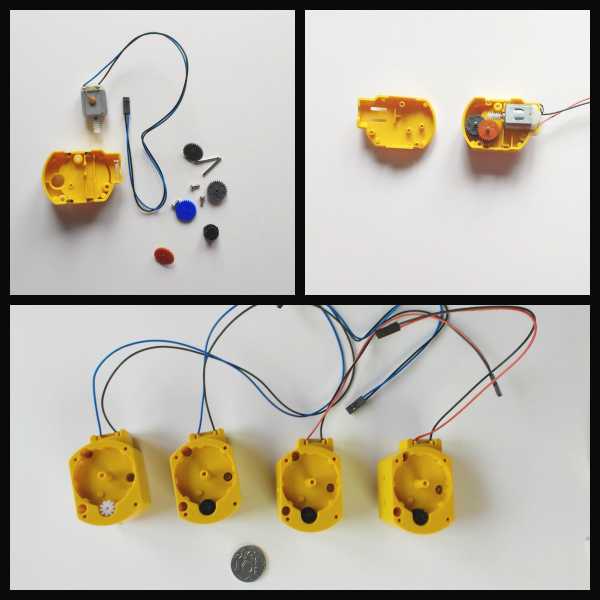
Примерно через 30-40 минут каждый из 4х моторов оказался снабжён своим шестереночным механизмом и корпусом. Собирается всё не сложнее, чем в детстве собирался «Киндер-сюрприз», только гораздо интереснее. Вопрос на внимательность по фото выше: три из четырёх выходных шестерёнок черные, а где белая? Из её корпуса должны выходить синий и чёрный провод. В инструкции это всё есть, но, думаю, обратить на это внимание ещё раз стоит.
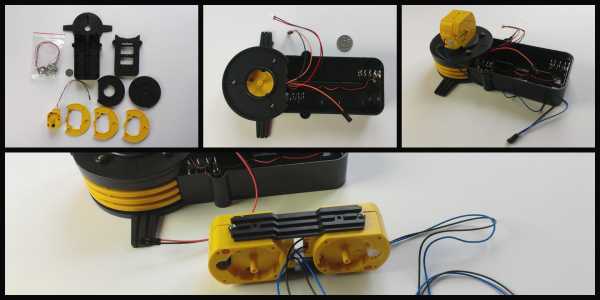
После того, как у вас на руках оказались все моторы, кроме «головного», вы приступите к сборке платформы, на которой будет стоять наш робот. Именно на этом этапе ко мне пришло понимание, что с шурупами и винтами надо было поступать более вдумчиво: как видно на фото выше, двух винтов для скрепления моторчиков вместе за счет боковых гаек мне не хватило — они уже были где-то мною же вкручены в глубине уже собранной платформы. Пришлось импровизировать.
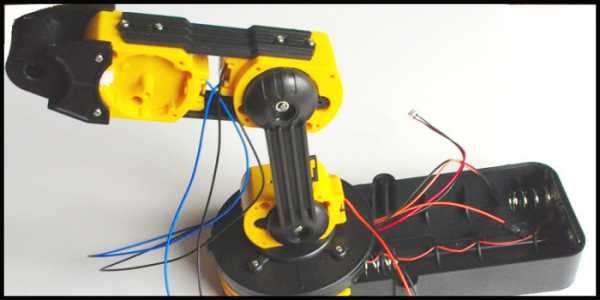
Когда платформа и основная часть руки собраны, инструкция предложит вам перейти к сбору механизма захвата, где полно мелких деталей и подвижных частей — самое интересное!

