Шагающий ev3
Шагающий робот ev3 инструкция
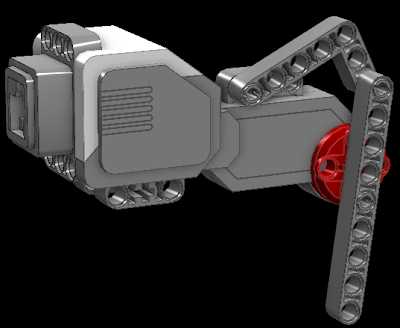
Все чаще в современных соревнованиях по робототехнике используются шагающие роботы lego.При сборке шагающего робота ev 3 подвижные конечности прикрепляются к роботу с помощью гладких серых штифтов, это позволит свободно вращаться конечностям. Мы переведём достаточно простую и вместе с тем надежную и быструю схему шагающего робота ev3, которую можно использовать на соревнованиях таких как робофест.
Инструкция шагающего робота ev3
1
2
3
4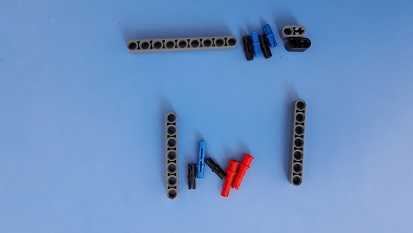
5
6
7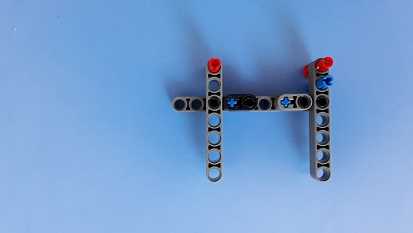
8
9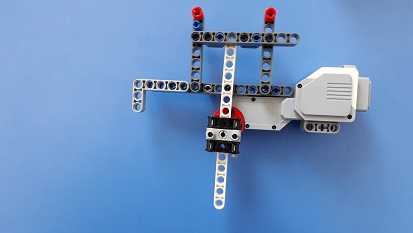
10
11
12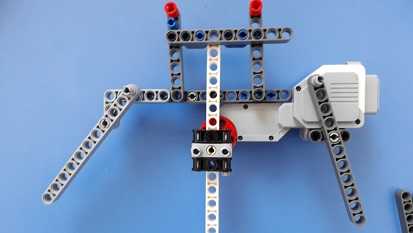
13
Аналогично собирается и крепится другая сторона шагающего робота ev3
14
15
16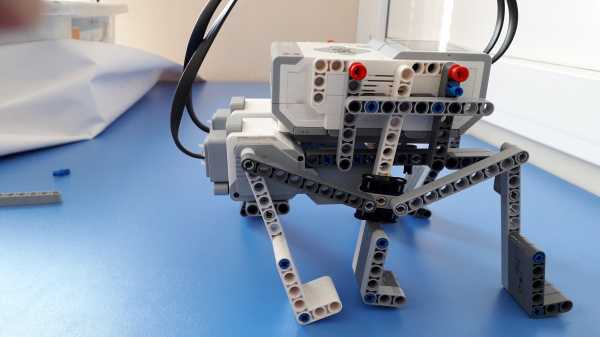
Другие схемы роботов lego ev3
Поделиться:
itrobo.ru
ШАГАЮЩИЙ РОБОТ ИНСТРУКЦИЯ ПО СБОРКЕ Ev3 видео онлайн
Видео:
Здесь вы можете увидеть чемпионат по робосумо. Цель роботов (которые все сделаны из Lego Mindstorms) вытолкнуть
можете скачать проект! в проекте 2 программы! 1-для вездехода без пушки! 2-для вездехода с пушкой!
