Инструкции по созданию простых роботов своими руками:
Этот раздел сайта посвящен пошаговым инструкциям с фото и видео по созданию простых роботов их подручных материалов в домашних условиях. Как сделать простейшего beam робота или виброробота своими руками, схемы роботов для начинающих робототехников, основы и уроки робототехники для начинающих. Самый простой робот своими руками, как сделать простого робота в домашних условиях, поэтапные пошаговые схемы по сборке простейших beam (бим) и вибро роботов. Создание простого робота для детей или начинающих робототехников. Уроки робототехники для начинающих о том, как сделать очень простого робота дома в домашних условиях:
library_books Подборки: DIY: Подводный дрон с видеокамерой своими руками. Пошаговая инструкцияВ этой инструкции показано как сделать подводный дрон из пвх труб с управлением с помощью пульта и с видеокамерой на борту.
Доступно только зарегистрированным пользователям
schedule 27.05.2013 favorite_borderДоступно только зарегистрированным пользователям
DIY: Простейший робот Buck. Пошаговая инструкция по созданиюДоступно только зарегистрированным пользователям
schedule 27. 11.2012 favorite_border
11.2012 favorite_borderДоступно только зарегистрированным пользователям
Представляем интересный механизм – робот Lobsterbot. Особенность данного устройства заключается в его простоте. Всё, что нужно для управления – это чип и реле. По принципу движения робот напоминает рака – отсюда и название: Lobsterbot. С помощью этого робота можно познать азы построения умных роботов, которые пригодятся для дальнейших исследований в области робототехники…
schedule 01.11.2012 favorite_borderДоступно только зарегистрированным пользователям
Боевые роботы Battle Bot, как правило, довольно интересные и разнообразные. Мы представляем вам инструкцию одного мини-робота Battle Bot, который небольшой, очень легкий и простой в создании. Вы его можете собрать в любое свободное и удобное для вас время. Он не требует дорогостоящих деталей и инструментов. Так что, приступим…
Мы представляем вам инструкцию одного мини-робота Battle Bot, который небольшой, очень легкий и простой в создании. Вы его можете собрать в любое свободное и удобное для вас время. Он не требует дорогостоящих деталей и инструментов. Так что, приступим…
Этот очень простой робот может быть сделан из недорогих материалов, которые можно купить в обычном магазине. Основой данного устройства является старая компьютерная мышка.Mousebot – простой бот реагирующий на свет и при столкновении со стеной способный двигаться назад и поворачивать в другую сторону. Данный проект является довольно дешевым, если у вас есть старая мышь в наличии…
schedule 18.
Доступно только зарегистрированным пользователям
DIY: Bristlebot — простой светочувствительный виброробот. Пошаговая инструкция по созданиюЧто такое робот- bristlebot? Это вибрирующий робот, построенный на основе зубной щетки. Но если вас не устраивает такой простой вариант вибробота на зубной щетке, предлагаем добавить дополнительные особенности, которые не требуют ни дорогих технологий, ни программирования. Например, ваш робот смог бы реагировать на свет. Это достижимо с помощью специального сенсора…
schedule 30.07.2012Доступно только зарегистрированным пользователям
schedule 30.07.2012 favorite_borderДоступно только зарегистрированным пользователям
DIY: Трехголовый робот на основе из CD-диска. Пошаговая инструкция по созданию
Пошаговая инструкция по созданиюМы не раз уже писали о роботах, построенных на основе зубной щетки. Но этот интересный робот заинтересует любого желающего попробовать свои силы в построении самодельных домашних роботов. Его создание может занять всего пару часов. Для этого нужно сосредоточиться на деле и следовать инструкции. Робота должна проводиться в хорошо проветриваемом помещении…
Доступно только зарегистрированным пользователям
DIY: Легкий виброробот из старого фотоаппарата. Пошаговая инструкция по созданиюДля того, чтобы создать виброробота не обязательно нужны зубные щетки. Эти устройства создаются легко из старых нерабочих вещей, как например, фотоаппарат. Кроме фотоаппарата для построения робота понадобится немного скотча и несколько долларов. Если у вас есть старый поломанный и ненужный фотоаппарат, можете смело приступать к конструкции этого робота.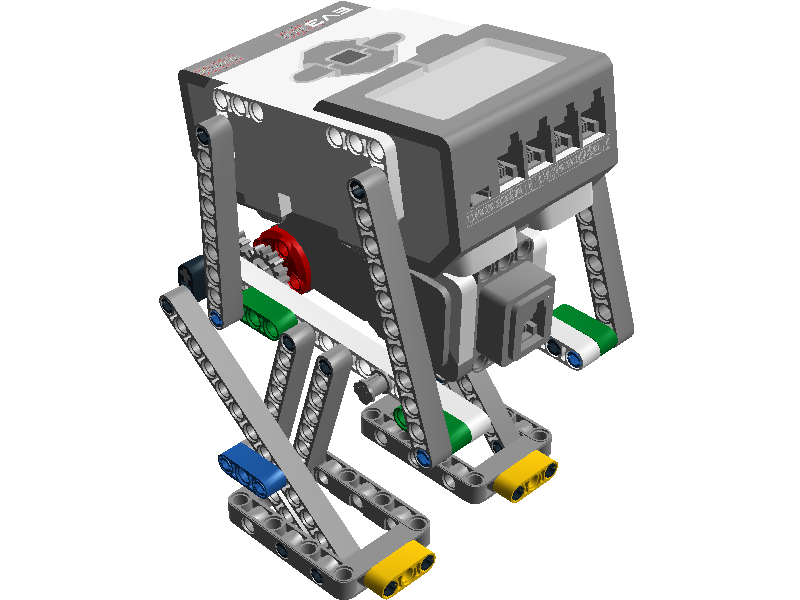
Доступно только зарегистрированным пользователям
DIY: Вибрирующий робот-насекомое из жестяной банки. Пошаговая инструкция по созданиюПредставляем вам вибрирующий робот на основе жестяной банки из-под газированного напитка, который гудит, как насекомое и двигается сам по себе. Легкая конструкция с множеством возможностей для детей, чтобы научиться делать робота самостоятельно. Этот виброробот очень хорошо работает на кафельном полу, где он следует и опирается на плитке, когда его нога застревает в щели. В зависимости от того, насколько он сбалансирован, он будет двигаться по комнате, и станет отличной забавой для молодежи…
Доступно только зарегистрированным пользователям
В этом разделе вы можете найти схемы и собрать простого робота, маленьких простейших роботов, иными словами этот раздел это робототехника для начинающих своим руками в домашних условиях.
Так же здесь есть инструкции по сборке beam роботов (бим роботов) и вибророботов своими руками. Описание процесса создания простейших роботов, фото и видео инструкции по о том как начать делать простого робота.
Смотреть инструкции и схемы очень простых роботов, которых можно сделать в домашних условиях из подручных материалов. Очень простые и самые простые роботы для самостоятельного изготовления. Делаем простейшего робота дома в домашних условиях своими руками.
Каталог DIY-проектов роботов | Занимательная робототехника
Ищете, что бы смастерить? Не хватает идей для вдохновения? Хотите узнать о самых необычных самодельных роботах со всего мира? «Занимательная робототехника» представляет каталог DIY-проектов роботов для всех.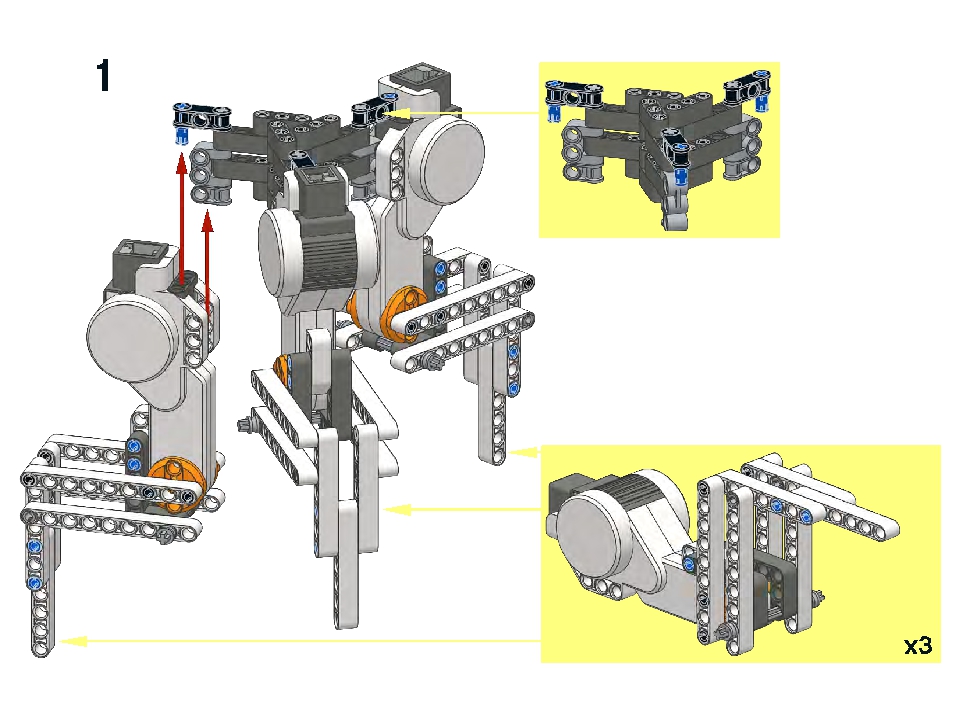
DIY — Do It Yourself или «сделай сам» — популярное направление технического творчества. Мы собираем самые интересные проекты, даем краткие описания на русском языке, список необходимых компонентов, подбираем фото и видео. Если вас заинтересует проект, то узнать о нем подробнее, найти исчерпывающие инструкции, программный код и т.п. вы можете на соответствующем сайте.
В нашем каталоге робототехнических проектов удобный поиск по платформам: Arduino, Lego Mindstorms, Raspberry Pi и другим. Все проекты нашего каталога можно реализовать дома. Проекты рассчитаны на разные уровни сложности.
После задания поисковых условий нажмите кнопку «Найти проекты» для обновления списка.
Список проектов:
- Говорящий робот-пылесос. Универсальное улучшение на Arduino
- Шагающая тыква. Arduino-робот для Хэллоуина
- Sourino — самодельная роботизированная мышь
- Двуногий робот из Arduino, LEGO и деталей 3D печати
- Шестиногий шагающий робот из Arduino, LEGO и деталей 3D печати
- Робот полицейский из Lego WeDo 2.
 0
0 - Умный миксер из Lego WeDo 2.0
- Дрон из LEGO WeDo 2.0
- Модель Lego WeDo 2.0 «Наземная станция»
- Робот-художник на базе Arduino Uno
- Самодельный робот-собака Spot Micro
- LEGO EV3 робот-художник
- Сферический четвероногий робот Arduino
- Виртуальная игра, управляемая настоящим велосипедом (Arduino)
- Четверногий Arduino-робот mechDOG
- Велосипед, подключенный к Google Street View через Arduino
- Самодельный таймер мытья рук на основе Arduino
- Учебный набор начинающего ситифермера
- SpinnerBot из LEGO Mindstorms
- LegoGun — двуствольный пистолет из Lego Mindstorms EV3
- Движущийся по линии робот из LEGO WeDo 2.0
- Спирограф — рисующий робот из LEGO Mindstorms EV3
- Бесполезная коробка из Lego Mindstoms EV3
- Гексапод из Lego Mindstorms EV3
- Робот из компьютерной мышки
- Робот Бабочка для демонстрации систем управления в робототехнике
- Робот на Arduino, управляемый с помощью жестов
- Птеродактиль из LEGO WeDo 2. 0
- Роботизированная рука из Lego Mindstorms EV3
- Шредер из LEGO
- Подъемные механизмы из LEGO Mindstorms
- Как сделать аниматронный хвост
- Вездеход из Lego с видео и bluetooth на Raspberry Pi
- Робот T-800 Джон Генри
- Робот-шахматист на базе Raspberry Pi
- Робот Juno: изучай Arduino и программирование
- Робот-манипулятор из настольной лампы IKEA
- Arduino-робот, объезжающий препятствия
- Роботизированная интеллектуальная система — РИС
- Прибор автоматической подачи одноразовых стаканчиков из LEGO Mindstorms
- Робот из мультсериала «Рик и Морти»
- Серво-выключатель света для умного дома
- Робот-рыба на Arduino
- Сделай сам большого человекоподобного робота
- Робот-кабан-динозавр DINOR3X из LEGO Mindstorms EV3
- Znap — робот из LEGO Mindstorms EV3
- Робот-сортировщик (Color Sorter) из LEGO Mindstorms EV3
- Робот Educator Vehicle из LEGO Mindstorms EV3
- Робот-сигвей (Gyro Boy) из Lego Mindstorms
- Робот-манипулятор Arm h35 из LEGO Mindstorms
- Робот-гексапод NXTAPOD из LEGO Mindstorms. Модель Даниэля Бенедеттелли
- Робот-щенок (Puppy) из LEGO Mindstorms EV3
- Лимоноид — робот, продающий напитки
- Сноуборд в виртуальной реальности с Arduino и Google Cardboard
- Киноаппарат из Lego Mindstorms
- Open Source проект робота на Arduino
- Принтер из Lego Mindstorms «STALKER ver. 2.0»
- Робот-пожарный из LEGO Mindstorms
- Робот-компаньон на основе Arduino и Android-смартфона
- Робот миньон из яйца от Kinder-сюрприза и Arduino
- Робот-собака на Arduino
- Робот WALL-E на Arduino
- Робот на колесах с механизмом зацепа
- Шагающий робот из Поликапролактона (Полиморфуса)
- Крестики-нолики — ARBUZIKI-TEAM
- EZ Wilber — говорящий балансирующий робот из Lego Mindstorms
- Ev3 Print3rbot — робот-художник из Lego Mindstorms
- Робот, собирающий кубик Рубика
- Робот-Железяка 1, управляемый по Bluetooth
- Brave robot. Чувствительный к свету BEAM-робот
- 3D-принтер из Lego печатает шоколадом
- Собирай кубик Рубика с Arduino UNO
- ArGo — автомобиль из конструктора Lego Technic и Arduino
- Собака «Тузик» из Lego WeDo
- Arduino робот-сортировщик Skittles, напечатанный на 3D-принтере
- Полноразмерный робот T-800 из фильма Терминатор
- Управляемая машина из Lego WeDo
- Робот Гадкий утенок
- Машина на пружинах из Lego WeDo
- Робот-шлем для чистки зубов
- Гоночная машина из Lego Wedo
- Noodlebot — шагающий робот на базе Arduino
- Рекламный промо робот WayBot на Raspberry Pi
- Робот телеприсутствия из arduino и нетбука
- Lego Mindstorms NXT 2.0 играет в шахматы
- Arduino-робот жук Ringo
- Робот-гексапод из Lego Mindstorms NXT 2. 0
- Cannybots — open source роботы-игрушки
- Arduino-Lego танк
- Позитивный DIY-гуманоид
- Робот для игры в воздушный хоккей из частей для 3D принтера
- Arduino драм машина (Yellow Drum Machine)
- Робот-гуманоид Halley: Ambassador Robot 001
- Робоноги из Lego Mindstorms
- Lego Mindstorms-экскаватор, управляемый Microsoft Kinect
- MobBob — шагающий робот-смартфон
- PopPet — оригинальный образовательный робот
- Робот, рисующий по фотографии
- Робот R2D2, напечатанный на 3D-принтере
- Робот, танцующий как Майкл Джексон
- Запускай кофе-машину, используя Twitter
- Drogerdy — танк, управляемый Raspberry Pi
- Lego-робот DIZZ3
- Робо-рука LittleBits
- Часы — роботизированная рука
- Cambot — робот-фотограф на Raspberry Pi
- Сундучок на Raspberry Pi, который распознает ваше лицо
- Крестики-нолики для Lego-робота
- Управляй телевизором силой мысли и Arduino
- О’кей Google, Сезам, открой дверь
- Марсоход, напечатанный на 3D-принтере
- Lego Mindstorms EV3 3D-принтер 2. 0
- Шагающий робот из палочек от мороженого
 0
0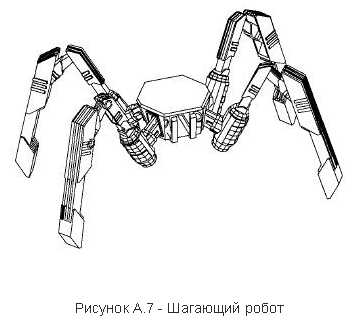 0
0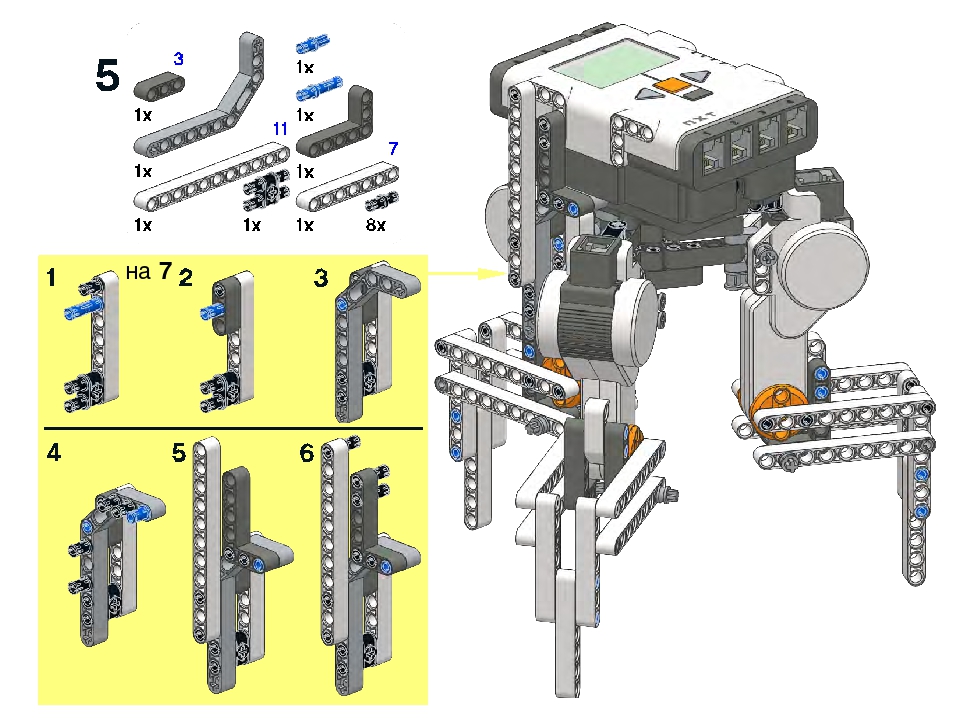 Модель Даниэля Бенедеттелли
Модель Даниэля Бенедеттелли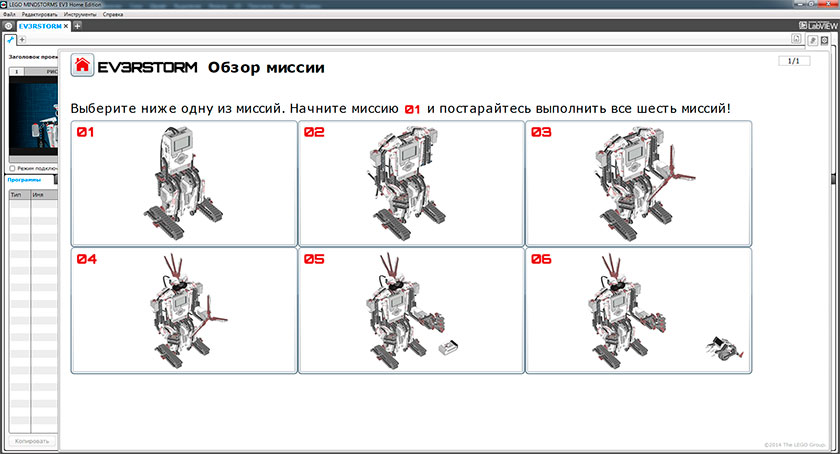 Чувствительный к свету BEAM-робот
Чувствительный к свету BEAM-робот 0
0 0
0Учебный проект “Шагающие механизмы” – sait
Lego Mindstormes NXT 2.0
Аннотация:
Робототехника — прикладная наука, занимающаяся разработкой автоматизированных технических систем. Робототехника опирается на такие дисциплины как электроника, механика, программирование.