Но, надо сказать, что на этом спойлеры закончатся и начнутся видео, так как мне нужно было ехать на встречу с подругой и робота, которого не удалось успеть закончить, пришлось захватить с собой.
Как стать душой компании при помощи робота
Легко! Когда мы продолжили сборку вместе, стало понятно: собирать робота самостоятельно — очень приятно. Работать над конструкцией вместе — приятно вдвойне. Поэтому смело могу рекомендовать этот набор для тех, кто не хочет сидеть в кафе за скучными разговорами, но хочет повидаться с друзьями и хорошо провести время. Более того, мне кажется, и тимбилдинг с таким набором — например, сборка двумя командами, на скорость — практически беспроигрышный вариант.
Робот ожил в наших руках сразу, как только мы закончили сборку. Передать вам наш восторг, я, к сожалению, не могу словами, но, думаю, многие меня здесь поймут. Когда конструкция, которую ты сам собрал вдруг начинает жить полноценной жизнью — это кайф!
Мы поняли, что жутко проголодались и пошли поесть. Идти было недалеко, поэтому робота мы донесли в руках. И тут нас ждал ещё один приятный сюрприз: робототехника не только увлекательна. Она ещё и сближает. Как только мы сели за столик, нас окружили люди, которые хотели познакомиться с роботом и собрать себе такого же. Больше всего ребятам понравилось здороваться с роботом «за щупальца», потому что ведёт он себя действительно как живой, да и в первую очередь это же рука! Словом, основные принципы аниматроники были освоены пользователями интуитивно. Вот как это выглядело:
Troubleshooting
По возвращении домой меня ждал неприятный сюрприз, и хорошо, что он случился до публикации этого обзора, потому что теперь мы сразу обговорим troubleshooting.
Решив попробовать подвигать рукой по максимальной амплитуде, удалось добиться характерного треска и отказа функциональности механизма мотора в локте. Сначала это меня огорчило: ну вот, новая игрушка, только собрана — и уже больше не работает.
Но потом меня осенило: если ты сам её только что собрал, за чем же дело стало? =) Я же прекрасно знаю набор шестерёнок внутри корпуса, а чтобы понять, сломался ли сам мотор, или просто недостаточно хорошо был закреплён корпус, можно не вынимая моторчика из платы дать ему нагрузку и посмотреть, продолжатся ли щелчки.
Вот тут-то мне и удалось почувствовать себя настоящим робо-мастером!
Аккуратно разобрав «локтевой сустав», удалось определить, что без нагрузки моторчик работает бесперебойно. Разошёлся корпус, внутрь выпал один из шурупов (потому что его примагнитил моторчик), и если бы мы продолжили эксплуатацию, то шестерёнки были бы повреждены — в разобранном виде на них была обнаружена характерная «пудра» из стёршейся пластмассы.
Очень удобно, что робота не пришлось разбирать целиком. И классно на самом деле, что поломка произошла из-за не совсем аккуратной сборки в этом месте, а не из-за каких-то заводских трудностей: их в моём наборе вообще обнаружено не было.
Совет: первое время после сборки держите отвёртку и плоскогубцы под рукой — могут пригодиться.
Что можно воспитать благодаря данному набору?
Уверенность в себе!
Мало того, что у меня нашлись общие темы для общения с совершенно незнакомыми людьми, но мне также удалось самостоятельно не только собрать, но и починить игрушку! А значит, я могу не сомневаться: с моим роботом всегда всё будет ок. И это очень приятное чувство, когда речь идёт о любимых вещах.
Мы живём в мире, где мы страшно зависим от продавцов, поставщиков, сотрудников сервиса и наличия свободного времени и денег. Если ты почти ничего не умеешь делать, тебе за всё придётся платить, и скорее всего — переплачивать. Возможность починить игрушку самому, потому что ты знаешь, как у неё устроен каждый узел — это бесценно. Пусть у ребёнка такая уверенность в себе будет.
Итоги
Что понравилось:
- Собранный по инструкции робот не потребовал отладки, запустился сразу
- Детали почти невозможно перепутать
- Строгая каталогизация и наличие деталей
- Инструкция, которую не надо читать (только изображения)
- Отсутствие значимых люфтов и зазоров в конструкциях
- Лёгкость сборки
- Лёгкость профилактики и починки
- Last but not least: свою игрушку собираешь сам, за тебя не трудятся филиппинские дети
Что нужно ещё:
- Ещё крепёжных элементов, прозапас
- Детали и запчасти к нему, чтобы можно было заменить при необходимости
- Ещё роботов, разных и сложных
- Идеи, что можно улучшить\приделать\убрать — словом, на сборке игра не заканчивается! Очень хочется, чтобы она продолжалась!
Вердикт:
Собирать робота из этого конструктора — не сложнее, чем паззл или «Киндер-сюрприз», только результат гораздо масштабнее и вызываЛ бурю эмоций у нас и окружающих. Отличный набор, спасибо, Даджет!
В заключение, Хабр, у меня к тебе несколько вопросов:
- Как бы ты использовал собственный манипулятор?
- Как думаешь, можно ли что-то поменять или добавить в конструкции самого робота, чтобы не останавливаться и продолжать играть?
- Что, возможно, не было мною учтено в процессе сборки?
- Да и вообще, как тебе обзор? =)
habr.com
Как сделать простого робота «стенолаза» своими руками!

Доброго времени суток любители роботов и прочих самодвижущихся самоделок! Сегодня решил собрать довольно интересную самоделку, а именно робота передвигающегося по металлическим стенам. В принципе результатом своей работы я почти доволен, но если бы у меня был аккумулятор по меньше и по мощнее, то результат был бы просто отличным, но пришлось использовать то что было, думаю в скором времени я всё же приобрету небольшой аккумулятор для своих нужд.
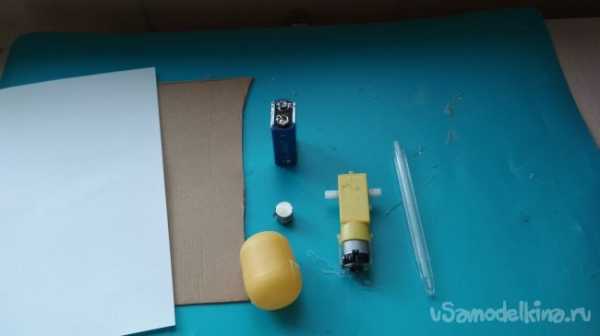
И так для данного робота нам понадобится:
-мотор редуктор
-картон
-бумага
-источник питания на 3,7-9 вольт (в начале я использовал крону, но из-за нехватки мощности пришлось заменить на аккумулятор типа18650)
-трубочки от ручки
-неодимовые магнитики
-провода
-выключатель
-баночка от киндера
Из инструментов нам также понадобится:
-термо клей
-паяльник
-ножницы
И так первым делом нужно вырезать из картона восемь равных по размеру кусочки, 4 см в длину и 1,5 см в ширину:

Затем от трубочки от ручки отрезаем два одинаковых кусочка примерно по 1,5 см в длину:

Приклеиваем наши прошлые заготовки к каждому кусочку трубочки по 4 штуки, так как показано на фото:
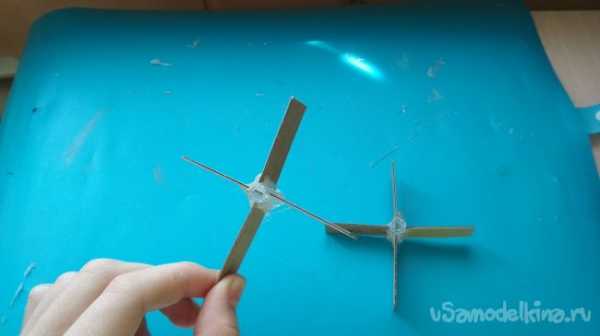
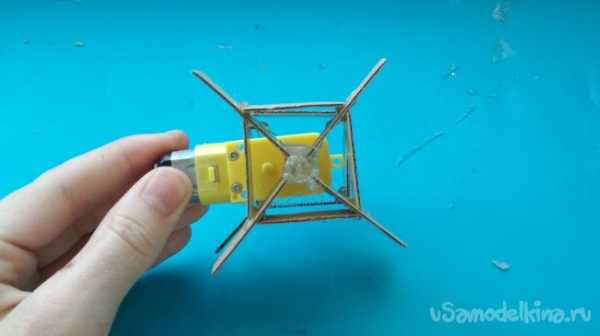
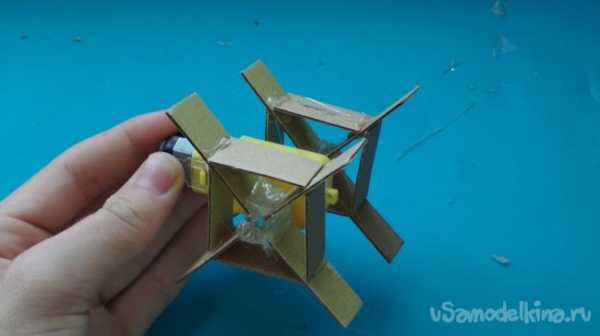
Теперь из того же картона вырезаем 8 кусочков по 35 мм в длину и 15 мм в ширину:

Приклеиваем их вот таким вот образом:
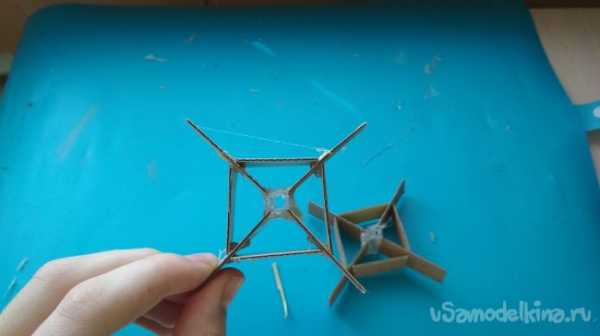

Затем надеваем их на ось редуктора, так чтобы они были параллельно друг к другу:
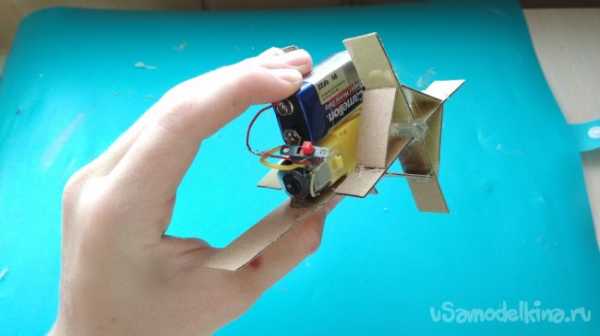
Берём наш источник питания и подсоединяем его к редуктору через выключатель:

Приклеиваем источник питание поверх редуктора, так чтобы наши “колёса” не задевали его:

Вырезаем из картона ещё один кусочек примерно 5-7 см в длину:

Приклеиваем его к нижней части редуктора, так чтобы выступало примерно 4 см:
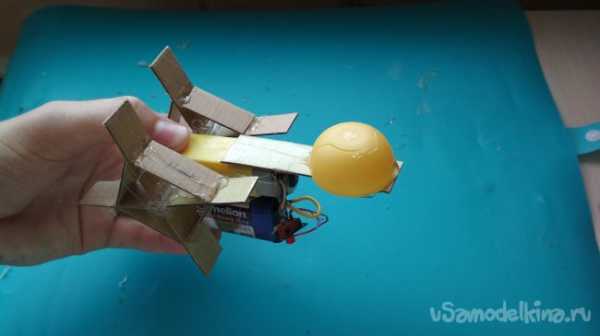
Берём баночку от киндера и отрезаем от неё крышку, затем делаем два небольших надрезов и загибаем так как показано на фото, это нужно для того чтобы крышка лучше приклеилась к картонке

Приклеиваем вот таким вот образом:

Нарезаем из бумаги 8 примерно равных кусочка по 4-5 см (на фото они меньше так как я сделал ошибку и в первой модели данного робота сделал отрезки по 2 см и потом просто приклеил магниты к ним, но из-за того что магниты были открытые, они просто примагничивались к поверхности, а затем отрывались, так что я придумал делать некое подобие “конвертиков” из бумаги в которые клались магнитики, затем наши “конвертики” нужно приклеить к каждому выступу “колёс” так как показано на нижних фото)
Проведя несколько испытаний стало понятно что кроны не хватает и нужно что то по мощнее, поэтому я поменял крону на аккумулятор 18650, но его главный минус это то что он слишком тяжёлый, поэтому в идеале использовать небольшие аккумуляторы, на подобе тех что стоят в квадрокоптерах и радиоуправляемых самолётах

Ну вот и всё, наш робот “стенолаз” готов и осталось только его протестировать! Данный робот из-за тяжести аккумулятора двигается по стене очень медленно, но двигается! К тому же он довольно шустро передвигается по земле, думаю такая игрушка понравится детям.
Надеюсь данная статья была кому то полезна.
Доставка новых самоделок на почтуПолучайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.usamodelkina.ru
Как сделать автоматического робота пылесоса своими руками

Всем доброго времени суток дорогие друзья! В сегодняшней статье я бы вам хотел показать довольно интересную идею самоделки, которую сможет сделать практически любой, кто хоть немного занимался рукоделием и кто немного разбирается в Ардуино.
В общем, сегодня будем делать простого роботы пылесоса из картона своими руками. Но вы скажите, ведь я же уже рассказывал, как можно сделать робота уборщика своими руками, и будете правы, но данный робот пылесос намного проще, дешевле и удобнее, чем предыдущий. Да и эта модель доработанная и выглядит лучше, а также имеет полную автоматику на борту. Данная поделка, не только поможет скоротать досуг, но и станет незаменимым помощником в вашем доме или мастерской. Короче вещь полезная и не сложная.
Ну чтож, хватит длинных предисловий, погнали!
И так, для данной самоделки нам понадобится:
-гофрированный картон (много картона)
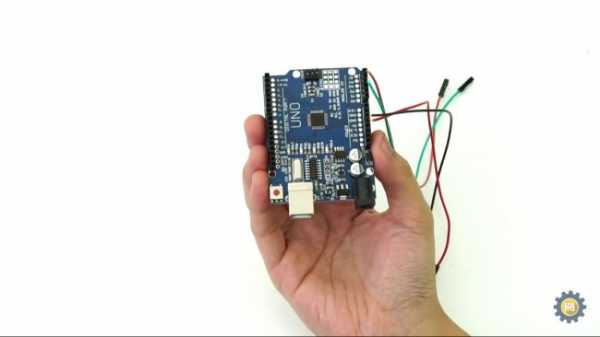
-Плата Урдуино (Нано или Уно решать вам)
-соединительные провода
-два мотора редуктора (Заказывал себе с Алиэкспресс, удобная вещь)
-Ультразвуковой дальномер (стоит копейки)
-Колёса под моторы редукторы
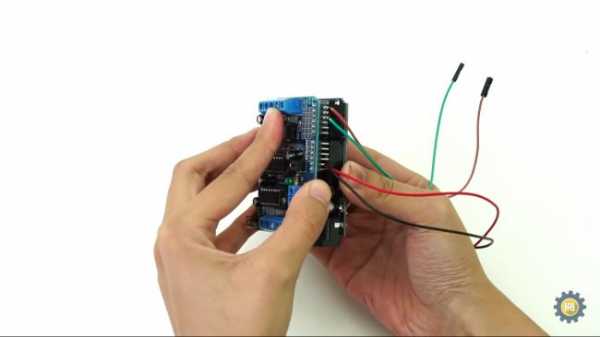
-драйвер двигателей под Ардуино (автор самоделки использует модельный драйвер, который для подключения необходимо просто вставить в ардуино, но вы же можете использовать удобный вам драйвер, главное чтобы по напряжению подходил под моторы редукторы)
-микро моторчик с редуктором, всего нужно две штуки
-пластиковые крышки от бутылок
-щетинки от метлы
-мотор с турбинным вентилятором, в принципе можно сделать и самому
-пластиковая сеточка
-небольшой контейнер
-бокс под два аккумулятора 18650
-сами аккумуляторы 18650 (качественная модель)
Из инструментов нам также понадобятся:
-паяльник
-клеевой пистолет
-канцелярский нож
-линейка
-карандаши или маркеры
Первым делом необходимо взять большой лист картона, линейку и циркуль. Отмеряем 13 см циркулем и чертим круг на картоне, после чего вырезаем, всего нам понадобится два таких круга:
Затем всё из того же картона вырезаем прямоугольник небольших размеров. Берём линейку и карандаш, с помощью карандаша расчерчиваем картонку с интервалом, примерно 1 см. После данной процедуры, берём канцелярский нож и делаем небольшие надрезы верхнего слоя картона, не задевая нижний. Это необходимо для того, чтобы картон стал более эластичным:
Скручиваем сделанную раннее заготовку вокруг одного из картонных кругов, и конечно проклеиваем термоклеем:

Займёмся электроникой и механической частью.
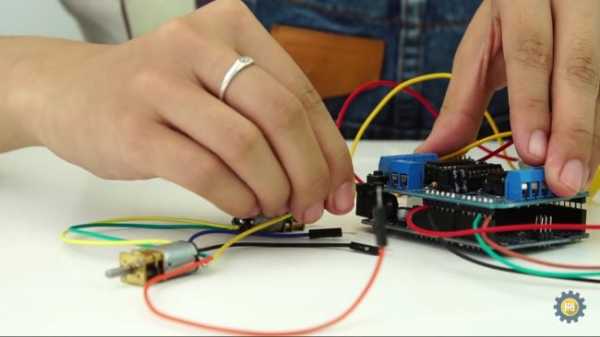
Для начала возьмём мотор редуктор и наденем на него колесо, всё то же самое делаем и со вторым моторчиком:
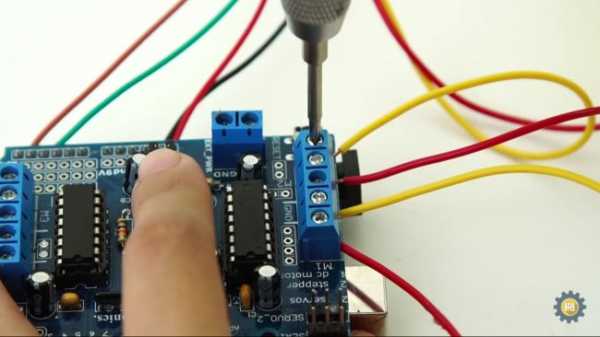
Затем берём плату Ардуино Уно и соединительные провода, которые в свою очередь нужно подключить к определённым пинам (контактам) на плате. Для удобства берём разного цвета: красный подключаем к 5 вольтам, чёрный к GND, а два другие к двум разным пинам. То к каким пинам подключать провода, необходимо сразу узнать исходя из кода, либо же сами прописывайте пины к которым подключены ваши провода. В целом ничего сложного здесь нет,подключаем:
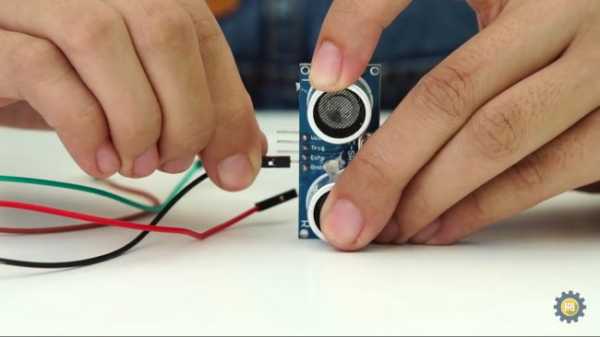
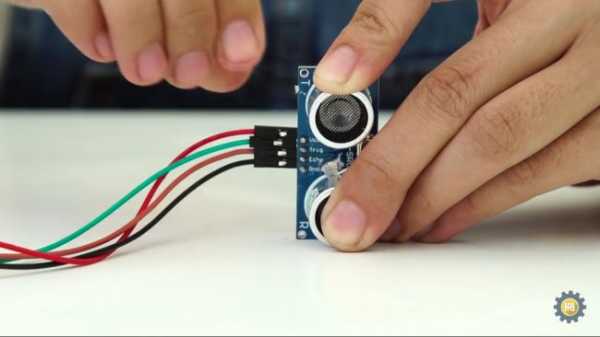
Противоположную сторону проводов подключаем к ультразвуковому дальномеру так, как показано на фото нижу, если не понятно, то можете посмотреть на видео автора.
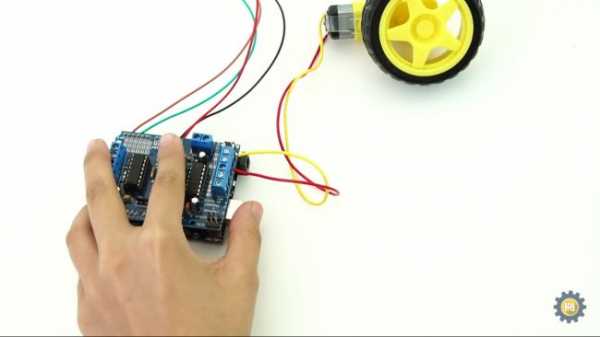
Мотор редукторы подключаем к драйверу двигателей, тут даже не нужно ни чего паять, просто вставляете в зажимы и всё:
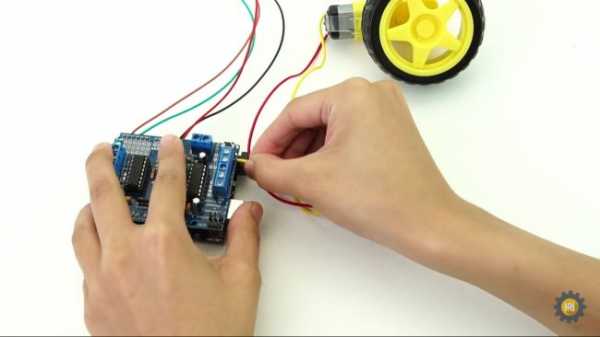
К мини моторчикам необходимо припаять соединительные провода, с помощью которых, мы будем подключать эти самые моторчики к драйверу двигателей. В общем подключаем:
Теперь берём оставшийся картонный круг, который делали в самом начале. На неё необходимо начертить ещё один круг по центру и несколько прямоугольников. Всю разметку вы можете посмотреть на фото ниже. Затем вырезаем размеченные отверстия, должно получиться так же, как и на фото ниже:
Берём всю электронику и размещаем её на сделанном ранее картонном круге. Маленькие моторчики вставляем в прорезанные прямоугольные отверстия, а остальную электронику крепим на термоклей, крупные мотор редукторы крепим параллельно на задней части, а ультразвуковой дальномер пока не трогаем:
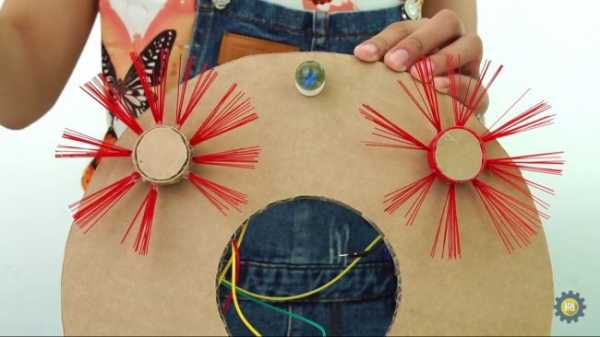
Снимаем с пластиковых бутылок крышки, нам понадобится всего две штуки. С помощью паяльника, горячего гвоздя или шила, делаем отверстия: одно по центру крышки, а другие по бокам с отступом примерно 1 см. В проделанные по бокам отверстия просовываем наружу, заранее подготовленные щетинки от метлы, они должны быть одинакового размера. Закрепляем эти щетинки с помощью термоклея. Всего необходимо сделать две такие заготовки.
Их мы приклеиваем на ось маленьких моторчиков, которые расположены на картонном круге. Приклеиваем опять-таки термоклеем:
Спереди, между двух щёток, приклеиваем небольшой шарик, либо же маленькое колёсико, которое может вращаться вокруг своей оси:
Теперь нам понадобится электрический мотор с турбиной, которая может всасывать воздух, в целом может подойти и очень мощный кулер. На переднюю часть турбины надеваем и закрепляем пластиковую сетку, она нужна для защиты турбины, то есть для предотвращения попадания крупного мусора и его отсеивания. С пластикового контейнера снимаем крышку. Контейнер желательно должен быть круглой форму. В крышке проделываем ровное круглое отверстие, в которое необходимо вставить и приклеить турбину с сеточкой. В самом же контейнере, проделываем небольшое прямоугольное отверстие с краю. Надеваем крышку с турбиной на контейнер и готово. Всасывающая часть робота закончена. Хочу напомнить, что всё необходимо делать так, как показано на фото ниже:
Берём основу робота и устанавливаем в центральное отверстие контейнер с турбиной и всё крепко проклеиваем термоклеем. Затем с боку конструкции устанавливаем бокс с аккумуляторами типа 18650 и выключатель присоединённый к одному из проводов идущего от бокса. Подключаем новые провода для запитки Ардуино, делаем финальные стрижки и можно продолжать.
Ультразвуковой дальномер вставляем в специальные отверстия, которые нужно сделать заранее в корпусе робота. Этот корпус, как можете помнить делали ещё в начале. Автор статьи добавил ещё декоративные элементы в виде ушек, а ультразвуковой дальномер выходит вместо глазок, выглядит всё это очень даже неплохо. Корпус надеваем поверх основания конструкции и закрепляем, но не сильно, поскольку в случае чего, нужно будет достать аккумуляторы для зарядки. Конечно можно установить модель для зарядки аккумуляторов прямо в робота, но качественную зарядку он вряд ли заменит.
Остается только залить прошивку на Ардуино, вообще, лучше всего это делать после подключения всех электронных компонентов, для проверки схемы и кода, но можно сделать и потом. Скетч для заливки на Ардуино лучше всего написать самостоятельно, но можно и просто найти в интернете уже готовый скетч для роботов с одним ультразвуковым датчиком, который объезжает препятствие, благо таких скетчей сейчас полно. Но для избежания различных подводных камней \, лучше писать самостоятельно, под себя.
Ну вот и всё! Простой и функциональный робот пылесос готов и осталось только его протестировать! Для этого просто включаем его и пускаем ездить по полу и запылесосивать весь мусор. Робот передвигается сам и поворачиваем при приближении преграды и это намного удобнее предыдущих моделей.
Вот видео от автора с подробной сборкой и испытаниями самоделки:
Так же можно запитать данного робота от мощного повербанка, мой подробный обзор на неплохой можете посмотреть, конечно кому это будет интересно:
Ну и всем пока и удачи в будущих проектах самодельщики!
Источник
Доставка новых самоделок на почтуПолучайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.usamodelkina.ru
Делаем самого простого робота своими руками
Сделать самый простой робот под силу даже тем, кто только взял в руки паяльник.
Преимущественно наш робот (в зависимости от конструкции) будет бегать на свет либо наоборот убегать от него, бежать вперед в поисках луча света или же пятиться как крот назад.
Для нашего будущего «искусственного интеллекта» понадобятся:
- Микросхема L293D
- Маленький электромотор М1 (его можно вытащить из игрушечных автомобилей)
- Фототранзистор и резистор с номиналом 200 Ом.
- Провода, батарейка и, конечно же, сама платформа, где это все будет размещаться.
Если в конструкцию добавить еще парочку ярких светодиодов, то легко можно добиться, того, что робот просто будет бегать за рукой или даже следовать по светлой или темной линии. Наше создание будет типичным представителем роботов класса BEAM. Принцип поведения таких роботов заключается на «фоторецепции», то есть свет, в данном случае, будет выступать в качестве источника информации.
Наш робот будет двигаться вперед, при попадании на него луча света. Такое поведение устройства называется «фотокинезисом» – ненаправленное увеличение или уменьшение подвижности в ответ на изменение уровня освещенности.
В нашем устройстве, как было сказано выше, использовался фототранзистор n-p-n структуры – PTR-1 в качестве фотосенсора. Здесь можно использовать не только фототранзистор, но и фоторезистор или фотодиод, так как принцип работы у всех элементов одинаковый.
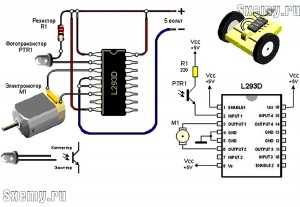
На рисунке сразу приведена монтажная схема робота. Если Вы еще не достаточно хорошо знакомы с техническими условными обозначениями, то, здесь исходя из этой схемы, несложно будет понять принципы обозначения и подсоединения элементов друг к другу.
GND. Провода, соединяющие различные элементы схемы с «землей» (отрицательный полюс источника питания), обычно на схемах не отображают полностью. Вместо этого рисуют маленькую черточку, обозначающую соединение с «землей». Иногда, рядом с черточкой пишут «GND» – от анг. слова «ground» – земля.
Vcc. Данное обозначение показывает, что через эту часть схема соединена с источником питания – Положительный полюс! Иногда на схемах вместо этих букв часто пишут номинал тока. В данном случае +5V.
Принцип действия робота.
При попадании на фототранзистор (на схеме он указан как PRT1) луча света, на выходе микросхемы INPUT1 появляется положительный сигнал, который заставляет мотор М1 – работать. И наоборот, когда луч света перестает освещать фототранзистор – сигнал на выходе микросхемы INPUT1 исчезает, следовательно, и мотор останавливается.
Резистор R1 в данной схеме предназначен компенсации, проходящего тока через фототранзистор. Номинал резистора 200 Ом – конечно можно сюда припаять резисторы и с другими показателями номиналов, но следует помнить, что от номинала будет зависеть чувствительность фототранзистора, а значит и работоспособность самого робота.
Если номинал резистора будет большим, то робот станет реагировать только на очень яркий луч света, а если небольшим – то и чувствительность будет намного выше.
Коротко говоря – не следует использовать в данной схеме резисторы с сопротивлением менее 100 Ом, иначе фототранзистор может просто-напросто перегреться и выйти из строя.
В общем, пища для размышления вам дана. Обратите внимание на схему самой микросхемы. Здесь четко изображены все входы и выходы сигналов. Комбинируя способы подключения моторчика и фоторезистора, вы легко можете изменять поведение этого робота. Более подробно о роботах можно узнать у нашего друга modelist-konstruktor.com
volt-index.ru
Как сделать простого «робота» попрыгунчика своими руками
Всем доброго времени суток дорогие друзья! В сегодняшней статье я бы хотел с вами поделиться очень интересной идеей простой самоделки. Данная самоделка хоть и простая, но очень забавная и думаю, многие захотят сделать подобную игрушку. Для новичков кстати данная самоделка идеально подходит, но и бывалым рукодельникам она тоже может понравиться. В общем сегодня рассмотрим как можно сделать просто “робота” попрыгунчика из доступных материалов своими руками. В данном “роботе” используется очень распространённый мотор редуктор, который многие часто используют.
Ну не будем тянуть с длинным предисловием, погнали!
И так, для данной самоделки понадобится:
-шпажка для барбекю
-трубочки от коктейлей
-деревянный шпатель
-мотор редуктор из Китая
-мини аккумулятор на 7.4 вольта
-две крышечки от тюбиков с кетчупами или майнезами
-небольшая резинка
-провода
-выключатель
-конектор для аккумулятора
Из инструментов также понадобится:
-термоклей
-паяльник
-кусачки
-ножницы
-шуроповерт или электрическая дрель
Первым делом от шпажки для барбекю необходимо отрезать два равных, но не очень длинных отрезка. Делать это лучше всего с помощью обычных кусачек:
Теперь берём эти две заготовки и с помощью канцелярского ножа стачиваем их до половины. Как это должно выглядеть можно посмотреть на фото ниже. Стачивать необходимо очень аккуратно, так, чтобы не сломать саму заготовку. Так что со всей аккуратностью берём и стачиваем:

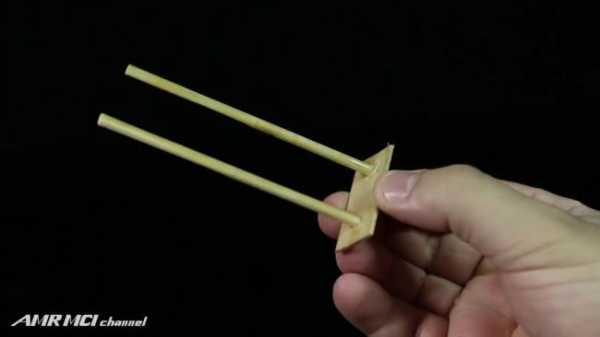
От деревянного шпателя отрезаем небольшой ровный кусочек, как на фото ниже. Затем с помощью шуроповёрта или мини эклектической дрели сверлим два сквозных отверстия по бокам детали. Сверлить, также необходимо очень аккуратно, чтобы деталь не разломилась:

С помощью супер клея нужно приклеить отрезки шпажек от барбекю и прямоугольную деталь из шпателя, которую делали ранее. Для этого вставляем отрезки шпажек под небольшим углом в отверстия детали из шпателя и приклеиваем. Можно заменить, что вставлять в отверстия детали, необходимо той стороной отрезка шпажки, которая не сточена:
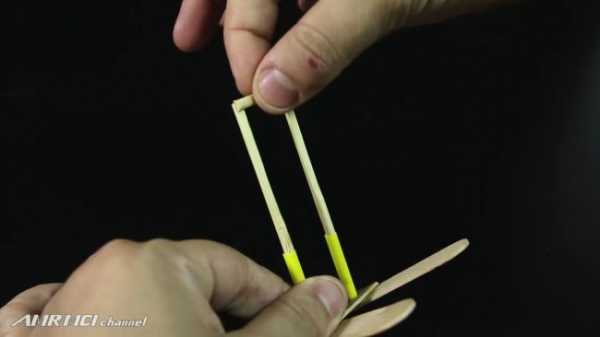
Берём ещё один деревянный шпатель и разрезаем его ровно пополам. После чего приклеиваем к обеим деталям прошлую заготовку. Приклеивать можно и с помощью супер клея и с помощью термоклея, думаю даже можно использовать ПВА клей.