В клубе “Роботек” г. Астана Краснопёров Данил показывает как за 10 минут собрать шагающего робота Lego Mindst…
Простой в сборке четырехногий робот Василий. Сделан из наборов Lego Education EV3 Mindstors [45544] и [45560] Инструкция …
Инструкция по сборке: google
To get PDF Instructions: me/mechatroni Инструкцию можно получить в телеграме: me/mechatroni Instagram …
Представляю Вашему вниманию HEXAPOD – шагающий робот. Данную модель я просмотрел на канале: …
Роботы для образования LEGO в интернет магазине Олтехно.
Шестиногий шагающий робот собран из LEGO Education [45544]+[45560] по аналогии с …
NiNoXT: Идея для занятия: шагающие роботы. Часть II
| Данная заметка является продолжением цикла статей про проведению занятия по механике роботов. Цель данного занятия – учащиеся по окончании должны уметь конструировать простейших шагающих роботов. Первое часть цикла доступна по этой ссылке. |
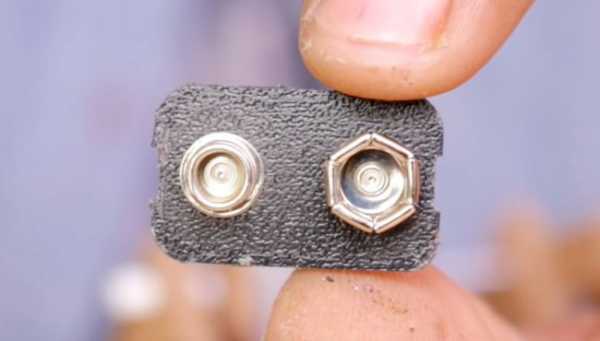
Расскажите учащимся, что благодаря суставам наши конечности могут сгибаться, а благодаря связкам кости нашего скелета скрепляются между собой. А за счет чего в будет обеспечиваться подвижность деталей в роботе, части которого должны свободно изменять свое положение относительно друг друга?
Спросите учащихся, в чем отличаются штифты в каждой паре?
Попросите учащихся в командах соединить каждым штифтом по две балки и проверить вращение балок относительно друг друга. Балки, соединенные какими штифтами, вращаются более свободно?
Сделайте заключение о том, какие штифты наиболее подходящие для подвижных соединений.
Задайте вопрос, какие еще элементы из конструктора учащиеся могут предложить использовать в местах подвижных соединений помимо штифтов?
Часть III. Прототипирование ноги робота.
Пусть каждый из членов команд в своей тетради сделает схематический рисунок для шагающего робота или его части, которая ответственна за шагание. При создании схемы пусть они ориентируются только на детали из существующего комплекта. По завершению, учащиеся должны обговорить внутри команд свои схемы:
- Есть ли отличающиеся предложения по типу перемещения робота? По принципиальному строению педипулятора (pedis – нога, лат., понятие введено по аналогии с манипулятором)?
- Какую траекторию, по их мнению, описывают крайние точки получившихся педипуляторов относительно робота?
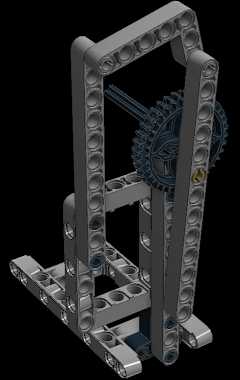
Пусть учащиеся соберут схему подобную следующей:

Попросите привести шестерню в движение посредством оси и спросите, можно ли считать свободную балку, прикрепленную к шестерне прототипом ноги? Что произойдет если внизу под балкой подставить какую-то поверхность? Сможет ли робот опираться на такую ногу? Что не хватает такой конструкции?
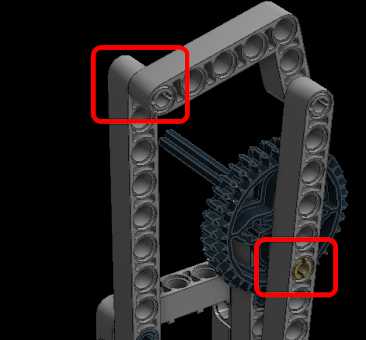
Чтобы добавить такой конструкции “ноги” дополнительную жесткость измените механизм на:
Отметьте, что у такой конструкции балка уже не болтается свободно – она закреплена сверху, что дает ей дополнительный упор. А за счет того, что балка закреплена теперь в двух местах, ее нижний конец теперь строго описывает определенную траекторию.