LEGO Mindstorms — это конструктор (набор сопрягаемых деталей и электронных блоков) для создания программируемого робота (Приложение №1). Впервые представлен компанией LEGO в 1998 году. Конструкторы LEGO Mindstorms позволяют организовать учебную деятельность по различным предметам и проводить интегрированные занятия. С помощью этих наборов можно организовать высокомотивированную учебную деятельность по пространственному конструированию, моделированию и автоматическому управлению.
Цели проекта:
– Ознакомление с робототехникой с помощью LEGO Mindstorms NXT 2. 0.
0.
– Коллективная выработка идей, упорство при реализации некоторых из них.
– Научиться программировать роботов с помощью программы Mindstorms.
– Создание робота, как по схеме, так и собственного.
Задачи проекта:
– Ориентация человека на новые технологии и методы в сферах роботостроения и кибернетики;
– Активное самообразование и формирование творческой личности;
– Освоение навыков коллективного труда;
– Формирование навыков современного конструирования роботов.
Участники проекта:
Учащиеся 5-11 классов
Место проведения:
Лицей №7, кабинет информатики
Этапы и сроки выполнения
Одна неделя+одна неделя на оформление результатов+5 дней на голосование и подведение итогов
I этап (подготовительный)
1. “Старт проектной работы” (презентация проекта).
2. “Мозговой штурм” (создание групп, распределение ролей).
“Мозговой штурм” (создание групп, распределение ролей).
Подготовительный этап проводится на последних уроках информатики в неделю у класса. То есть, у кого-то это было в пятницу, у кого-то в субботу. На уроке показывается презентация проекта, затем учащиеся распределяют роли и обязанности.
В качестве среды для совместного редактирования документов предлагается использовать “Документы Google“. На последних уроках информатики учащиеся всех классов создают свои аккаунты в Google, знакомятся с возможностями совместного редактирования текстовых файлов и презентаций, создают простейшие документы и предоставляют доступ друг другу в парах и учителю.
II этап (конструирование)
1. Конструирование по неполной инструкции “Двуногого шагающего робота с одним мотором”
Описание модели:
Наиболее подходящим для начального
изучения представляется шагающий двуногий робот.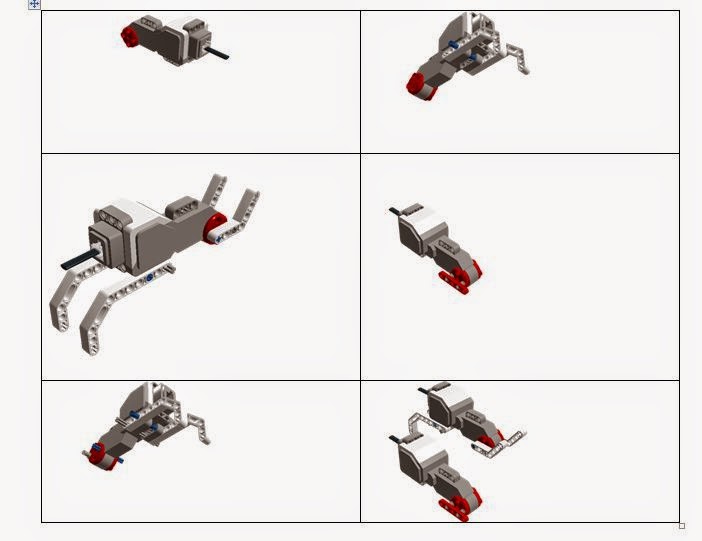 Робот на двух ногах устойчив.
При правильной сборке он будет двигаться по прямой линии. Его первая задача
проста – идти вперед.
Робот на двух ногах устойчив.
При правильной сборке он будет двигаться по прямой линии. Его первая задача
проста – идти вперед.
Описание конструкции:
- механизм должен стоять на поверхности, упираясь на две конечности, каждая из которых не может совершать вращательное движение вокруг одного из центров;
- движение конечностей должно быть возвратно-поступательным;
- в конструкции робота запрещено использование колес, соприкасающихся с поверхностью земли;
- конечности робота приводятся в движение одним мотором;
- мотор присоединен к источнику питания;
- центр тяжести робота должен быть смещен вперед по ходу движения.
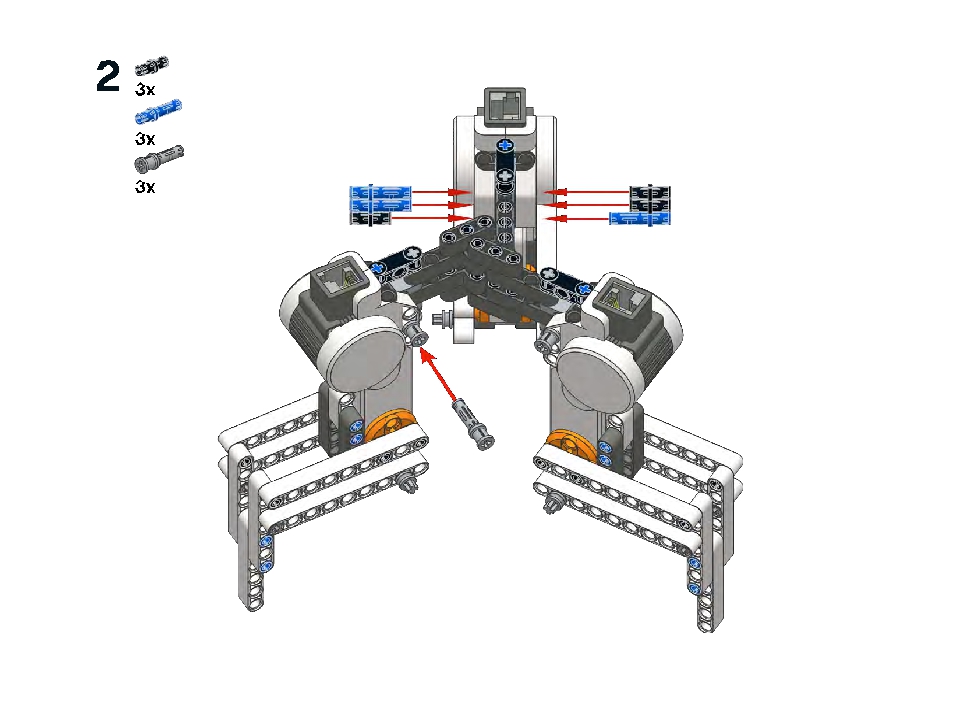
Процесс сборки модели:
Произвести сборку модели по рисункам таблицы №1:
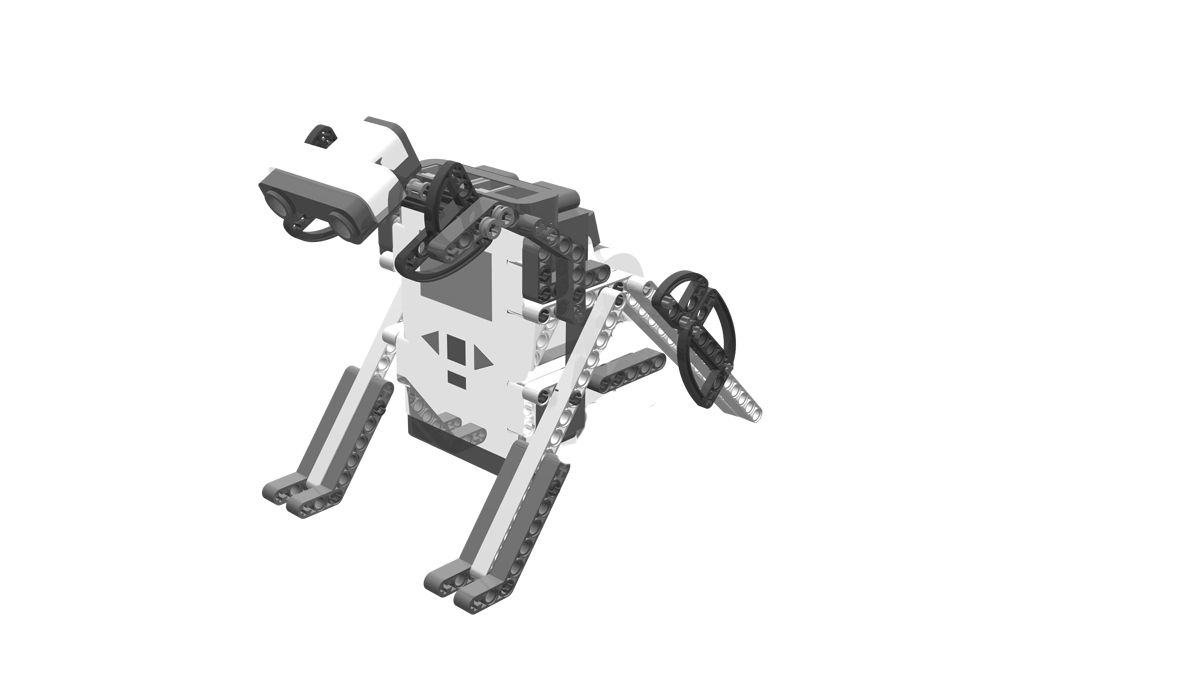
2. Конструирование по неполной инструкции “Четвероногого шагающего робота с одним мотором”
Описание модели:
Наиболее подходящим для начального изучения представляется шагающий четвероногий робот. Робот на четырех ногах устойчив. При правильной соединении он будет двигаться по прямой линии, слегка притопывая. Его первая задача проста – идти вперед.
Робот на четырех ногах устойчив. При правильной соединении он будет двигаться по прямой линии, слегка притопывая. Его первая задача проста – идти вперед.
Описание конструкции:
- механизм должен стоять на поверхности, упираясь на четыре конечности, каждая из которых не может совершать вращательное движение вокруг одного из центров;
- движение конечностей должно быть возвратно-поступательным;
- в конструкции робота запрещено использование колес, соприкасающихся с поверхностью земли;
- конечности робота приводятся в движение одним мотором;
- мотор присоединен к источнику питания;
- центр тяжести робота должен быть смещен вперед по ходу движения.
Процесс сборки модели:
Произвести сборку модели по рисункам таблицы №2:
3. Конструирование по неполной инструкции “Шестиногого шагающего робота с одним мотором”
Описание модели:
Наиболее подходящим для начального изучения представляется шагающий шестиногий робот. Робот на шести ногах устойчив. При движении вперед робот движется прямо, а при движении назад выполняется разворот. При использовании совместно с сенсором расстояния, это позволяет роботу обходить возникающие препятствия.
Робот на шести ногах устойчив. При движении вперед робот движется прямо, а при движении назад выполняется разворот. При использовании совместно с сенсором расстояния, это позволяет роботу обходить возникающие препятствия.
Описание конструкции:
- механизм должен стоять на поверхности, упираясь на шесть конечностей, каждая из которых не может совершать вращательное движение вокруг одного из центров;
- движение конечностей должно быть возвратно-поступательным;
- в конструкции робота запрещено использование колес, соприкасающихся с поверхностью земли;
- конечности робота приводятся в движение одним мотором;
- мотор присоединен к источнику питания;
- центр тяжести робота должен быть смещен вперед по ходу движения.
Процесс сборки модели:
Произвести сборку модели по рисункам таблицы №3:
III этап (итоговое конструирование)
 youtube.com/embed/wqPp7GIk7dg?rel=0&wmode=opaque” frameborder=”0″ allowfullscreen=”true”>
youtube.com/embed/wqPp7GIk7dg?rel=0&wmode=opaque” frameborder=”0″ allowfullscreen=”true”>
IV этап
Шагающий робот двуногий для различной местности
Шагающий робот с принципиально новой системой стабилизации.
Шагающий робот AnyWalker с новой системой стабилизации может перемещаться в труднопроходимой местности и забираться на препятствия втрое выше габаритов шасси.
Описание
Преимущества
Применение
Технические характеристики
Описание:
Шагающий робот AnyWalker имеет уникальную систему динамической стабилизации, за счет которой он уверенно передвигается на любой поверхности. Шагающий робот с диаметром корпуса от 40 см до 1,5 м передвигается в любой среде, даже не приспособленной для человека, по пересеченной местности. Специальное программное обеспечение позволяет ему прочно удерживаться на земле, на полу, на ступенях даже при подъеме одной ноги.
Система стабилизации подстраивается под различные задачи: встраивается в сервисных роботов, аварийные системы стабилизации транспорта, строительных объектов при землетрясении, устройства уменьшения качки для малых судов, системы позиционирования объектов в космосе, устройства поддержки людей с ограниченными возможностями (силовой экзоскелет, 3D-мобильное инвалидное кресло).
Шагающий робот AnyWalker может выступать в качестве образовательной платформы для обучения механике, программированию, робототехнике, кибернетике и теории управления в кружках, школах, институтах и на предприятиях.
Преимущества:
– перемещение в труднопроходимой местности;
– открытие дверей, поворачивание вентилей, задвижек и нажатие кнопок;
– робот может работать в узких помещениях тамбуров и канализационных коллекторов;
– перемещение по дну водоема и маневрирование в условиях невесомости;
– робот может забираться на препятствия втрое выше габаритов шасси;
– с помощью оригинальной системы стабилизации можно добиваться устойчивости широкого класса конструкций — роботов, съемочных платформ, мультироторных беспилотных летательных аппаратов.