Затем от трубочки для коктейлей отрезаем два небольших кусочка равной длины. Их необходимо надеть по одной штуке на каждую шпажку. В общем так, как показано на фото ниже:

Верхние концы шпажек соединяем вместе с помощью ещё одного маленького отрезка шпажки от барбекю. Склеивая естественно супер клеем:
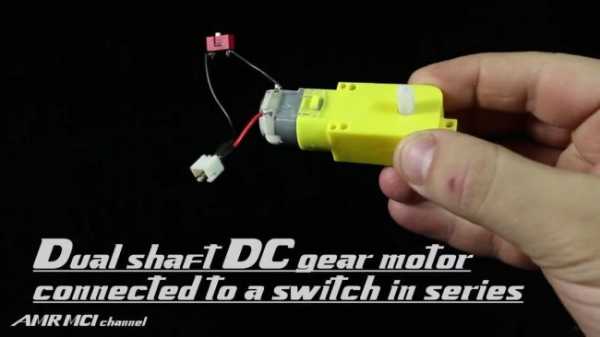
Теперь необходимо взять мотор редуктор, кстати я сам его часто использую в различных своих проектах и самоделках, вещь действительно стоящая, поэтому советую приобрести и вам, к тому же стоит он не очень и много, так что дерзайте.
К мотору необходимо припаять мини выключатель и коннектор для аккумулятора, который вы собираетесь использовать. В спайке этих компонентов ничего сложного нет, схема простейшая. Должно получиться примерно так, чтобы когда подключаете аккумулятор и включаете всю цепь с помощью выключателя, мотор редуктор должен начинать работать. Если всё так, то всё сделано правильно и можно продолжать дальше. Кстати места соединения элементов и места пайки необходимо заизолировать с помощью термо усадки, изоленты или на худой конец с помощью скотча. Кстати скотч имеет очень хорошие изолирующие качества.

Затем берём крышечки от кетчупа, наносим на неё немного супер клея и приклеиваем небольшой кусочек резинки. Потом, поверх резинки, которую приклеили ранее, наносим ещё немного супер клея и приклеиваем ещё один такой же отрезок резинки.
Всё то же самое необходимо проделать и со второй крышкой. Всего должно получиться две заготовки:
В центре заготовок, которые делали ранее необходимо просверлить по одному сквозному отверстию:

Теперь надеваем заготовки на ось вращения редуктора, так как показано на фото ниже. После чего естественно приклеиваем их с помощью термоклея:
Приклеиваем заготовку из мотора редуктора, к заготовке из шпажек и шпателей. Склеивать их вместе необходимо в месте нахождения отрезков трубочек от коктейлей.
После склеивания, мотор редуктор должен свободно двигаться по “рельсам” из шпажек:
Теперь необходимо продеть через верхнюю шпажку, которая соединяет две основные шпажки, небольшой отрезок резинки, после чего два его конца нужно приклеить к мотору редуктору. Делать необходимо всё так, как показано на фото ниже:
Также, на моторе необходимо аккуратно разместить и приклеить выключатель, так, чтобы было удобно включать и выключать “робота”:

Берём аккумулятор и на его заднюю часть приклеиваем двух сторонний скотч. Затем сам аккумулятор приклеиваем на нижнюю часть мотора редуктора и подключаем их с помощью коннектора между собой.
Ну вот и всё! Простой “робот” попрыгунчик готов и осталось его только протестировать. Для этого просто включаем его и ставим на ровную гладкую поверхность. После этого, робот начнет прикольно подпрыгивать вперёд. Самоделка очень интересная и забавная, так что думаю понравится многим.
Вот видео от автора с подробной сборкой и испытаниями данной самоделки:
Ну и всем спасибо за внимание и удачи в будущих проектах!
Источник
Доставка новых самоделок на почтуПолучайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.usamodelkina.ru