Объясните, что мы будем считать эту конструкцию первым прототипом ноги. Теперь его нужно перенести на мотор.
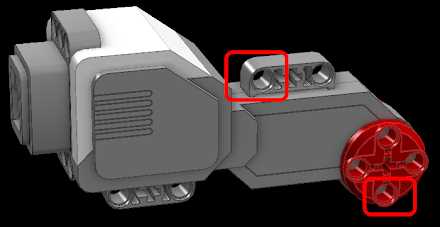
Прежде, чем это сделать попросите учащихся обозначить критические точки в конструкции, какие должны быть потом найдены у мотора.
Если посмотреть на мотор, то у него места для крепления частей педипулятора тоже есть.
Теперь учащиеся должны будут перенести всю конструкцию, необходимую для создания педипулятора, на мотор. Работа должна проходить в парах – каждая пара делает педипулятор на одном моторе. В итоге получится вот такой результат:
Попросите учащихся подключить мотор к контроллеру и на блоке написать программу для движения одного мотора в течении нескольких секунд.

Перенос прототипа на мотор робота удался!
После наблюдения за системой, пусть учащиеся построят в тетради схему этой механической системы, а также проставят размеры. Если какие-то размеры должны быть вычислены, то учащиеся должны расписать процесс вычисления данных величин.
nnxt.blogspot.com
Как сделать шагающего робота-игрушку

The Wrench собрал простого шагающего робота-игрушку. Сейчас посмотрим как он это сделал.
Для того чтобы сделать робота нам понадобится:
1. Фанера
2. Стальная проволока
3. 2 Батарейки типа крона
4. Электрический мотор-редуктор ссылка
5. 2 шестерни (одна поменьше, а другая побольше)
6. Переключатель или кнопка
7. Разъём для кроны
8. Стержень от шариковой ручки
9. Провод

Приступим к созданию самоделки!
1.Вырезаем из фанеры несколько треугольников нужных размеров и сверлим в них отверстия.
2. Вырезаем из фанеры прямоугольник и склеиваем его с двумя треугольниками.
3. Возьмём стальную проволоку, проденем её через отверстие в фанере. Не забываем надеть большую шестерню.
4. Берём 1 крону и избавляем её от контактов при помощи плоскогубцев. Приклеиваем к фанере, а сверху крепим мотор.
5. Отрезаем ещё два куска от стальной проволоки и вставляем в оставшиеся отверстия. Нарезаем 6 небольших прямоугольников из фанеры и крепим их на проволоке. Для лучшего склеивания используем стержень от шариковой ручки.
6. На осях приклеиваем оставшиеся 2 треугольника тем же способом.
7. Паяем провода между переключателем, мотором и разъёмом для кроны. Крепим батарейку.
8. Все детали надёжно заклеиваем и украшаем робота.
9. Покраска и готово.
P.S. Вместо фанеры можно использовать текстолит, плотный картон или пластик.
Источник
 Доставка новых самоделок на почту
Доставка новых самоделок на почтуПолучайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.usamodelkina.ru
Шагающий робот двуногий для различной местности
Шагающий робот с принципиально новой системой стабилизации.
Шагающий робот AnyWalker с новой системой стабилизации может перемещаться в труднопроходимой местности и забираться на препятствия втрое выше габаритов шасси.
Описание
Преимущества
Применение
Технические характеристики
Описание:
Шагающий робот AnyWalker имеет уникальную систему динамической стабилизации, за счет которой он уверенно передвигается на любой поверхности. Шагающий робот с диаметром корпуса от 40 см до 1,5 м передвигается в любой среде, даже не приспособленной для человека, по пересеченной местности. Специальное программное обеспечение позволяет ему прочно удерживаться на земле, на полу, на ступенях даже при подъеме одной ноги.