Применение:
– для образования;
– выполнение работ в узких помещениях и условиях труднопроходимой местности;
– автоматизация выполнения задач;
– повышение устойчивости различных конструкций;
– в аварийных системах стабилизации.
Технические характеристики:
| Характеристика: | Значение: |
| Количество ног, шт. | 2 |
| Ортогональные маховики, шт. | 3 |
| Сопротивление опрокидывающему воздействию мощностью, Вт | до 100 |
| Преодоление препятствий, метров в высоту | от 1,5 до 4,5 |
| Расчетная скорость передвижения в режиме шага, км/ч | 5 |
| Расчетная скорость передвижения в режиме качения, км/ч | 10 |
| Время автономного функционирования, часов | 5 |
| Удаленное управление оператором | Имеется |
| Видео- и фотосъемка | Имеется |
Примечание: описание технологии на примере шагающего робота AnyWalker.
карта сайта
lego 70143 mindstorms ev3 шагающий робот инструкция
робототехника боевые шагающие роботы
как сделать сборка схема конструкция механизм инструкция по сборке шагающего робота
тактильное сенсоры антропоморфных сумо стабилизация многоногих шагающих роботов
управление шагающим роботом
вукобратович м шагающие роботы ev3 пошаговая сборка nxt инструкция видео звездные войны и антропоморфные механизмы
двуногий игра конструктор шагающий саблезубый лего робот сэра фангара
шагающий робот своими руками arduino ev3 nxt лего инструкция по по сборке механизм программа lego wedo ардуино игрушка инструкция купить модель сэра фангара
Коэффициент востребованности 730
Робофишки
Раздел 1. Вводное занятие. (3 часа)
Теория (1 ч): Инструктаж по технике безопасности. Что такое робототехника. Знакомство с образовательным конструктором ТЕХНОЛАБ. Способ крепления деталей. Просмотр презентации «Роботы в нашей жизни»
Что такое робототехника. Знакомство с образовательным конструктором ТЕХНОЛАБ. Способ крепления деталей. Просмотр презентации «Роботы в нашей жизни»
Практика(2 ч): Сборка конструкций «Улитка», «Фотоаппарат».
Раздел 2. Простые механизмы. (8)
Теория (1 ч): Повторение и закрепление знаний о компонентах конструктора ТЕХНОЛАБ.
Практика (7 ч): Сборка конструкций «Пчела», «Бабочка», «Мельница», «Подводная лодка», «Лебедь», «Белка», «Пингвин».
Раздел 3 Ходовая часть.(8)
Теория (1 ч): Транспорт. Его виды. Ременная передача.
Практика (7 ч): Сборка конструкций «Велосипед», «Легковой автомобиль», «Грозовик», «Самоходные санки», «Бульдозер», «Самолет», «Танк»
Раздел 4. Шагающий робот (8)
Теория (1 ч): Собираем четырехногого робота.
Практика (7 ч): Сборка конструкций «Кролик», «Черепаха», «Брахиозавр», «Трицератопс», «Олень», «Краб», «Муравей»
Раздел 5. Итоговая работа по образовательному конструктору ТЕХНОЛАБ(2)
Теория (1 ч): Классификация роботов.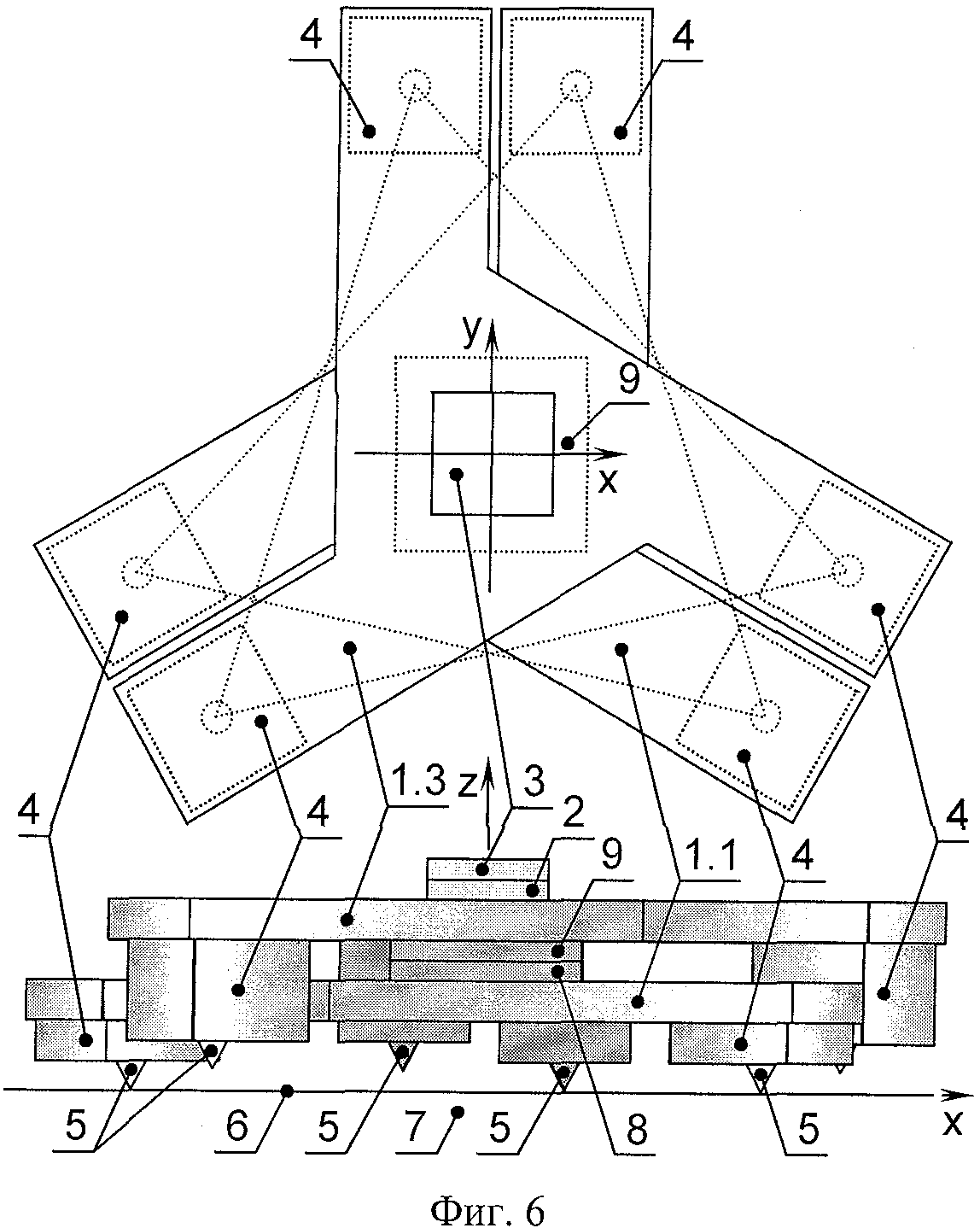 Повтор пройденного материала
Повтор пройденного материала
Практика (1 ч): Сборка модели шагающего робота
Раздел 6. Обзор набора Lego WeDo 2.0 (2 часа)
Теория(1 ч): Знакомство с компонентами конструктора Lego WeDo 2.0. Способы крепления деталей. Презентация «Техника безопасности при работе с Lego WeDo 2.0». Правила поведения на занятии.
Практика (1 ч): Конструирование по замыслу.
Раздел 7. Программное обеспечение Lego WeDo 2.0 (2 часа)
Теория (1 ч): Компьютер – инструмент для работы. Знакомство с программированием Lego WeDo 2.0. (блоки, палитра, пиктограммы, связь блоков программы с конструктором).
Практика (1 ч): Сборка конструкции «Палочка на двигателе»
Раздел 8. Работа над проектом «Механические конструкции» (11)
Теория (2 ч): Простые механизмы. Их роль в нашей жизни. Зубчатая передача Мотор и ось. Ременная передача. Реечный механизм.
Практика (9 ч): Сборка конструкций: «Конвеер», «Редуктор», «Вентилятор», «Радар», «Дрель», «Пилорама», «Мышеловка», «Болгарка», «Автоматические ворота»
Раздел 9. Работа над проектом «Роботы помощники» (10)
Работа над проектом «Роботы помощники» (10)
Теория(2 ч): Манипуляторы. Роботы в нашей жизни. Проектная работа «Автоматизация любого дела в бытовой сфере».
Практика(8 ч): Сборка конструкций «Рычаг», «Механизм захват», «Подъемный кран», «Миниробот», «Робот-наблюдатель», «Майло», «Майло датчик наклона», «Совместная работа»,
Раздел 10. Работа над проектом «Транспорт» (7)
Теория(1 ч): Датчик перемещения. Закрепление полученных знаний. Самый умный.
Практика(6): Сборка конструкций: «Тягач», «Автобот», «Гоночный автомобиль», «Грузовик», «Вертолет», «Движущийся спутник»
Конструирование модели. Соревнование команд. Создание моделей и написание новых программ для них.
Раздел 11. Итоговая работа по образовательному конструктору Lego WeDo 2.0 (1 часа)
Теория (0 ч):
Практика (1ч): Сборка конструкции «Робот-шагоход»
Гуманоидная робототехника
 youtube.com/embed/PehD12vMQJE”/>
youtube.com/embed/PehD12vMQJE”/>
Для учащихся в возрасте 14-17 лет, прошедших программы «Основы робототехники», знакомых с Arduino, а также имеющих опыт текстового программирования.
Актуальность
В настоящий момент во многих областях хозяйства требуются роботы, которые смогут заменить человека, работающего в тяжелых, вредных или опасных для жизни условиях, поэтому актуальной задачей становится разработка Гуманоидных роботов похожих на человека. Программа знакомит детей с Гуманоидными роботами и позволяет использовать в образовательном процессе последние технические достижения.
Цели
Создание автономного Гуманоидного Робота, использующего машинное зрение с базовыми программами движения.
Формирование навыков механической сборки, работы с микроэлектроникой, создания алгоритмов и программ управления роботом.
Задачи
Работа с роботами будет объединять в себе задачи по отверточной механической сборке робота, сборке и соединению кабелями электронных схем, применению датчиков контроля движения, созданию алгоритмов управления с целью изменения поведения робота в зависимости от динамически изменяющейся обстановки, изучению элементов машинного зрения и искусственного интеллекта.
Программа кружка строится на базе трех робототехнических конструкторов Гуманоидных роботов:
|
– двуногий робот Gekko «Ходок» |
|
|
– робот KONDO KHR-3HV |
|
|
– робот «Робокит» на базе KHR-3HV |
Во время занятий:
- Разберем что такое статическое и динамическое равновесие, поймем почему робот не падает, как работает сустав и движется конечность;
- Познакомимся (вспомним) с понятиями электрический ток и напряжение, что такое цифровая и аналоговая электроника, как работает электромотор и серво мотор;
- Узнаем, что такое микроконтроллер и среда разработки Arduino;
- Разберемся как из серво моторов и простых деталей собрать шлагбаум, манипулятор, шагающего робота «Ходок»;
- Запустим и научимся управлять роботом KONDO используя типовые движения. Затем мы научим его держать равновесие и перейдем к созданию своих движений для участия в спортивных соревнованиях, в конкурсах по танцам и многое другое;
- Поставим камеру на робота «Робокит» познакомимся с контроллером Open MV, запустим систему машинного зрения и сделаем робота автономным.
 Затем мы научим его держать равновесие и перейдем к созданию своих движений для участия в спортивных соревнованиях, в конкурсах по танцам и многое другое;
Затем мы научим его держать равновесие и перейдем к созданию своих движений для участия в спортивных соревнованиях, в конкурсах по танцам и многое другое;В основе содержания программы находится междисциплинарная область, состоящая из элементов физики, математики, биомеханики, робототехники и программирования. В программе будут встречаться элементы, выходящие за рамки школьной программы.
В результате учащиеся так же получат следующие навыки:
- Программирование простых статических движений робота;
- Понимание алгоритма действий для формирования динамических движений;
- Программирование на языке Питон стратегий поведения робота;
- Получение начальных навыков машинного зрения;
- Получение начальных навыков использования нейросетей;
- Управление группой роботов с распределением ролей;
- Синхронное поведение нескольких роботов.

Самые продвинутые будут учить роботов автономно играть в футбол, и смогут принять участие в Российских и мировых чемпионатах по дисциплинам:
- Гонки Гуманоидных роботов;
- Сумо Гуманоидных роботов;
- Танцы Гуманоидных роботов;
- Многоборье.
ДООП «Робототехника»
Первый год обучения – 72 часа.
Раздел1. Инструктаж по ТБ (1 час)
1. Инструктаж по ТБ. Техника безопасности в кабинете робототехники. Знакомство детей с техникой безопасности.
2. Раздел 2. Введение: информатика, кибернетика, робототехника (2 часа)
2-3. Знакомство детей с историей информатики, кибернетики, робототехники.
3. Раздел 3. Основы конструирования (6 часов)
4. Названия и принципы крепления деталей. Знакомство детей с названиями и принципами крепления деталей.
5-6. Виды механической передачи. Повышающая передача. Понижающая передача. Демонстрация детям полно приводной одномоторной тележки для повышения мощности, для повышения скорости.
7. Редуктор. Осевой редуктор с заданным передаточным отношением. Сборка механизма, используемого совместно с двигателями для преобразования и передачи крутящегося момента.
8-9. Стационарные моторные механизмы Конструирование стационарных моторных механизмов.
4. Раздел 4. Моторные механизмы (7 часов)
10-12. Одномоторный гонщик Сборка одномоторной гоночной машины на базе одномоторной тележки.
13-16. Преодоление горки. Шагающие роботы. Сборка по инструкции шагающего робота.
5. Раздел 5. Трехмерное моделирование (6 часов)
17-20. Сборка простейших моделей. Сборка моделей по инструкции.
21-22. Знакомство с контроллером. Показ детям контроллера. Главные функции.
6. Раздел 6. Введение в робототехнику (8 часов)
23 – 26. Одномоторная тележка Двухмоторная тележка Сборка и демонстрация одномоторной и двухмоторной тележек. Разница данных тележек.
27 – 30. Датчики Колесные, гусеничные и шагающие роботы Знание особенностей работы датчика. Сборка роботов по инструкции.
Сборка роботов по инструкции.
7. Раздел 7. Основы управления роботом (7 часов)
31 – 34. Пропорциональный регулятор Защита от «застреваний». Сборка механизма для защиты от «застреваний» робота во время прохождения испытанный.
35 – 37. Траектория с перекрестками. Пересеченная местность Обход лабиринта. Сборка робота по схеме для прохождения лабиринта на пересеченной местности.
8. Раздел 8. Удаленное управление (7 часов)
38 – 44. Управление моторами через bluetooth. Использование программ для управления моторами по средствам bluetooth.
9. Раздел 9. Игры роботов ( 8 часов)
45 – 48. Управляемый футбол роботов. Проведение состязания между различными группами детей по робофутболу.
49 −52. Футбол с инфракрасным мячом (основы).
10. Раздел 10. Состязания роботов. (9 часов)
53 – 55. Перетягивание каната. Проведение соревнований роботов в различных видах состязаний.
56 – 58. Следование по линии.
59 −61. Слалом.
11. Раздел 11. Творческие проекты ( 8 часов)
Раздел 11. Творческие проекты ( 8 часов)
62 – 64. Роботы – помощники человека. Выбор и написание проектов на выбранные заранее темы.
65 – 67. Роботы – артисты.
68 – 69. Свободные темы.
12. Раздел 12. Защита проектов. (3 часа)
70– 72. Защита проектов. Представление и защита проектов.
Как сделать шагающего робота
Привет, ребята! Надеюсь, вам уже понравился мой предыдущий учебник «Онлайн-метеостанция (NodeMCU)», и вы готовы к новому. После модели робота SMARS, которую мы собрали в прошлый раз, сегодняшний проект также посвящен обучению роботов, и мы будем использовать OTTO. Модель робота в этом видео, и это будет действительно потрясающий проект, этот проект может стать отличным началом в мире робототехники .
Во время создания этого проекта мы постарались сделать так, чтобы это руководство было для вас лучшим руководством, которое поможет вам, если вы хотите создать своего собственного робота, поэтому мы надеемся, что это руководство будет содержать необходимые документы.
Этот проект очень удобно сделать специально после того, как мы получили заказную печатную плату, которую мы заказали у JLCPCB, чтобы улучшить внешний вид нашего электронного устройства, а также в этом руководстве есть достаточно документов и кодов, которые помогут вам создать вашего красивого робота.