Система стабилизации подстраивается под различные задачи: встраивается в сервисных роботов, аварийные системы стабилизации транспорта, строительных объектов при землетрясении, устройства уменьшения качки для малых судов, системы позиционирования объектов в космосе, устройства поддержки людей с ограниченными возможностями (силовой экзоскелет, 3D-мобильное инвалидное кресло).
Шагающий робот AnyWalker может выступать в качестве образовательной платформы для обучения механике, программированию, робототехнике, кибернетике и теории управления в кружках, школах, институтах и на предприятиях.
Преимущества:
– перемещение в труднопроходимой местности;
– открытие дверей, поворачивание вентилей, задвижек и нажатие кнопок;
– робот может работать в узких помещениях тамбуров и канализационных коллекторов;
– перемещение по дну водоема и маневрирование в условиях невесомости;
– робот может забираться на препятствия втрое выше габаритов шасси;
– с помощью оригинальной системы стабилизации можно добиваться устойчивости широкого класса конструкций — роботов, съемочных платформ, мультироторных беспилотных летательных аппаратов.
Применение:
– для образования;
– выполнение работ в узких помещениях и условиях труднопроходимой местности;
– автоматизация выполнения задач;
– повышение устойчивости различных конструкций;
– в аварийных системах стабилизации.
Технические характеристики:
| Характеристика: | Значение: |
| Количество ног, шт. | 2 |
| Ортогональные маховики, шт. | 3 |
| Сопротивление опрокидывающему воздействию мощностью, Вт | до 100 |
| Преодоление препятствий, метров в высоту | от 1,5 до 4,5 |
| Расчетная скорость передвижения в режиме шага, км/ч | 5 |
| Расчетная скорость передвижения в режиме качения, км/ч | 10 |
| Время автономного функционирования, часов | 5 |
| Удаленное управление оператором | Имеется |
| Видео- и фотосъемка | Имеется |
Примечание: описание технологии на примере шагающего робота AnyWalker.
карта сайта
lego 70143 mindstorms ev3 шагающий робот инструкция
робототехника боевые шагающие роботы
как сделать сборка схема конструкция механизм инструкция по сборке шагающего робота
тактильное сенсоры антропоморфных сумо стабилизация многоногих шагающих роботов
управление шагающим роботом
вукобратович м шагающие роботы ev3 пошаговая сборка nxt инструкция видео звездные войны и антропоморфные механизмы
двуногий игра конструктор шагающий саблезубый лего робот сэра фангара
шагающий робот своими руками arduino ev3 nxt лего инструкция по по сборке механизм программа lego wedo ардуино игрушка инструкция купить модель сэра фангара
Коэффициент востребованности 282
xn--80aaafltebbc3auk2aepkhr3ewjpa.xn--p1ai
NiNoXT: Идея для занятия: шагающие роботы. Часть III
 | В прошлых двух заметках были перечислены первые несколько частей занятия, посвященному изучению механики шагающих роботов. Данные части готовили учащихся к экспериментальной работе, которая является заключительной на данном занятии. Вместе с теоретической составляющей занятие рассчитано на 3-4 академических часа. |
Часть IV. Первый путь.
Объявите командам, что теперь перед ними стоит задание – собрать робота, который максимально быстро сможет пройти расстояние в 30 см. В ходе задания команды должны провести не меньше 3-х экспериментов, меняя физические характеристики педипуляторов, чтобы определить при каких соотношениях размеров частей педипуляторов, робот движется максимально быстро.