Мы сделали этот проект всего за 5 дней, всего за два дня, чтобы получить детали робота, напечатанные на 3D-принтере, все необходимые электронные компоненты, затем еще два дня, чтобы закончить изготовление оборудования и сборку, затем один день, чтобы подготовить код для подходит нашему проекту и мы приступили к тестированию и доработке.
Что вы узнаете из этого руководства:- Выбор компонентов в зависимости от их функций.
- Разберитесь в механизме роботов.
- Подготовьте принципиальную схему для подключения всех выбранных компонентов.
- Припаяйте электронные части к плате.
- Собрать все детали проекта (корпус робота).
- Запустите первый тест и подтвердите проект.

Начиная с описания проекта, как я уже сказал, мы воспроизведем модель робота OTTO, детали которой вы можете получить бесплатно от сообщества OTTO, но в наш проект мы добавим индивидуальный дизайн печатной платы для управления роботом. поэтому мы будем использовать микроконтроллер ATmega328 вместо использования всей платы Arduino Nano, как это делало сообщество для этого проекта.
Робот имеет множество функций, и вам понравятся его движения, выполняемые 4 сервомоторами , а его звуки воспроизводятся через активный зуммер , робот будет питаться от простой литиевой батареи 9V и управляется Bluetooth модуль через приложение для Android, которое вы можете бесплатно загрузить прямо из магазина воспроизведения или магазина приложений.
Движения робота выполняются 4 серводвигателями, поэтому у нас есть 2 сервопривода на каждой ноге, а также есть обновленная версия робота OTTO для управления движениями рук, но мы не будем делать этого в этом неустойчивом устройстве, и мы модернизируем панель управления для этой задачи в нашем следующем руководстве.
Чтобы собрать все электронные компоненты вместе, я решил создать свой собственный дизайн печатной платы для этого проекта и произвести его из JLCPCB, я перешел на платформу easyEDA, где я подготовил следующую принципиальную схему и, как вы можете видеть, все компоненты, которые нам нужны , затем я преобразовал схему в конструкцию печатной платы с необходимыми размерами, подходящими для шасси робота.
Шаг 3: Изготовление печатной платыПосле подготовки схемы я преобразовал ее в индивидуальный дизайн печатной платы с требуемыми размерами и формой, подходящими для нашего корпуса робота.Следующим шагом является создание файлов GERBER проекта печатной платы и загрузка их на страницу заказа JLCPCB для изготовления нашей печатной платы.
Четыре дня ждать печатных плат и вот мы здесь. Мы впервые пробуем желтый цвет для печатных плат, и он действительно выглядит так здорово.
Шаг 4. Детали корпуса робота, напечатанные на 3D-принтере Переходя к частям тела робота, как я уже упоминал в презентации, вы можете получить файлы STL этого робота с веб-сайта сообщества OTTO по этой ссылке, чтобы производить эти части на 3D-принтере.
Теперь у нас все готово, поэтому давайте рассмотрим список компонентов:
★ ☆ ★ Необходимые компоненты (ссылки на Amazon) ★ ☆ ★
Шаг 6: Программная частьТеперь нам нужно загрузить код робота в микроконтроллер, поэтому для этого нам понадобится плата Arduino Uno , о программном обеспечении робота вы можете использовать Arduino IDE для загрузки своего кода или вы можете просто загрузить блочную IDE OTTO, которая поможет вам с некоторыми примерами, чтобы начать создавать свою собственную программу для робота, в нашем случае мы загрузим этот код, предоставленный сообществом, этот код позволяет мне получить доступ ко всем функциям робота из приложения для Android.
Вы можете получить последнюю обновленную версию по этой ссылке, или вы можете просто загрузить прикрепленный ниже файл, связанный с версией кода 9, который мы использовали в нашем проекте.
Шаг 7: Сборка электроники Мы подготовили электронную часть, так что приступим к пайке наших электронных компонентов на печатную плату.
Как вы можете видеть на изображениях, использовать эту печатную плату очень легко благодаря ее очень высокому качеству , составляющему , и не забывая о этикетках, которые будут направлять вас, ребята, при пайке каждого компонента, потому что вы найдете на верхнем слое шелка этикетку каждого компонента с указанием его размещения на плате, и таким образом вы будете на 100% уверены, что не допустите ошибок при пайке.
Я припаял каждый компонент к его месту размещения, в отношении этой печатной платы это двухслойная печатная плата, это означает, что вы можете использовать обе ее стороны для пайки электронных компонентов.Шаг 8: Сборка и демонстрация корпуса робота
Перед началом сборки я советую вам откалибровать все серводвигатели под углом 90 ° , просто используйте для этого базовую демонстрацию сервоприводов Arduino.
Сборка очень проста:
- возьмите корпус робота и два серводвигателя и прикрутите их сверху.
- затем присоедините ноги к собранным сервоприводам для управления движениями ног.
- Следующий шаг – присоединить два других сервопривода к ногам и прикрепить части ступней к сервоприводам, и таким образом у вас будет по одному сервоприводу для каждой ноги и по одному сервоприводу для каждой ноги.
- Следующая деталь – ультразвуковой датчик, который мы надеваем на голову нашего робота.
- Последний шаг – это подключение ультразвукового датчика к его разъему и подключение сервоприводов к плате.
Вы можете обратиться к коду, где вы найдете соответствующий символ для каждого сервопривода, и вы найдете ту же этикетку на верхней стороне печатной платы, которую мы сделали.
После подключения аккумулятора мы прикрепляем голову к туловищу и можем начинать играть с нашим роботом.
Мне очень понравился этот проект, и я надеюсь увидеть, что вы, ребята, производите таких роботов, но все же некоторые другие улучшения, которые нужно выполнить в нашем проекте, чтобы сделать его намного более жирным, поэтому я буду ждать ваших комментариев, чтобы улучшить Это.
И последнее, убедитесь, что вы занимаетесь электроникой каждый день.
Это был BEE MB от MEGA DAS, увидимся в следующий раз.
Как сделать шагающего робота
Привет, ребята! Надеюсь, вам уже понравился мой предыдущий учебник «Онлайн-метеостанция (NodeMCU)», и вы готовы к новому. После модели робота SMARS, которую мы собрали в прошлый раз, сегодняшний проект также посвящен обучению роботов, и мы будем использовать OTTO. Модель робота в этом видео, и это будет действительно потрясающий проект, этот проект может стать отличным началом в мире робототехники .
Во время создания этого проекта мы постарались сделать так, чтобы это руководство было для вас лучшим руководством, которое поможет вам, если вы хотите создать своего собственного робота, поэтому мы надеемся, что это руководство будет содержать необходимые документы.
Этот проект очень удобно сделать специально после того, как мы получили заказную печатную плату, которую мы заказали у JLCPCB, чтобы улучшить внешний вид нашего электронного устройства, а также в этом руководстве есть достаточно документов и кодов, которые помогут вам создать вашего красивого робота.
Мы сделали этот проект всего за 5 дней, всего за два дня, чтобы получить детали робота, напечатанные на 3D-принтере, все необходимые электронные компоненты, затем еще два дня, чтобы закончить изготовление оборудования и сборку, затем один день, чтобы подготовить код для подходит нашему проекту и мы приступили к тестированию и доработке.
Что вы узнаете из этого руководства:- Выбор компонентов в зависимости от их функций.
- Разберитесь в механизме роботов.
- Подготовьте принципиальную схему для подключения всех выбранных компонентов.
- Припаяйте электронные части к плате.
- Собрать все детали проекта (корпус робота).
- Запустите первый тест и подтвердите проект.

Начиная с описания проекта, как я уже сказал, мы воспроизведем модель робота OTTO, детали которой вы можете получить бесплатно от сообщества OTTO, но в наш проект мы добавим индивидуальный дизайн печатной платы для управления роботом. поэтому мы будем использовать микроконтроллер ATmega328 вместо использования всей платы Arduino Nano, как это делало сообщество для этого проекта.
Робот имеет множество функций, и вам понравятся его движения, выполняемые 4 сервомоторами , а его звуки воспроизводятся через активный зуммер , робот будет питаться от простой литиевой батареи 9V и управляется Bluetooth модуль через приложение для Android, которое вы можете бесплатно загрузить прямо из магазина воспроизведения или магазина приложений.
Движения робота выполняются 4 серводвигателями, поэтому у нас есть 2 сервопривода на каждой ноге, а также есть обновленная версия робота OTTO для управления движениями рук, но мы не будем делать этого в этом неустойчивом устройстве, и мы модернизируем панель управления для этой задачи в нашем следующем руководстве.
Чтобы собрать все электронные компоненты вместе, я решил создать свой собственный дизайн печатной платы для этого проекта и произвести его из JLCPCB, я перешел на платформу easyEDA, где я подготовил следующую принципиальную схему и, как вы можете увидев все необходимые нам компоненты, я преобразовал схему в конструкцию печатной платы с требуемыми размерами, подходящими для шасси робота.
Шаг 3: Изготовление печатной платыПосле подготовки схемы я преобразовал ее в индивидуальный дизайн печатной платы с требуемыми размерами и формой, подходящими для нашего корпуса робота.Следующим шагом является создание файлов GERBER проекта печатной платы и загрузка их на страницу заказа JLCPCB для изготовления нашей печатной платы.
Четыре дня ждать печатных плат и вот мы здесь. Мы впервые пробуем желтый цвет для печатных плат, и он действительно выглядит так здорово.
Шаг 4: Детали тела робота, напечатанные на 3D-принтере Переходя к деталям тела робота, как я уже упоминал в презентации, вы можете получить файлы STL этого робота с веб-сайта сообщества OTTO по этой ссылке, чтобы производить эти детали через 3д принтер.
Теперь у нас все готово, поэтому давайте рассмотрим список компонентов:
★ ☆ ★ Необходимые компоненты (ссылки Amazon) ★ ☆ ★
Шаг 6: Программная частьТеперь нам нужно загрузить код робота для микроконтроллера, поэтому для этого нам понадобится плата Arduino Uno , о программном обеспечении робота вы можете использовать Arduino IDE для загрузки своего кода или вы можете просто загрузить блочную IDE OTTO, которая поможет вам с некоторыми примерами чтобы начать создавать свою собственную программу для робота, в нашем случае мы загрузим этот код, предоставленный сообществом, этот код позволяет мне получить доступ ко всем функциям робота из приложения для Android.
Вы можете получить последнюю обновленную версию по этой ссылке, или вы можете просто загрузить прикрепленный ниже файл, связанный с версией кода 9, который мы использовали в нашем проекте.
Шаг 7: Сборка электроники Мы подготовили электронную часть, так что приступим к пайке наших электронных компонентов на печатной плате.
Как вы можете видеть на изображениях, использовать эту печатную плату очень легко благодаря ее очень высокому качеству , составляющему , и не забывая о этикетках, которые будут направлять вас, ребята, при пайке каждого компонента, потому что вы найдете на верхнем слое шелка этикетку каждого компонента с указанием его размещения на плате, и таким образом вы будете на 100% уверены, что не допустите ошибок при пайке.
Я припаял каждый компонент к его месту размещения, в отношении этой печатной платы это двухслойная печатная плата, это означает, что вы можете использовать обе ее стороны для пайки электронных компонентов.Шаг 8: Сборка и демонстрация корпуса робота
Перед началом сборки я советую вам откалибровать все серводвигатели на угол 90 ° , просто используйте для этого базовую демонстрацию сервоприводов Arduino.
Сборка очень проста:
- возьмите корпус робота и два серводвигателя и прикрутите их сверху.
- затем присоедините ноги к собранным сервоприводам для управления движениями ног.
- Следующий шаг – присоединить два других сервопривода к ногам и прикрепить части ступней к сервоприводам, и таким образом у вас будет по одному сервоприводу для каждой ноги и по одному сервоприводу для каждой ноги.
- Следующая деталь – ультразвуковой датчик, который мы надеваем на голову нашего робота.
- Последний шаг – это подключение ультразвукового датчика к его разъему и подключение сервоприводов к плате.

Вы можете обратиться к коду, где вы найдете соответствующий символ для каждого сервопривода, и вы найдете ту же этикетку на верхней стороне печатной платы, которую мы сделали.
После подключения аккумулятора мы прикрепляем голову к туловищу и можем начинать играть с нашим роботом.
Мне очень понравился этот проект, и я надеюсь увидеть, что вы, ребята, производите таких роботов, но все же некоторые другие улучшения, которые нужно выполнить в нашем проекте, чтобы сделать его намного более жирным, поэтому я буду ждать ваших комментариев, чтобы улучшить Это.
И последнее, убедитесь, что вы занимаетесь электроникой каждый день.
Это был BEE MB от MEGA DAS, увидимся в следующий раз.
Страница не найдена | IHMC
Международный лидер в области человеческой деятельности принимает руководящую роль в IHMC
Директор и главный исполнительный директор IHMC д-р Кен Форд объявил, что д-р Морли О. Стоун, бывший старший вице-президент по исследованиям в Университете штата Огайо, присоединится к институту в качестве главного директора по стратегическому партнерству.
Доктор Стоун признан международным лидером в области исследований и биомиметики человека с почти 30-летним опытом исследований и разработок.В IHMC он возьмет на себя руководящую роль в развитии внешних стратегических отношений с федеральными агентствами, исследовательскими университетами и частным сектором, а также в реализации, координации и инициировании научных проектов, а также в оказании помощи и наставничества ученым и исследовательскому персоналу IHMC.
В качестве старшего вице-президента по исследованиям доктор Стоун курировал годовой бюджет более 1 миллиарда долларов на фундаментальные и прикладные исследования в штате Огайо. До OSU Морли занимал должность директора по технологиям в исследовательской лаборатории ВВС, где он отвечал за помощь в планировании и исполнении ежегодных 2 долларов.1 миллиард долларов на научно-техническую программу ВВС и еще 2,3 миллиарда долларов на исследования и разработки, финансируемые из внешних источников. С 2003 по 2006 год д-р Стоун принял назначение в качестве менеджера программ в Управлении оборонных наук Агентства перспективных оборонных исследовательских проектов (DARPA).
Доктор Стоун получил докторскую степень в области биохимии в Университете Карнеги-Меллона. Его исследовательские интересы охватывают широкий спектр областей, таких как взаимодействие материаловедения, биотехнологии, возможностей человека и автономных систем.Помимо руководства исследованиями, д-р Стоун является признанным лидером в правительстве и высшем образовании в области предотвращения и предотвращения иностранного влияния в исследованиях и разработках.
IHMC – это некоммерческий исследовательский институт Университетской системы Флориды, в котором исследователи являются первопроходцами в области науки и технологий, направленных на использование и расширение человеческих возможностей.
Бонни Дорр из IHMC получила признание за выдающуюся карьеру
Доктор Бонни Дорр из Флоридского института познания человека и машины была назначена членом Ассоциации вычислительной техники.Она – одна из 95 стипендиатов, которых ACM отмечает в этом году за их вклад в компьютерные и информационные технологии.
Дорр – заместитель директора отделения IHMC в Окале и один из старших исследователей института. Она признана одним из лидеров страны в области обработки естественного языка.
«Это большая честь для Бонни, – сказал генеральный директор IHMC Кен Форд. «У нее такая выдающаяся карьера. Ее опыт простирается от кибербезопасности до социальных вычислений и искусственного интеллекта.Приятно видеть, что ее признают за ту важную работу, которую она выполняет ».
ACM входят члены со всего мира, которые работают в области искусственного интеллекта, облачных вычислений, вычислительной биологии, науки о данных, разработки программного обеспечения, взаимодействия человека с компьютером, виртуальной реальности и других областях. Программа стипендиатов ACM признает один процент лучших членов ассоциации во всем мире.
«Эти мужчины и женщины внесли решающий вклад в технологии, которые преобразуют целые отрасли, а также нашу личную жизнь», – сказал президент ACM Габриэле Коцис.«Мы полностью ожидаем, что эти новые стипендиаты ACM продолжат идти в авангарде своих соответствующих областей».
Вместе со своими коллегами из IHMC Дорр основала новую область обработки кибер-естественного языка, которая объединяет опыт
пересечение кибербезопасности, социальных вычислений, искусственного интеллекта и обработки естественного языка. Ее интересы сосредоточены на извлечении кибер-событий и понимании естественного языка для обнаружения атак, распознавания намерений злоумышленников и предотвращения атак социальной инженерии.
В прошлом году Агентство перспективных оборонных исследовательских проектов (DARPA) пригласило Дорра и несколько других ученых и инженеров со всей страны стать частью группы, которая предоставляет независимые оценки передовых информационных наук и технологий, связанных с Министерством США. обороны.
С момента присоединения к IHMC в 2014 году Дорр руководила несколькими проектами DARPA, включая разработку системы для обнаружения и предотвращения атак социальной инженерии в США. Она также работает над проектом IARPA по извлечению с помощью ИИ различных точек зрения из языковых вводимых данных.