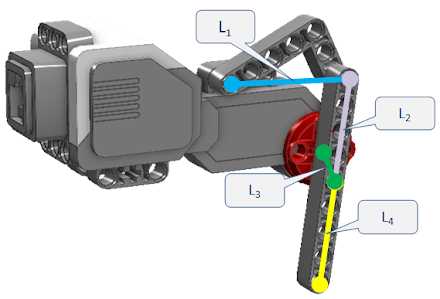
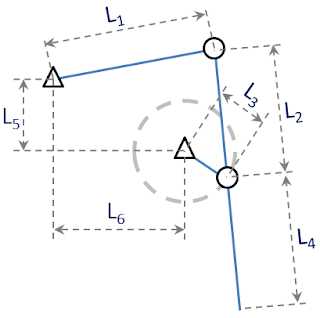
В ходе экспериментов учащиеся должны заполнить таблицу:
Где части педипулятора обозначены следующим образом.
Попросите учащихся перечертить схему механической системы педипулятора еще раз и проставить обозначения ее частей, чтобы избежать путаницы при проведении экспериментов.
Также объявите командам, что они должны собрать из тех прототипов, что у них есть (в ходе работ в предыдущей части занятия в каждой команде должно получиться по две ноги, собранных каждый на своем моторе) робота и запрограммировать его. Мощность на моторах не должна изменяться в ходе экспериментов.
У команд должен получиться робот подобный этому:
В ходе экспериментов команды должны обратить внимание на то, что они делают помимо изменения размеров частей педипулятора, чтобы быть готовыми ответить на следующие вопросы. Ответы должны быть записаны в тетради после проведения всех экспериментов.
- Какое должно было быть расположение педипуляторов друг относительно друга до запуска программы, чтобы робот шагал максимально плавно?
- На каких экспериментах приходилось переделывать помимо педипулятора опорную часть робота, чтобы еще больше повысить его скорость?
- На каких экспериментах приходилось переделывать помимо педипулятора опорную часть робота, чтобы он продолжал сохранять устойчивость?
Перед началом их работы напомните командам о необходимости разбиться на роли, а также провести планирование работ.
До первого запуска робота спросите у учащихся – какое время (или показания энкодера) они выберут для указания в программе, чтобы быть уверенными, что робот пройдет расстояние не меньше 30 см. Как они выбрали это время?
Примеры того, как учащиеся могут изменять размеры частей педипулятора:
Когда задание будет выполнено, обсудите в командах результаты экспериментов.
- Что помогало или мешало двигаться по составленному плану?
- Как бы они описали свои трудности, с которыми пришлось столкнуться при конструировании?
- К чему приводило изменение размера каждой части педипулятора?
- Что влияло на скорость перемещения робота помимо мощности и соотношения размеров частей педипулятора?
- Как бы они изменили конструкцию в следующий раз, чтобы повысить еще больше скорость робота?
nnxt.blogspot.com
План-конспект: Открытый урок на тему “Шагающие механизмы”
Сценарий открытого занятия по теме «Шагающие механизмы»
Цель занятия:
-Развитие критического мышления и творческих способностей
-ознакомление с темой шагающих механизмов
Задачи:
предметные:
– закрепить умения выполнения работы по образцу при конструировании роботов;
– познакомить учащихся с технологией сборки шагающих роботов
-повторить название деталей для сборки шагающего робота
-получить теоретические сведения по отличию шагающих от колесных роботов
-получить практические сведения о сборке конструкции шагающего робота
-получить практические сведения по программированию шагающего робота
личностные
– развивать любознательность, наглядно-логическое мышление, способствовать привитию аккуратности, точности, умению доводить дело до конца;
метапредметные:
– воспитывать интерес к техническому творчеству, умению работать в коллективе.
Вид деятельности:
– конструирование
Метод обучения:
-иллюстративно-объяснительный
-проблемный
-репродуктивный
-проблемное изложение
Форма организации обучения:
– групповая
-индвивидуальная
Педагогические технологии:
ИКТ, технология коллективного взаимообучения, технология сотрудничества.
Формирование УУД (универсальные учебные действия):
Личностные УУД: Развивать любознательность, сообразительность, внимательность, настойчивость, целеустремленность, умения преодолевать трудности.
Познавательные УУД: Ориентироваться в понятиях «Lego – роботы», «конструирование», «программирование», анализировать расположение деталей в роботе, составлять робота из частей.
-получить первоначальные навыки конструирования шагающих роботов
-уметь определять баланс шагающего робота
-знать название деталей для сборки шагающих роботов
-различать виды штифтов и их конструктивные особенности
-уметь выполнять сборку по инструкции
-знать основы программирования программного блока
Коммуникативные УУД: Формировать умения работать индивидуально и в группах, высказывать своё мнение и прислушиваться к мнению других.
Регулятивные УУД: Формировать умение определять цель деятельности на занятии, осуществлять итоговый и пошаговый контроль по результату.
Оборудование и материалы:
(видео к второму заданию)
- ТСО: персональный компьютер, мультимедийный проектор.
План занятия:
1) Организационный этап
– приветствие
– деление детей на группы
– сообщение темы и цели занятия
2) Основной этап
– беседа
– практическая работа
3) Заключительный этап
– выводы
– рефлексия
Подготовительный этап педагога к занятию
На партах подготовлен конструктор для работы, на персональном компьютере установлено ПО для составления программ и находятся инструкции в формате PDF по сборке роботов.
Ход занятия.
1.Организационная часть занятия. Подготовка рабочих мест.
2. Сообщение целей и задач занятия. Ребята, сегодня нам предстоит познакомиться с шагающими механизмами.
3.Сообщение нового материала.
Педагог:
Какие классы роботов существуют, как вы думаете?
Классы роботов:
Манипуляционные, которые в свою очередь делятся на стационарные и передвижные. Манипуляционные роботы – автоматические машины, состоящие из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и устройства программного управления.
Мобильные, которые в свою очередь делятся на колесные, шагающие, гусеничные. А также ползающие, плавающие, летающие. Мобильный робот – автоматическая машина, в которой имеется движущееся шасси с автоматически управляемыми приводами.
Занятие стоит начать с того, чтобы обсудить с учащимися, какие традиционные способы перемещения известны для робототехнических механизмов.
В ходе мозгового штурма рисуйте на доске концептуальную карту, которая может выглядеть в итоге следующим образом:
.
Для ускорения генерации идей мозгового штурма используйте примеры из окружающего нас мира: транспорт, животный мир.
Перед тем, как перейти к следующей части обсуждения можно попросить занимающихся ознакомиться со следующими видео-роликами.
Шагающий робот SHAFT
Следующей частью обсуждения является понимание какие есть преимущества и недостатки у колесных механизмов и какие у шагающих.
Выводы обсуждения могут быть следующими:
Колесные роботы:
Преимущества | Недостатки |
более простая конструкция | небольшая эффективность в неподготовленной среде |
более высокая скорость перемещения в подготовленной среде | влияние на окружающую среду (оставляют за собой непрерывную колею, тратя на это большую энергию) |
Шагающие роботы:
Преимущества | Недостатки |
может перемещаться в большинстве ландшафтов | сложное управление для обеспечения стабилизации (моноподы, биподы) |
может функционировать в той же среде, где и человек | либо |
малое влияние на окружающую среду (взаимодействие с грунтом происходит только в местах упора стопы) | сложность конструкции, большое количество моторов (гексаподы) |
Компоненты робота: из каких деталей состоят шагающие роботы?