Джеймс Аллен из IHMC признан одним из ведущих ученых страны
Заместитель директора и старший научный сотрудник IHMC Джеймс Аллен был избран Американской ассоциацией содействия развитию науки в ранг научного сотрудника AAAS.
Каждый год ассоциация выбирает членов, чьи усилия по развитию науки и ее приложений считаются выдающимися и научно обоснованными. AAAS особо цитирует Аллена за его «широкий вклад в искусственный интеллект и понимание естественного языка, включая основополагающий вклад в темпоральную логику.”
AAAS особо цитирует Аллена за его «широкий вклад в искусственный интеллект и понимание естественного языка, включая основополагающий вклад в темпоральную логику.”
Помимо работы в IHMC, к которому он присоединился в 2006 году, Аллен также назначен профессором компьютерных наук им. Джона Х. Дессауэра в Университете Рочестера в Рочестере, штат Нью-Йорк.
После получения докторской степени. Получив в 1979 году диплом в области информатики из Университета Торонто и получив в 1984 году президентскую премию Национального научного фонда, Аллен заработал международную репутацию лидера в области искусственного интеллекта и совместного взаимодействия человека с машиной.
«Это заслуженная честь для Джеймса», – сказал генеральный директор IHMC Кен Форд. «На протяжении всей своей карьеры Джеймс был идейным лидером в области ИИ. Я, как и остальные коллеги Джеймса здесь, в IHMC, очень за него счастлив ».
Назначение стипендиатов AAAS началось в 1874 году. Официальное избрание Джеймса стипендиатом будет отмечено на ежегодном собрании ассоциации, которое в этом году из-за COVID-19 состоится практически в феврале.
IHMC – это некоммерческий исследовательский институт Университетской системы Флориды, где исследователи разрабатывают новаторские технологии, направленные на использование и расширение человеческих возможностей.Для получения дополнительной информации посетите ihmc.us.
Выдающийся ученый в области физических упражнений присоединяется к IHMC
Доктор Маркас Бамман – всемирно признанный исследователь, известный своим научным вкладом в биологию скелетных мышц человека и медицинскую реабилитацию. Он является основателем и бывшим директором Университета Алабамы в Бирмингемском центре лечебной физкультуры.
Бамман и центр UAB признаны мировыми лидерами в области биологических механизмов, лежащих в основе адаптации, вызванной физическими упражнениями, и их клинического применения в профилактике, лечении и реабилитации заболеваний.Он присоединяется к IHMC в качестве старшего научного сотрудника и станет частью биологически мотивированной команды, которую основатель и генеральный директор IHMC Кен Форд формировал в течение последних нескольких лет.
С момента своего основания в 1990 году IHMC в основном проводил передовые исследования в области искусственного интеллекта и робототехники. Однако последние несколько лет Ford создал исследовательскую группу, сосредоточенную на продолжительности жизни, устойчивости и производительности. IHMC уделяет особое внимание инновационным способам расширения возможностей и устойчивости высокопроизводительных людей, таких как космонавты, летчики-истребители и элитные специальные операторы.
«Маркас стал известен во всем мире благодаря своей работе по пониманию молекулярных реакций на упражнения и их отношения к здоровью и работоспособности», – сказал Форд. «Его исследования высоко ценятся такими организациями, как Национальные институты здравоохранения, Министерство обороны, НАСА и другими агентствами по всей стране. Он будет прекрасным коллегой ».
Бамман часто упоминается в национальных СМИ о том, как польза для здоровья, вызванная физическими упражнениями, может повлиять на профилактику, лечение и реабилитацию заболеваний. Его клиническое испытание в 2011 году привлекло значительное внимание страны, поскольку показало, как мужчины и женщины в возрасте от 60 до 70 лет, начавшие тренировку с отягощениями под наблюдением, могут развивать мышцы, которые были такими же большими и сильными, как у среднего человека 35-40 лет.
Его клиническое испытание в 2011 году привлекло значительное внимание страны, поскольку показало, как мужчины и женщины в возрасте от 60 до 70 лет, начавшие тренировку с отягощениями под наблюдением, могут развивать мышцы, которые были такими же большими и сильными, как у среднего человека 35-40 лет.
«На более поздних этапах моей академической карьеры я все больше и больше интересовался исследованиями, связанными с обороной, и способами повышения эффективности и устойчивости боевиков и спецназа», – сказал Бамман. «IHMC, безусловно, является одним из ведущих научно-исследовательских институтов страны, с которым я довольно хорошо познакомился после выступления там.”
Этот разговор привел к нескольким совместным работам с институтом и главным научным сотрудником IHMC Тимом Бродериком.
«Я очень ценю лидерство, видение и стиль работы в IHMC, все из которых сосредоточены на результатах исследований», – сказал Бамман. «Исследования, проводимые в институте, носят инновационный характер и приведут к важным результатам и научным достижениям. Текущие исследования человеческого потенциала и устойчивости к внешним воздействиям, проводимые IHMC, безусловно, сильны, но представляют собой лишь верхушку айсберга с захватывающим будущим.”
Текущие исследования человеческого потенциала и устойчивости к внешним воздействиям, проводимые IHMC, безусловно, сильны, но представляют собой лишь верхушку айсберга с захватывающим будущим.”
Один из первых проектов, над которым Бамман будет работать в IHMC, – это спонсируемая DARPA программа, направленная на разработку революционной платформы для повышения уровня подготовки и повышения устойчивости элитных военнослужащих. Проект под названием Peerless Operator Biologic Aptitude разрабатывается для повышения биологической способности воинов с целью повышения их адаптивности и устойчивости.
IHMC – это некоммерческий исследовательский институт Университетской системы Флориды, где исследователи разрабатывают новаторские технологии, направленные на использование и расширение человеческих возможностей.Для получения дополнительной информации посетите ihmc.us.
DARPA приглашает Бонни Дорр из IHMC в группу для оценки исследования агентства
Агентство перспективных оборонных исследовательских проектов (DARPA) назначило доктора Бонни Дорр из IHMC в свою исследовательскую группу по информационным наукам и технологиям (ISAT) на трехлетний срок.
Дорр – ведущий исследователь в области обработки естественного языка. Она работает заместителем директора и старшим научным сотрудником в филиале IHMC в Окале.Исследовательская группа ISAT объединяет 30 ученых и инженеров со всей страны, которые постоянно проводят независимые оценки передовых информационных наук и технологий, связанных с Министерством обороны США.
DARPA – агентство Министерства обороны США, ответственное за разработку новых технологий для использования в вооруженных силах. Президент Дуайт Эйзенхауэр создал агентство в 1958 году в ответ на запуск советского спутника в 1957 году.Агентство создало ISAT Study Group в 1987 году для поддержки своих технологических отделов и определения будущих направлений исследований.
«Для меня большая честь быть частью такой яркой и талантливой группы», – сказал Дорр. «Возможность участвовать в разработке будущих исследований для такого агентства, как DARPA, – уникальная возможность. Я очень этого жду ».
Дорр работала с DARPA над рядом проектов с момента присоединения к IHMC в 2014 году. Она руководила разработкой системы для обнаружения и предотвращения атак социальной инженерии на США.С., а также работает с группой по развитию коммуникации на основе ИИ.
Она руководила разработкой системы для обнаружения и предотвращения атак социальной инженерии на США.С., а также работает с группой по развитию коммуникации на основе ИИ.
«Бонни – одна из ведущих исследователей в своей области и отличный выбор для работы в исследовательской группе ISAT», – сказал генеральный директор IHMC Кен Форд. «Я думаю, что для Бонни это реальное свидетельство того, что она одна из немногих женщин, которые были включены в исследовательскую группу ISAT. Я надеюсь, что ее лидерство и успех как ученого побуждают других женщин рассматривать информатику и обработку естественного языка как свою карьеру ».
Вместе с коллегами из IHMC Дорр основал новую область обработки кибер-естественного языка, объединив опыт на стыке кибернетики, социальных вычислений, ИИ и обработки естественного языка.Ее интересы сосредоточены на извлечении кибер-событий и понимании естественного языка для обнаружения атак, распознавания намерений злоумышленников и предотвращения атак социальной инженерии.
Подкаст IHMC в борьбе за международную награду
Международная академия цифровых искусств и наук объявила на этой неделе, что STEM-Talk был номинирован на Webby Awards, международный конкурс, признающий превосходство в Интернете.
STEM-Talk, образовательная служба Флоридского института познания человека и машин (IHMC), была номинирована на премию Webby Awards в категориях научных и образовательных подкастов, а также на премию Webby People’s Voice Awards.Члены Академии выбирают победителей Премии Вебби, а Премию «Голос народа» голосует общественность.
Люди должны до 7 мая посетить сайт vote.webbyawards.com, чтобы проголосовать.
Как номинант Webby, STEM-Talk был назван одним из пяти лучших подкастов в мире в категории “наука и образование”. В прошлом году более трех миллионов человек из 230 стран проголосовали за премию «Голос народа».
STEM-Talk занимал первое место за последние два года из трех в категории науки и медицины на ежегодной премии People’s Choice Podcast Awards.
Кен Форд, соучредитель и генеральный директор IHMC, совместно с научным сотрудником IHMC Дон Кернагис ведет подкаст. STEM-Talk, состоящий из более чем 100 эпизодов, включает беседы с некоторыми из самых интересных людей в мире науки и был загружен более чем двумя миллионами человек с момента его запуска в 2016 году. Для получения дополнительной информации о IHMC посетите www.ihmc .нас.
STEM-Talk второй раз за три года получает награду “Выбор народа”
Второй раз за три года своего существования подкаст STEM-Talk IHMC занял первое место в категории «наука и медицина» на 14-й ежегодной премии People’s Choice Podcast Awards.
В международном конкурсе участвуют тысячи номинантов более чем в 20 номинациях. По словам Тодда Кокрейна, основавшего конкурс в 2005 году, People’s Choice признает лучшие подкасты в мире, номинированные слушателями.
«Награды действительно независимы, а номинированные и выигравшие шоу имеют значительные права хвастаться любимыми слушателями», – сказал Кокрейн.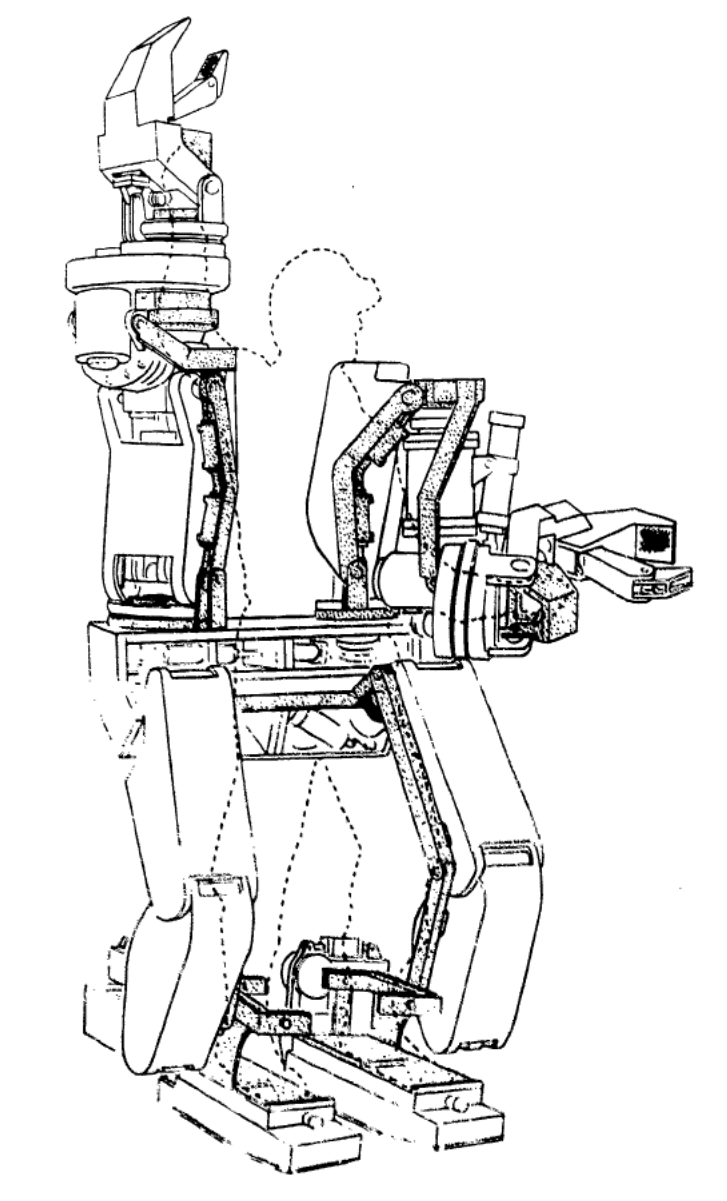
STEM-Talk приближается к своему сотому выпуску и также приближается к 2 миллионам загрузок.В 2017 году STEM-Talk не только занял первое место в категории «наука и медицина», но и занял второе место в конкурсе.
STEM-Talk позиционирует себя как «беседы с некоторыми из самых интересных людей в мире науки и технологий». Среди гостей были как лауреаты Нобелевской премии по физике, так и астронавты НАСА, а также многочисленные лидеры в области медицины.
Подкаст загружается в iTunes, Stitcher, Google, Overcast и другие приложения для подкастов два раза в месяц.
Генеральный директор IHMC доктор Кен Форд совместно с научным сотрудником IHMC доктором Дон Кернагис ведет подкаст. Старший специалист по творчеству и мультимедиа Уильям Хауэлл редактирует подкаст вместе с сотрудником Джорданом Аккардо. Директор по коммуникациям Рэнди Хаммер – продюсер шоу.
Некоторые из наиболее популярных серий STEM-Talk включают:
- Доктор Стюарт Филлипс, профессор кинезиологии в Университете Макмастера, который в 82 серии рассказал о своих исследованиях здоровья мышц и диетического белка.
- Доктор Роберт Эпштейн, психолог, журналист и бывший редактор Psychology Today, который рассказал о своей академической карьере в области поведенческих наук в 89 серии, а также о своем последнем исследовании невидимого влияния технологических компаний, особенно Google, на потребителей и потребителей. политическое поведение.
- Меган Робертс, научный руководитель Nourish Balance Thrive, которая была показана в серии 92 и наиболее известна своей статьей 2017 года в Cell Metabolism, в которой показано, что кетогенная диета увеличивает продолжительность жизни и здоровье взрослых мышей.
Чтобы найти этот и другие выпуски, посетите ihmc.us/stemtalk.
UWF и IHMC объявляют об открытии первой группы докторов наук штата. в интеллектуальных системах и робототехнике
Пресс-релиз UWF-IHMC 201
Директор докторской программы Брент Венейбл (в центре) с Жаком Перри (слева) и Дунканом Калвертом (справа)
Этой осенью Университет Западной Флориды и Институт когнитивных исследований человека и машин приветствовали первую группу из пяти студентов на недавно учрежденной докторской программе по интеллектуальным системам и робототехнике.
Программа направлена на разработку передовых программных и аппаратных технологий, которые объединяют человеческие и машинные элементы для использования их сильных сторон и смягчения их соответствующих слабостей. Он согласуется со стратегическим видением Университета в отношении исследований, которые влияют на экономическое развитие Северо-Западной Флориды и технологические предприятия. Первая в своем роде во Флориде и одна из немногих в стране, программа будет обслуживать производство, здравоохранение, оборону и другие высокотехнологичные отрасли, обеспечивая критически важную поддержку в сферах карьерного роста, пользующихся высоким спросом.
«UWF приветствует уважаемую группу нетерпеливых докторантов, каждый из которых обладает уникальным опытом», – сказала президент UWF Марта Д. Сондерс. «Они готовы, и мы уверены, что UWF и IHMC приведут их к личному успеху».
Докторантура в области интеллектуальных систем и робототехники предложит студентам индивидуальные пути, соответствующие их интересам. Программа состоит из базовых курсов по робототехнике и искусственному интеллекту, или ИИ, которые затрагивают такие темы, как представление и рассуждение знаний, машинное обучение, вычислительные методы в ИИ, базовое взаимодействие аппаратного и программного обеспечения и методы исследования.
Программа состоит из базовых курсов по робототехнике и искусственному интеллекту, или ИИ, которые затрагивают такие темы, как представление и рассуждение знаний, машинное обучение, вычислительные методы в ИИ, базовое взаимодействие аппаратного и программного обеспечения и методы исследования.
«Наша миссия по этой программе – превратить студентов в выпускников, которые смогут сразу воспользоваться возможностями рабочей силы, которые будут готовы и ждут их, для дальнейшего развития области и инновационных исследований», – сказал д-р Кен Форд, генеральный директор IHMC.