Посмотрите ребята внимательно и ответьте на следующий вопрос: По какому признаку объедены эти роботы? (у них у всех есть ноги) Как мы назовем эту группу роботов? (шагающие роботы). Для чего нужны шагающие роботы в жизни? В таких механизмах есть практическая необходимость. Вспомните хотя бы забуксовавшие колесные машины – эту частую картину при бездорожье. Шагающие механизмы лучше преодолевают препятствия, и в этом их главное преимущество. Шагающие роботы могут передвигаться по пересеченной местности недоступной для обычных колесных средств. Примерно 70% земной поверхности недоступны для транспортных средств, созданных руками человека. Колесо — блестящее изобретение, для его эффективного использования нужна гладкая опорная поверхность. Сравнив колеса с ногами, нетрудно заметить, что при движении колеса не контролируется происходящее в точках соприкосновения его с поверхностью: нагрузка просто прикладывается к следующим один за другим участкам дороги. Шагающее существо в состоянии само выбирать точки контакта ноги с поверхностью и учитывать ее неровности. При наличии гладкой твердой дорожной поверхности колесо, безусловно, служит основой наиболее эффективных средств передвижения. Когда же дело касается естественной земной поверхности, которая, как правило, изобилует неровностями, колесо во многих случаях оказывается абсолютно бесполезным — и здесь побеждают ноги. Конструкции двуногих роботов редки, так как требуют для осуществления сложных инженерных решений. Создать двуного робота и заставить его эффективно перемещаться – задачка, над которой трудятся тысячи специалистов по всему миру. Уже сделан бегающий робот – андройд Asimo и множество его аналогов Робот Alpha Rex, рекламируемый компанией Lego тоже может перемещаться на двух ногах, но ходьбой это можно назвать с натяжкой. Расскажите учащимся, что благодаря суставам наши конечности могут сгибаться, а благодаря связкам кости нашего скелета скрепляются между собой. А за счет чего в будет обеспечиваться подвижность деталей в роботе, части которого должны свободно изменять свое положение относительно друг друга? Предложите командам найти следующие штифты в коробках своих робототехнических наборов.
В командах обучающимся нужно предложить соединить каждым штифтом по две балки и проверить вращение балок относительно друг друга. Балки, соединенные какими штифтами, вращаются более свободно?
|
4.Планирование деятельности. Вы узнали о роботах и робототехнике. Сейчас я предлагаю вам поработать с конструктором.
5.Практическая работа. Обучающиеся работают над созданием своего робота. Описывают его технические характеристики.
Учащиеся разбиваются на группы по два человека. Предлагаются наборы конструкторов Lego Mindstorms NXT 2.0:собрать модель с использованием полной инструкции(инструкция приведена выше).
Все роботы строятся по следующим принципам:
– робот должен стоять на поверхности (полигоне), упираясь только на «ноги»;
– «ноги» робота приводятся в движение одним мотором;
– движение «ног» должно быть возвратно-поступательным;
– центр тяжести робота должен быть смещен вперед по ходу движения.
После сборки модели ставится задача разработки тестирующей программы (слайд № 22):
– использовать блок «Цикл», сконфигуровать его как бесконечный цикл;
– использовать блок «Движение» внутри бесконечного цикла;
– настроить блок, выбрав двигатель А, направление движения вперед, уровень мощности 50%, длительность движения – бесконечность.
Задание 1.
Пусть каждый из членов команд в своей тетради сделает схематический рисунок для шагающего робота или его части, которая ответственна за шагание. При создании схемы пусть они ориентируются только на детали из существующего комплекта. По завершению, учащиеся должны обговорить внутри команд свои схемы:
- Есть ли отличающиеся предложения по типу перемещения робота? По принципиальному строению педипулятора (pedis – нога, лат., понятие введено по аналогии с манипулятором)?
- Какую траекторию, по их мнению, описывают крайние точки получившихся педипуляторов относительно робота?
Обсудите получившиеся схемы. Могут ли учащиеся предложить еще варианты после обсуждения?
Пусть учащиеся соберут схему подобную следующей:
Попросите привести шестерню в движение посредством оси и спросите, можно ли считать свободную балку, прикрепленную к шестерне прототипом ноги? Что произойдет если внизу под балкой подставить какую-то поверхность? Сможет ли робот опираться на такую ногу? Что не хватает такой конструкции?