Двое студентов, Тахер Раггуй и Андреа Мартин, перешли в UWF из Университета Тулейна, чтобы стать частью первой когорты, последовавшей за доктором Брентом Венейблом, назначенным директором докторской программы по интеллектуальным системам и робототехнике.Венейбл ранее занимал совместную должность профессора информатики в Тулейне и научного сотрудника IHMC. Она сказала, что ее главный приоритет в программе – подготовить студентов к успеху в исследованиях, которые их интересуют.
«Как я вижу, моя задача – сделать это оптимальной средой и возможностью для всех участников; участвующие студенты, преподаватели, исследователи », – сказал Венейбл. «Эти студенты будут работать в лабораториях с исследователями более четырех лет, и у них будет шанс что-то изменить.С точки зрения наставника, это «академическое воспитание», и моя работа – обеспечить его успех ».
Жак Перри, выпускник UWF и ветеран армии, – еще один кандидат, который был принят в программу. Перри имеет 10-летний опыт работы в сфере кибербезопасности и в настоящее время является ведущим инженером по кибербезопасности и менеджером по безопасности информационных систем в 782-й испытательной эскадрилье на базе ВВС Эглин.
Перри прошел стажировку в IHMC в аспирантуре, что, по его словам, впервые пробудило его интерес к искусственному интеллекту.Когда появилась возможность провести исследование ИИ, которое могло бы улучшить усилия по кибербезопасности, наряду с доступом к ресурсам IHMC, он, не колеблясь, подал заявку на докторскую программу.
«Моя докторская работа будет иметь прямое отношение к кибербезопасности миссий ВВС», – сказал Перри. «Эта программа также позволит мне занять лидирующую позицию в киберсообществе ВВС, где я смогу больше сосредоточиться на возможностях ИИ в киберзащите и нападении. В конечном итоге я ожидаю, что ИИ будет играть сильную оборонительную и наступательную роль в кибервойне, что по своей сути потребует от следующего поколения специалистов по кибербезопасности досконального понимания возможностей и ограничений ИИ и того, как он будет формировать поле кибербезопасности.”
Среди других студентов, включенных в осенний курс 2019 года, – выпускник UWF Дункан Калверт, который в настоящее время работает в лаборатории робототехники в IHMC, и Бхавянш Мишра, недавний выпускник UWF, прошедший стажировку в IHMC летом 2018 года.
Некоммерческий исследовательский институт государственной университетской системы, IHMC является пионером технологий, направленных на расширение возможностей человека с помощью уникального подхода, сочетающего информатику, когнитивную психологию, нейробиологию, инженерию, медицинские науки и смежные дисциплины.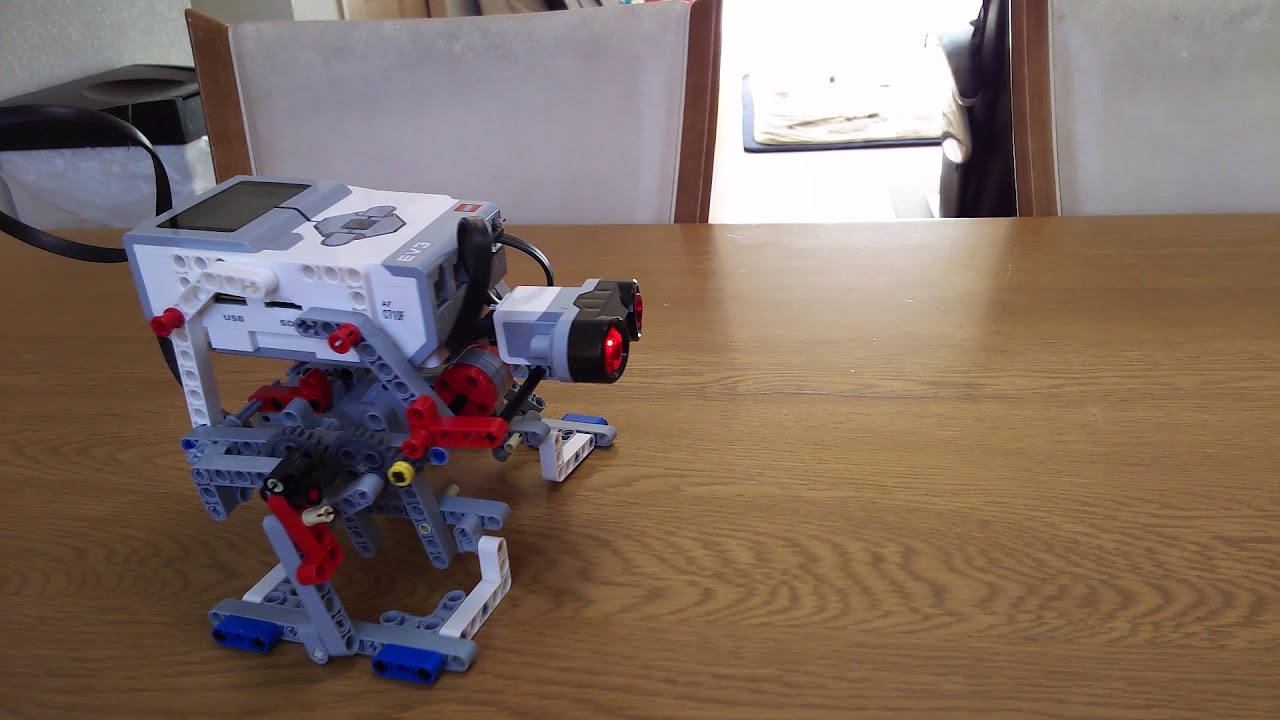
Для получения дополнительной информации о Ph.D. по интеллектуальным системам и робототехнике посетите uwf.edu/isr.
UWF и IHMC объявляют инаугуратора докторской программы по интеллектуальным системам и робототехнике
Университет Западной Флориды и Флоридский институт познания человека и машин объявляют д-ра Кристен «Брент» Венейбл первым директором Ph.D. в программе «Интеллектуальные системы и робототехника».
UWF сотрудничает с IHMC в рамках программы, которая начинается осенью 2019 года.Venable будет формировать и направлять новую программу, нанимать преподавателей и докторантов.
«Долгожданная докторская программа нашла подходящего лидера в лице доктора Венейбла», – сказала президент UWF Марта Д. Сондерс. «Ее опыт в области искусственного интеллекта хорошо сочетается с видением программы по развитию идейных лидеров в этих захватывающих областях».
Венейбл поступает в UWF из Университета Тулейна, где она занимала совместную должность профессора информатики и ученого-исследователя в IHMC.
«Я знаю Брент долгое время, и она – идеальный выбор, чтобы возглавить новую программу», – сказал д-р Кен Форд, генеральный директор и директор IHMC. «Брент обладает обширным опытом в области искусственного интеллекта и смежных темах, и нам повезло, что она согласилась занять эту позицию».
Основные исследовательские интересыVenable связаны с искусственным интеллектом, включая рассуждение на основе ограничений, предпочтения, временные рассуждения и вычислительный социальный выбор. Ее исследования направлены на обеспечение прочной основы для разработки и развертывания интеллектуальных систем, способных определять предпочтения.
«Это прекрасная возможность для меня», – сказал Венейбл. «Я люблю исследования и люблю работать со студентами, поэтому эта должность дает мне лучшее из обоих миров. Я особенно взволнован тем, что у нас есть потенциал для разработки уникальной программы в Соединенных Штатах, по которой студенты будут работать над исследовательскими проектами, как только они ступят на территорию кампуса ».
Венейбл начала свою карьеру в сфере высшего образования в качестве преподавателя кафедры чистой и прикладной математики в Университете Падуи в Италии, где она также получила докторскую степень в области компьютерных наук и степень лауреата с отличием по математике.
Новая программа является первой в своем роде во Флориде и одной из немногих в стране. Он согласуется со стратегическим видением Университета в отношении исследований, которые влияют на экономическое развитие Северо-Западной Флориды и технологические предприятия. Программа будет обслуживать обрабатывающую промышленность, здравоохранение, оборону и другие высокотехнологичные отрасли, обеспечивая критически важную поддержку в сферах карьерного роста, пользующихся высоким спросом.
Программа будет сосредоточена на предоставлении студентам практического опыта исследования с самого начала.
«Волнение вокруг новой программы было ощутимым, и с объявлением о руководстве доктора Венейбла волнение растет, – сказал д-р Яроми Кул, исполняющий обязанности декана Колледжа науки и инженерии Хэла Маркуса. «Ее интересы и опыт будут способствовать запуску и созданию конкурентоспособной программы, которая готовит поколения студентов к успеху на протяжении всей жизни».
«Ее интересы и опыт будут способствовать запуску и созданию конкурентоспособной программы, которая готовит поколения студентов к успеху на протяжении всей жизни».
Для получения дополнительной информации о программе «Докторантура в области интеллектуальных систем и робототехники» посетите веб-сайт uwf.edu / isr
IHMC и Andrews Research and Education Foundation объявляют о партнерстве для проведения исследовательских проектов
Передовой исследовательский центр Пенсаколы Флоридский институт познания человека и машин (IHMC) и Фонд исследований и образования Эндрюса (AREF), исследовательское подразделение Института Эндрюса в Галф Бриз, подписали соглашение о сотрудничестве в области деятельности человека. исследовать.
«Нам действительно повезло, что здесь, в нашем сообществе, есть два мировых лидера в области человеческой деятельности», – сказал Кен Форд, соучредитель и генеральный директор IHMC.«Это партнерство будет использовать работу обеих организаций на благо спортивной медицины, а также программы, направленные на улучшение способностей и устойчивости космонавтов, летчиков-истребителей, водолазов и других элитных членов наших вооруженных сил».
IHMC и AREF будут делить офисные и лабораторные помещения на своих предприятиях в Пенсаколе и Gulf Breeze. Ученые и врачи будут сотрудничать в исследованиях в различных областях, от оптимизации физических и когнитивных способностей до разработки технологий, направленных на помощь высокопроизводительным людям, таким как профессиональные спортсмены, космонавты и летчики-истребители.
«Сотрудники AREF очень рады, что они смогут работать с IHMC в областях, которые помогут нам в нейрохирургии, нейробиологии, офтальмологии и, конечно же, в спортивной медицине», – сказал Эштон Хейворд, президент Фонда исследований и образования Эндрюса.
IHMC – это некоммерческий исследовательский институт, который превратился в одну из ведущих исследовательских организаций мира. Его ученые и инженеры исследуют широкий спектр научных и технологических тем с целью усиления и расширения человеческого познания, восприятия, передвижения и устойчивости.В частности, IHMC является лидером в области искусственного интеллекта, робототехники и работы человека в экстремальных условиях.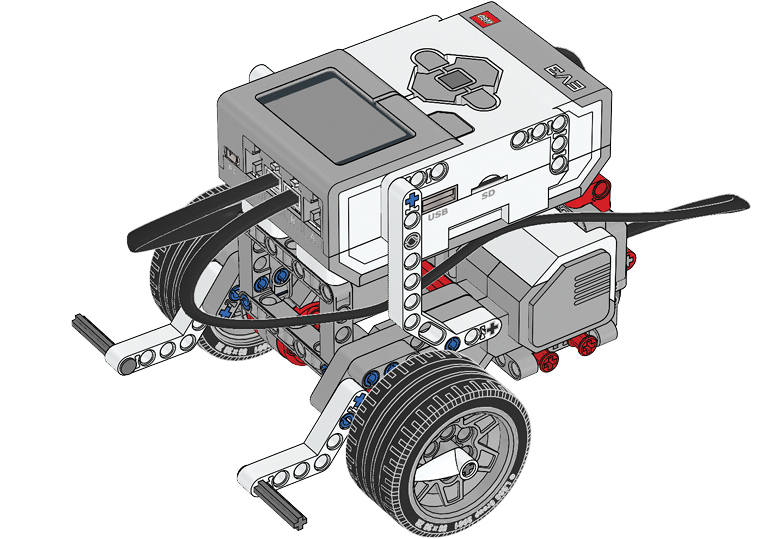 Исследовательский институт со штаб-квартирой в Пенсаколе является частью Университетской системы Флориды с филиалом в Окале.
Исследовательский институт со штаб-квартирой в Пенсаколе является частью Университетской системы Флориды с филиалом в Окале.
AREF – это исследовательское подразделение Института Эндрюса, ведущего национального центра ортопедии и спортивной медицины. Институт Эндрюса является частью Baptist Health Care и был основан доктором Джеймсом Эндрюсом, хирургом-ортопедом, известным своим лечением травм коленей, локтей и плеч, а также восстановлением поврежденных связок.Он помог лечить травмы и возродить карьеры многих известных спортсменов, таких как Дрю Брис, Бо Джексон, Роджер Клеменс, Джерри Пейт, Джек Никлаус, Чарльз Баркли и Майкл Джордан.
Хейворд, который восемь лет проработал мэром Пенсаколы, прежде чем присоединиться к AREF в январе, сказал, что миссия состоит в том, чтобы помочь просвещать общественность и проводить дальнейшие исследования в области ортопедии, деятельности человека, профилактики травм, технологий, а также хирургических и биомедицинских улучшений.
«Большинство людей знают о клинической работе, которую мы проводим со спортсменами», – сказал Хейворд. «Но не так хорошо известно, что мы также много работаем с действующими членами сообщества специальных операций. Мы обеспечиваем их физиотерапией, тренировками и питанием ».
«Но не так хорошо известно, что мы также много работаем с действующими членами сообщества специальных операций. Мы обеспечиваем их физиотерапией, тренировками и питанием ».
Именно эта работа с сообществом специальных операций особенно заинтересовала научного сотрудника IHMC Дон Кернагис.
«Поскольку мы расширили наши исследования биологических способов расширения возможностей и устойчивости высокопроизводительных людей в вооруженных силах, особенно тех, кому приходится работать в экстремальных условиях, партнерство с AREF имело смысл», – сказал д-р.Кернагис, возглавляющий десяток членов биомедицинской команды IHMC.
Ближайшие планы включают совместную работу сотрудников IHMC и AREF над текущими исследовательскими проектами, а также разработку предложений для будущих проектов и грантов.
Для получения дополнительной информации о AREF посетите: https://www.andrewsref.org
Райан Тилли назначен членом Совета директоров Союза экономического развития Флориды-Запад
FloridaWest EDA рада сообщить, что Райан Тилли из Флоридского института познания человека и машин был назначен в совет директоров FloridaWest Комиссией округа Эскамбия. Тилли присоединяется к Карен Синдел в качестве одного из двух назначенных графством, чтобы служить сообществу в совете альянса экономического развития.
Тилли присоединяется к Карен Синдел в качестве одного из двух назначенных графством, чтобы служить сообществу в совете альянса экономического развития.
Райан в настоящее время является директором по реализации стратегических программ и инноваций в Флоридском институте познания человека и машин (IHMC), а также является партнером двух компаний, занимающихся разработкой программного обеспечения в Пенсаколе. До прихода в IHMC Райан был главным операционным директором VetCV Inc., компании по разработке программного обеспечения, ориентированной на поддержку ветеранов и их семей.
Райан также был операционным директором KontactIntelligence Inc., ведущей программной платформы для набора врачей в сфере здравоохранения.
Райан получил степень магистра делового администрирования, а также степень бакалавра наук в области финансов и мировой экономики в Университете Западной Флориды. Он также получил диплом магистра в области предпринимательства в Университете Западной Флориды. Он женат на своей прекрасной жене Келли, и вместе у них двое замечательных сыновей.
Он женат на своей прекрасной жене Келли, и вместе у них двое замечательных сыновей.
«Обладая опытом работы с технологическими компаниями, Райан Тилли станет ключевым активом нашего совета директоров», – сказал Скотт Лут, FloridaWest.«Сейчас, когда мы сосредоточены на создании объектов кибербезопасности в округе Эскамбия, мы с нетерпением ждем возможности работать с Райаном для создания рабочих мест и открытия нового бизнеса».
«Мне очень нравится регион Северо-Запад Флориды, – сказал Райан, – и я надеюсь на успешное, устойчивое и ответственное экономическое развитие нашего сообщества».
Скачать PDF Пресс-релиз
Самая важная инновационная компания, открытая в Окале за последние 20 лет.
В февральском выпуске журнала Ocala Style за 2019 год IHMC назван самой важной инновационной компанией, открытой в Окале за последние 20 лет. Вы можете прочитать статью здесь, https://issuu.com/ocalastyle/docs/0219os_book/32
Генеральный директор IHMC назначен в Комиссию национальной безопасности по искусственному интеллекту
Доктор Кеннет М. Форд из Пенсаколы, генеральный директор и соучредитель Флоридского института познания человека и машин (IHMC), был назначен членом элитной группы лидеров отрасли в недавно сформированной Комиссии национальной безопасности по искусственному интеллекту. .
Форд из Пенсаколы, генеральный директор и соучредитель Флоридского института познания человека и машин (IHMC), был назначен членом элитной группы лидеров отрасли в недавно сформированной Комиссии национальной безопасности по искусственному интеллекту. .
Созданная в соответствии с Законом о государственной обороне на 2019 год, независимая федеральная комиссия, как ожидается, будет рассматривать глобальные достижения, инвестиции и стратегии в области искусственного интеллекта (ИИ) и связанных технологических систем, оценивать зарубежные разработки и инвестиции в ИИ и рекомендовать меры, принятые Соединенными Штатами. Государства могут использовать свои технологические преимущества, обеспечивая при этом национальную безопасность и конкурентоспособность. В числе своих задач Комиссия рассмотрит использование ИИ в военных целях, рассмотрит «этические соображения», которые могут возникнуть в результате достижений в технологиях ИИ, и оценит возможности для стимулирования исследований в области ИИ и инвестиций в развитие персонала.
Признанный пионер в области машинного познания и систем искусственного интеллекта, участие доктора Форда в Комиссии принесет особое понимание революционных инноваций в области машинного обучения, кибер-интеллекта и безопасности, робототехники, сенсорной замены и интеллектуального анализа данных, а также продемонстрирует процветающий искусственный интеллект и защиту. -связанная с отраслью деятельность, происходящая во Флориде.
«Америка сталкивается с невероятными проблемами, поскольку технический прогресс меняет наши сообщества, нарушает наши рабочие места и угрожает нашей национальной безопасности», – сказал У.Сенатор Марко Рубио. «В течение почти трех десятилетий доктор Форд был в авангарде понимания этих изменений и того, как они влияют на нашу страну и мир. Его назначение в Комиссию национальной безопасности по искусственному интеллекту вполне заслужено и вселяет во меня уверенность, что наша страна способна адаптироваться, процветать и процветать для будущих поколений ».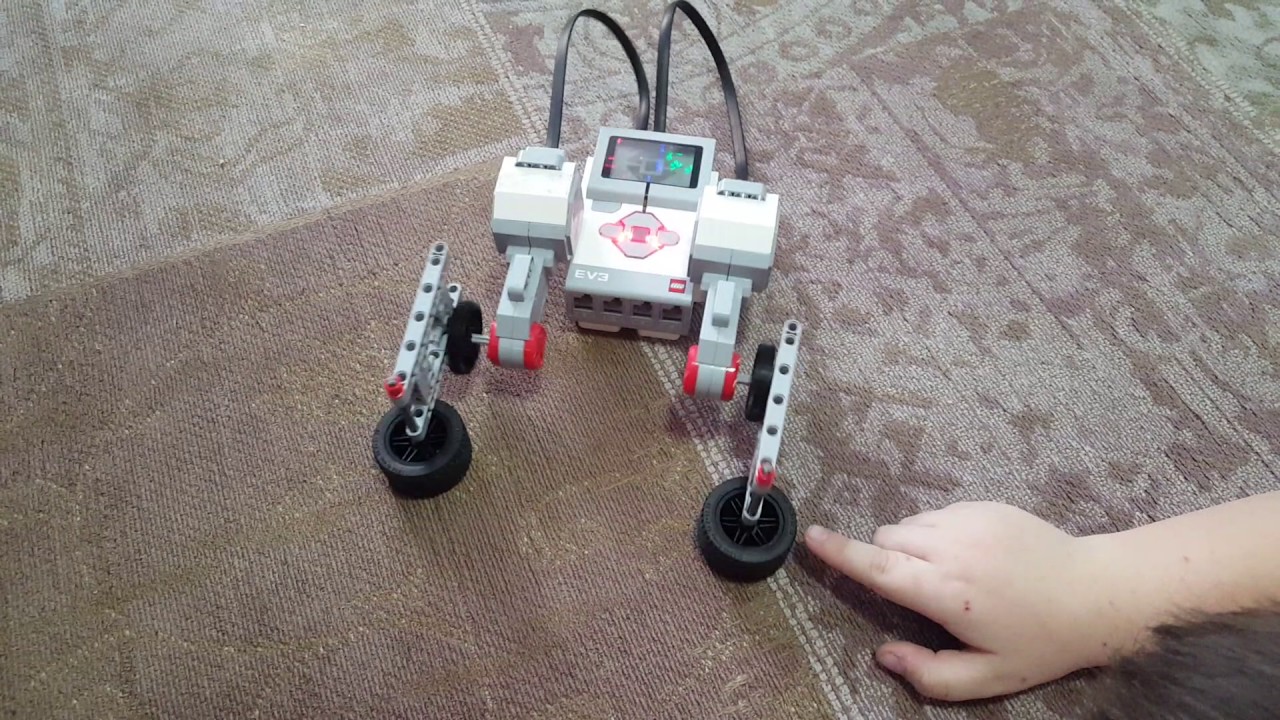
Комиссию, состоящую из 15 членов, возглавит бывший генеральный директор и председатель Google Эрик Шмидт. В нее войдут высшие руководители Oracle, Amazon и Microsoft, а также высокопоставленные представители технологических, разведывательных и оборонных секторов.
«Для меня большая честь быть частью этой выдающейся группы, поскольку мы стремимся рассмотреть направление и влияние технологий искусственного интеллекта на национальную безопасность и конкурентоспособность», – сказал Форд. «Для нас как нации стало критически важно понять значение ИИ и важность стратегических инвестиций в него, и я надеюсь, что эта Комиссия сможет определить проблемы и возможности, связанные с этой постоянно развивающейся областью. . »
Имея 10 миллионов долларов, выделенных на ее работу, Комиссии поручено подготовить отчет для президента и Конгресса с рекомендациями в отношении «действий исполнительной власти и Конгресса в отношении искусственного интеллекта, машинного обучения и связанных с ними технологий.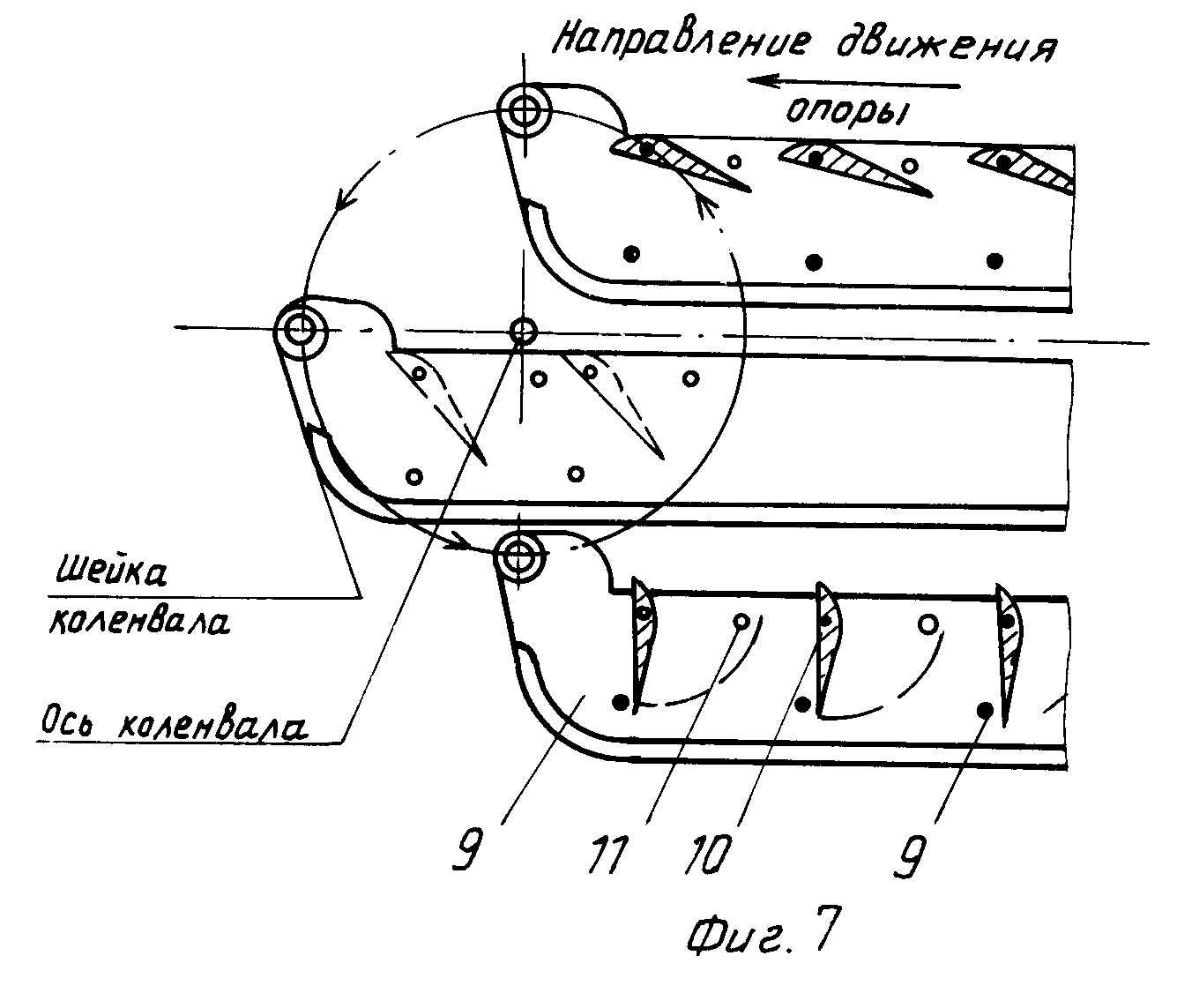 ». Выводы и рекомендации Комиссии быстро отслеживаются: первоначальный отчет должен быть представлен в течение 90 дней, а годовые отчеты – в августе 2019 и 2020 годов.
». Выводы и рекомендации Комиссии быстро отслеживаются: первоначальный отчет должен быть представлен в течение 90 дней, а годовые отчеты – в августе 2019 и 2020 годов.
Доктор Форд входил в состав ряда высших национальных советов и комиссий, включая Совет по оборонной науке, Национальный совет по науке и Консультативный совет по науке ВВС. Он входил в Совет по передовым технологиям (ATB), который поддерживает Управление директора национальной разведки, и был председателем Консультативного совета НАСА.Журнал Florida Trend назвал его одним из четырех самых влиятельных граждан Флориды в академических кругах. Форд также был награжден медалью НАСА «За выдающиеся заслуги перед обществом», что является высшей наградой, которую присуждает агентство. В 2018 году он был введен в Зал славы изобретателей Флориды.
Основанный доктором Фордом в 1990 году в Университете Западной Флориды и зарегистрированный как некоммерческий исследовательский институт в рамках системы государственного университета в 2003 году Законодательным собранием Флориды, IHMC является домом для ведущих ученых и инженеров.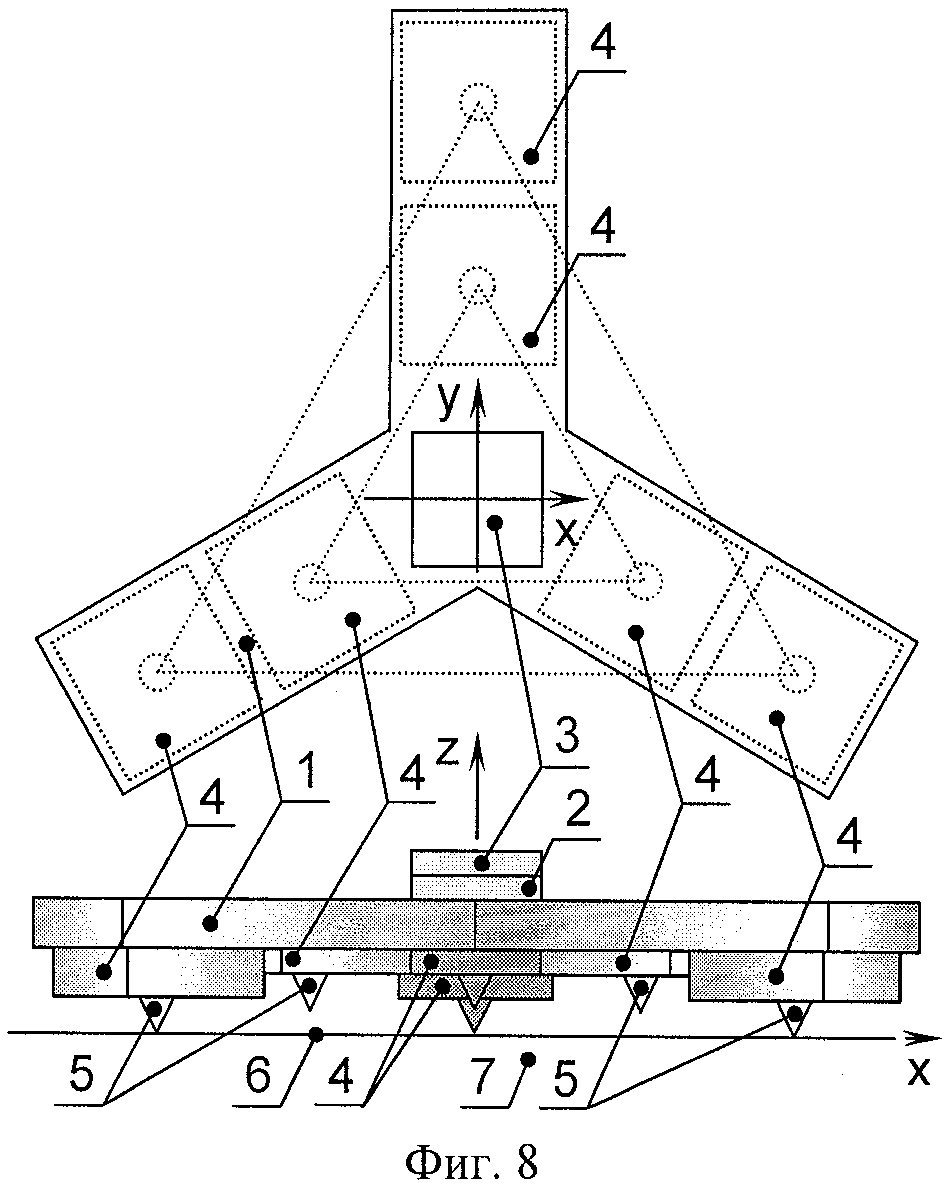 занимается передовыми разработками в области искусственного интеллекта, робототехники, взаимодействия человека с машиной, когнитивной психологии, информатики и производительности человека.Исследователи IHMC переосмысливают отношения между людьми и машинами и определяют новые направления в ориентированных на человека вычислениях. IHMC активно сотрудничает с отраслевыми, правительственными и университетскими партнерами для разработки сложных технологий, которые могут способствовать достижению более широких целей общества. Благодаря своей новаторской работе с НАСА, Министерством обороны, DARPA и рядом партнеров из частного сектора, IHMC заслужил мировое признание.
занимается передовыми разработками в области искусственного интеллекта, робототехники, взаимодействия человека с машиной, когнитивной психологии, информатики и производительности человека.Исследователи IHMC переосмысливают отношения между людьми и машинами и определяют новые направления в ориентированных на человека вычислениях. IHMC активно сотрудничает с отраслевыми, правительственными и университетскими партнерами для разработки сложных технологий, которые могут способствовать достижению более широких целей общества. Благодаря своей новаторской работе с НАСА, Министерством обороны, DARPA и рядом партнеров из частного сектора, IHMC заслужил мировое признание.
IHMC – финалист Toyota Mobility Challenge
ПЯТЬ ВИДЕНИЙ НА БУДУЩЕЕ МОБИЛЬНОСТИ, ВКЛЮЧАЯ ОДИН ОТ IHMC, ОБЪЯВЛЕННЫЙ НА CES
- Toyota Mobility Foundation в партнерстве с Nesta’s Challenge Prize Center объявляет финалистов глобального конкурса Mobility Unlimited Challenge стоимостью 4 миллиона долларов на выставке CES в Лас-Вегасе
- Новаторы со всего мира представили революционные технологии для улучшения жизни людей с параличом нижних конечностей
- Финалисты включают команды из США, Японии, Италии и Соединенного Королевства с различными устройствами, от гибридного экзоскелета на колесах до системы совместного использования инвалидной коляски с электроприводом
- IHMC – один из пяти финалистов, получивших грант в размере 500 000 долларов США на дальнейшее развитие своей идеи. Окончательный победитель получит 1 миллион долларов в 2020 году в Токио
 Окончательный победитель получит 1 миллион долларов в 2020 году в Токио
Окончательный победитель получит 1 миллион долларов в 2020 году в Токио Лас-Вегас, Невада, США (7 января 2019 г.) – Пять финалистов трехлетнего конкурса Mobility Unlimited Challenge были представлены на выставке Consumer Electronics Show в Лас-Вегасе. В 2017 году фонд Toyota Mobility Foundation в партнерстве с Nesta’s Challenge Prize Center запустил глобальную программу стоимостью 4 миллиона долларов США с целью улучшить жизнь миллионов людей с параличом нижних конечностей.