Чтобы добавить такой конструкции “ноги” дополнительную жесткость измените механизм на:
Отметьте, что у такой конструкции балка уже не болтается свободно – она закреплена сверху, что дает ей дополнительный упор. А за счет того, что балка закреплена теперь в двух местах, ее нижний конец теперь строго описывает определенную траекторию.
Снова добавьте поверхность под нижний конец балки. Что происходит во время вращения шестерни?
Объясните, что мы будем считать эту конструкцию первым прототипом ноги. Теперь его нужно перенести на мотор.
Прежде, чем это сделать попросите учащихся обозначить критические точки в конструкции, какие должны быть потом найдены у мотора.
Если посмотреть на мотор, то у него места для крепления частей педипулятора тоже есть.
Теперь учащиеся должны будут перенести всю конструкцию, необходимую для создания педипулятора, на мотор. Работа должна проходить в парах – каждая пара делает педипулятор на одном моторе. В итоге получится вот такой результат:
Попросите учащихся подключить мотор к контроллеру и на блоке написать программу для движения одного мотора в течении нескольких секунд.
Перенос прототипа на мотор робота удался!
Задание 2.
Объявите командам, что теперь перед ними стоит задание – собрать робота, который максимально быстро сможет пройти расстояние в 30 см. В ходе задания команды должны провести не меньше 3-х экспериментов, меняя физические характеристики педипуляторов, чтобы определить при каких соотношениях размеров частей педипуляторов, робот движется максимально быстро.
В ходе экспериментов учащиеся должны заполнить таблицу:
Где части педипулятора обозначены следующим образом.
Попросите учащихся перечертить схему механической системы педипулятора еще раз и проставить обозначения ее частей, чтобы избежать путаницы при проведении экспериментов.
Также объявите командам, что они должны собрать из тех прототипов, что у них есть (в ходе работ в предыдущей части занятия в каждой команде должно получиться по две ноги, собранных каждый на своем моторе) робота и запрограммировать его. Мощность на моторах не должна изменяться в ходе экспериментов.
У команд должен получиться робот подобный этому:
В ходе экспериментов команды должны обратить внимание на то, что они делают помимо изменения размеров частей педипулятора, чтобы быть готовыми ответить на следующие вопросы. Ответы должны быть записаны в тетради после проведения всех экспериментов.
- Какое должно было быть расположение педипуляторов друг относительно друга до запуска программы, чтобы робот шагал максимально плавно?
- На каких экспериментах приходилось переделывать помимо педипулятора опорную часть робота, чтобы еще больше повысить его скорость?
- На каких экспериментах приходилось переделывать помимо педипулятора опорную часть робота, чтобы он продолжал сохранять устойчивость?
Перед началом их работы напомните командам о необходимости разбиться на роли, а также провести планирование работ.
До первого запуска робота спросите у учащихся – какое время (или показания энкодера) они выберут для указания в программе, чтобы быть уверенными, что робот пройдет расстояние не меньше 30 см. Как они выбрали это время?
Примеры того, как учащиеся могут изменять размеры частей педипулятора:
Когда задание будет выполнено, обсудите в командах результаты экспериментов.
- Что помогало или мешало двигаться по составленному плану?
- Как бы они описали свои трудности, с которыми пришлось столкнуться при конструировании?
- К чему приводило изменение размера каждой части педипулятора?
- Что влияло на скорость перемещения робота помимо мощности и соотношения размеров частей педипулятора?
- Как бы они изменили конструкцию в следующий раз, чтобы повысить еще больше скорость робота?
После сборки роботов. Происходит испытание роботов на поле и отладка конструкции робота и программы. Дополнительное задание (проблемные вопросы): 1. Предложите учащимся использовать вместо прямых балок в педипуляторе изогнутые. Попросите провести несколько экспериментов и в тетради записать как изменился характер перемещения робота, что они изменяли в конструкции, чтобы сделать перемещение более эффективным. Пример изменения конструкции педипулятора.
|
6.Заключительня часть. Подведение итогов занятия. Определение задач на будущее.
nsportal.ru