The Challenge пригласил инженеров, новаторов и дизайнеров со всего мира представить проекты революционных технологий, включающих интеллектуальные системы, чтобы улучшить мобильность и независимость людей с параличом нижних конечностей.Центральное место в Вызове занимает важность сотрудничества с конечными пользователями для разработки устройств, которые будут легко интегрироваться в жизнь и среду пользователей, при этом быть удобными и простыми в использовании, обеспечивая большую независимость и большее участие в повседневной жизни.
Каждый из пяти финалистов получит грант в размере 500 000 долларов США на дальнейшее развитие своей концепции, а финальный победитель конкурса получит 1 миллион долларов США в Токио в 2020 году.
Пять финалистов:
- Evowalk: Evolution Devices (США) – умный носимый рукав для ног, который помогает людям с частичным параличом нижних конечностей восстановить подвижность.Система EvoWalk AI использует датчики для прогнозирования движений пользователя при ходьбе и стимулирует нужные мышцы в нужное время, чтобы помочь им лучше ходить.
- Moby: Italdesign (Италия) – интегрированная сеть устройств с приводом на колесах, предоставляющая пользователям инвалидных колясок с ручным управлением удобство и преимущества кресла с электроприводом, доступная через схему совместного использования на основе приложений.
- Phoenix Ai Сверхлегкая инвалидная коляска: Phoenix Instinct (Великобритания) – сверхлегкая самобалансирующаяся интеллектуальная инвалидная коляска, которая устраняет болезненные вибрации.
- Qolo (Качество жизни с движением): Team Qolo, Университет Цукуба (Япония) – мобильный экзоскелет на колесах, позволяющий пользователям с легкостью сидеть или стоять.
- Quix: IHMC & MYOLYN (США) – роботизированный экзоскелет с электроприводом с двигателями на бедрах, коленях и лодыжках, а также дополнительными исполнительными механизмами, обеспечивающими быструю, стабильную и маневренную вертикальную подвижность человеку с параличом нижних конечностей. Используя модульное срабатывание, технологию восприятия от автономных транспортных средств и алгоритмы управления для балансировки автономных гуманоидных роботов, это устройство обеспечит мобильность, безопасность и независимость, недоступные нынешним экзоскелетам.Устройство улучшит доступность в обществе – особенно дома и на работе.
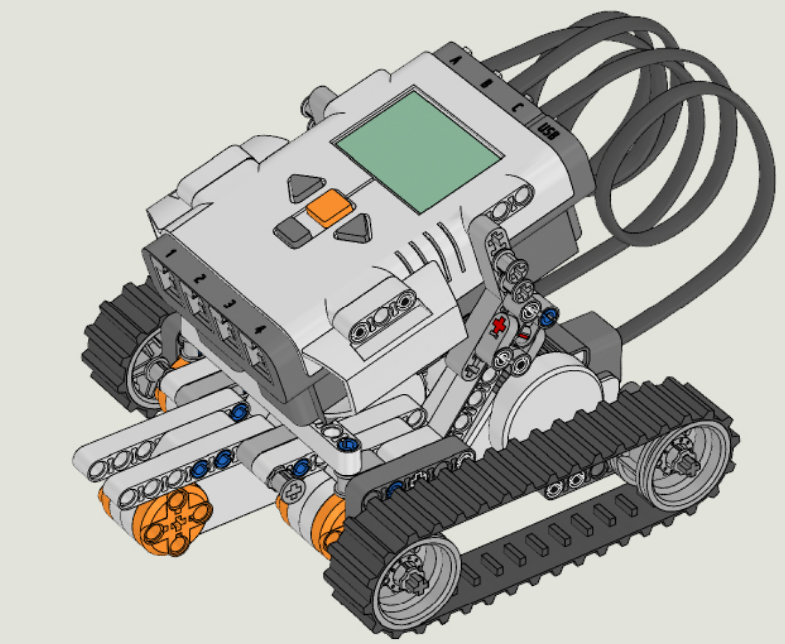
«Мы очень рады стать одним из пяти финалистов конкурса Mobility Unlimited Challenge», – сказал старший научный сотрудник IHMC Питер Нойхаус, возглавляющий группу IHMC и Myolyn.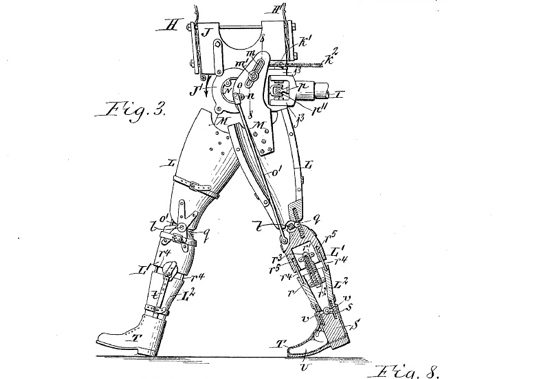 «В деловом мире разработка технологий для людей с параличом нижних конечностей была чрезвычайно сложной задачей. Мы постоянно боролись с людьми, которые говорили, что рынок слишком мал, и из-за этого люди не прилагают усилий, исследований или инвестиций, которых заслуживает эта область, а это означает, что не было достаточного прогресса.”
«В деловом мире разработка технологий для людей с параличом нижних конечностей была чрезвычайно сложной задачей. Мы постоянно боролись с людьми, которые говорили, что рынок слишком мал, и из-за этого люди не прилагают усилий, исследований или инвестиций, которых заслуживает эта область, а это означает, что не было достаточного прогресса.”
Myolyn – это медицинская технологическая компания, базирующаяся в Гейнсвилле, штат Флорида, деятельность которой направлена на улучшение здоровья и работоспособность человека. IHMC – это некоммерческий исследовательский институт Университетской системы Флориды, который является пионером технологий, направленных на использование и расширение человеческих возможностей.
Восемьдесят работ были получены от команд специалистов из 28 стран мира. Финалисты были выбраны группой экспертов-судей со всего мира.
Доктор Эрик Кротков, главный научный сотрудник научно-исследовательского института Toyota и один из судей конкурса, заявил: «Существует так много технологических возможностей для изучения подходов к решению проблем, связанных с параличом нижних конечностей.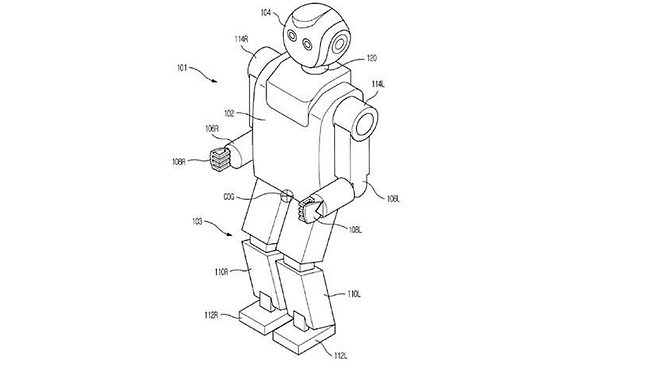 Такое соревнование, как Mobility Unlimited Challenge, заставляет новаторов сосредоточиться на одной и той же проблеме, чтобы определить что-то представляющее общий интерес, которое служит обществу. Я в восторге от этих финалистов, у которых есть широкий спектр технических решений – инвалидные коляски, ортопедические приспособления, подтяжки, экзоскелеты. Я с нетерпением жду возможности увидеть, как они выведут эти устройства из стадии разработки, чтобы помочь нашим конечным пользователям ».
Такое соревнование, как Mobility Unlimited Challenge, заставляет новаторов сосредоточиться на одной и той же проблеме, чтобы определить что-то представляющее общий интерес, которое служит обществу. Я в восторге от этих финалистов, у которых есть широкий спектр технических решений – инвалидные коляски, ортопедические приспособления, подтяжки, экзоскелеты. Я с нетерпением жду возможности увидеть, как они выведут эти устройства из стадии разработки, чтобы помочь нашим конечным пользователям ».
В дополнение к гранту в размере 500 000 долларов США финалисты будут посещать специализированные семинары, получать возможности наставничества с техническими экспертами и сотрудничать с конечными пользователями для дальнейшего развития своих концепций до 2020 года.
Во всем мире миллионы людей живут с параличом нижних конечностей (наиболее частыми причинами являются инсульты, травмы спинного мозга и рассеянный склероз). Хотя в мире нет статистических данных о параличе, по оценкам Всемирной организации здравоохранения, ежегодно во всем мире регистрируется от 250 000 до 500 000 новых случаев травм спинного мозга.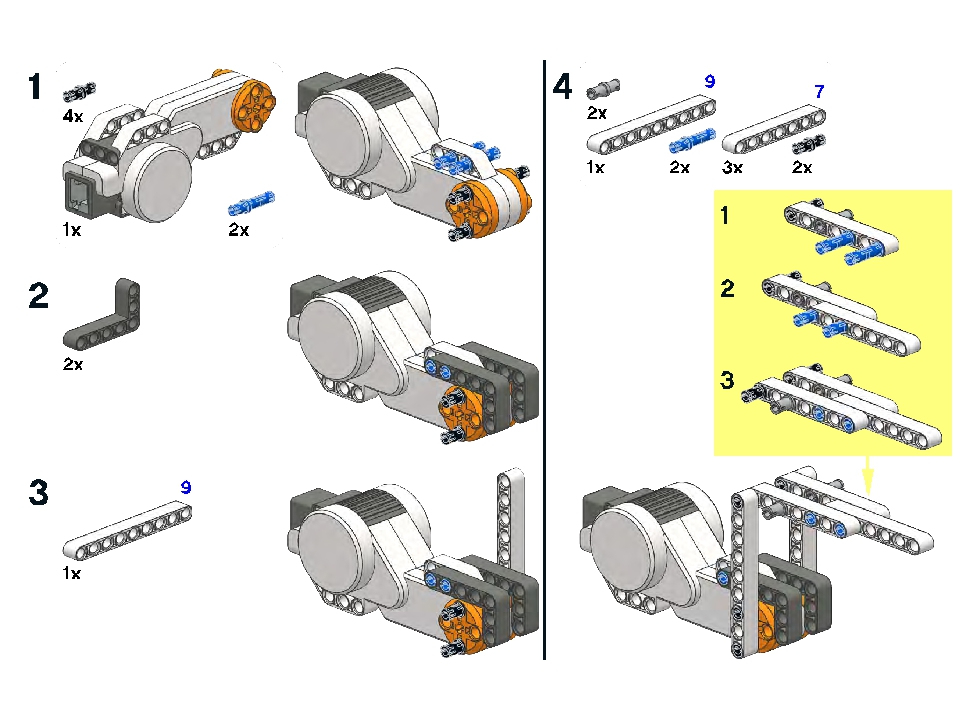
UWF сотрудничает с IHMC в разработке первых интеллектуальных систем и робототехники. Доктор философии. во Флориде
Университет Западной Флориды в партнерстве с Институтом познания человека и машин, расположенным в центре Пенсаколы, разработал докторскую программу по интеллектуальным системам и робототехнике.Программа будет первой в своем роде во Флориде и одной из немногих в стране.
«Мы очень рады этой новой программе докторантуры», – сказала президент UWF Марта Д. Сондерс. «Программа объединяет сильные стороны инженерных и компьютерных программ UWF с опытом исследовательского центра мирового уровня, IHMC. Это изменит правила игры “.
Новая докторская программа согласуется со стратегическим видением Университета в отношении исследований, которые влияют на экономическое развитие Северо-Западной Флориды и технологические предприятия.Он будет обслуживать обрабатывающую промышленность, здравоохранение, оборону и другие высокотехнологичные отрасли, обеспечивая критически важную поддержку в востребованных областях карьеры.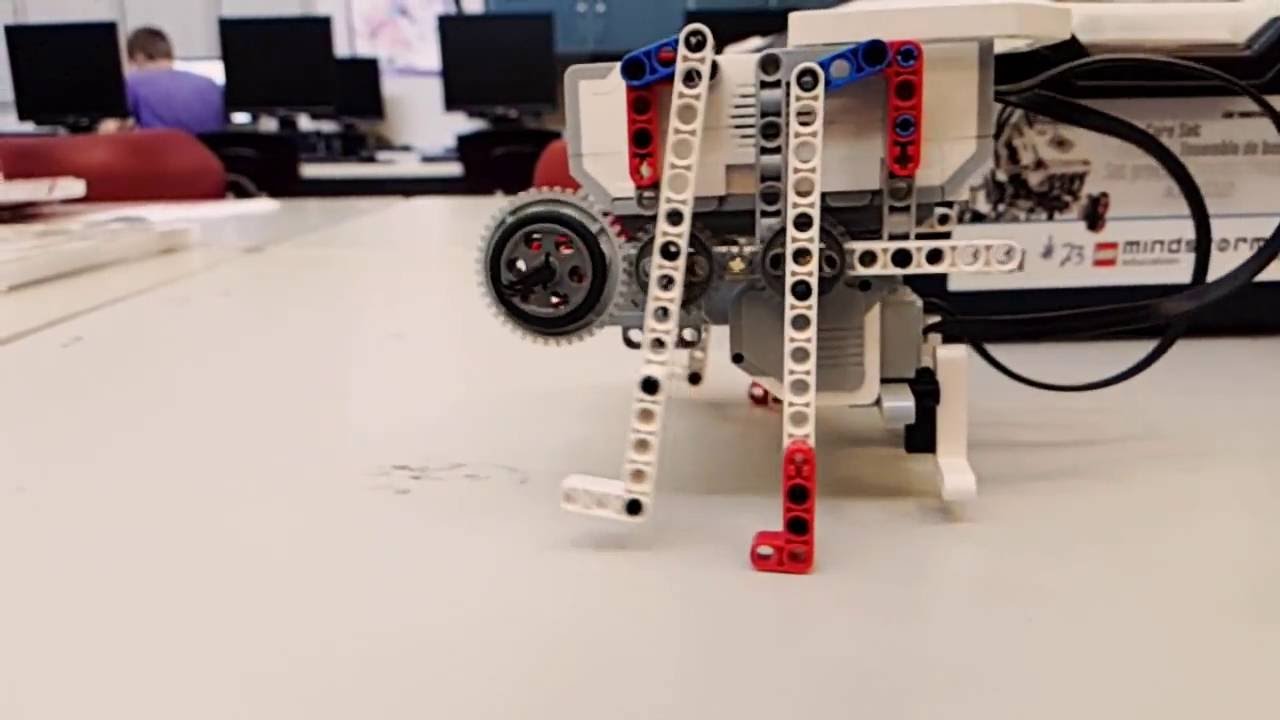
«Я давно представлял себе такую программу, – сказал Кен Форд, директор и соучредитель IHMC. «Это привлечет лучшие молодые таланты со всего мира. Это такой большой шаг не только для UWF и IHMC, но также для Пенсаколы и штата ». Согласно исследованию, проведенному в 2012 году Национальной робототехнической инициативой, робототехника может изменить будущее Соединенного Королевства.S. и ожидается, что в ближайшие десятилетия он станет таким же повсеместным, как и компьютерные технологии сегодня. Справочник по профессиональным перспективам Бюро статистики труда США прогнозирует 19-процентный рост числа ученых, занимающихся компьютерными и информационными технологиями, в течение следующих 10 лет.
Программа беспилотных летательных аппаратов с Управлением полиции города Пенсакола
Мэр Пенсаколы Эштон Хейворд и IHMC рады объявить об инновационном партнерстве между IHMC и Управлением полиции города Пенсакола в разработке комплексной программы полицейских дронов.
Программа будет включать специализированные дроны в полицейских операциях, таких как поиск и спасение, реагирование на стихийные бедствия, уклонение от бегства, опасные ситуации и наблюдение за событиями на открытом воздухе.
«Это замечательная программа, которая сделает Пенсаколу более безопасным сообществом», – сказал Хейворд. «И поскольку у нас есть опыт IHMC здесь, в нашем сообществе, мы также будем играть ведущую роль с точки зрения использования этих специализированных дронов в борьбе с преступностью и в том, чтобы сделать наше сообщество более безопасным.”
В то время как стандартные дроны доступны правоохранительным органам, многие из них не подходят для критически важных государственных служб, таких как полицейские операции. Большинство дронов также не могут выполнять миссии, которые выполняются в зданиях или вокруг них.
IHMC в течение многих лет разрабатывает технологию, которая хорошо подходит для создания индивидуальных дронов, которые могут быть эффективными инструментами для нужд правоохранительных органов. IHMC и полицейское управление Пенсаколы также будут работать вместе над разработкой учебной программы по использованию этих специализированных дронов.
IHMC в Пенсаколе – это некоммерческий исследовательский институт, который превратился в одну из ведущих исследовательских организаций страны с учеными и инженерами мирового уровня, исследующими широкий круг тем, связанных с созданием технологических систем, направленных на усиление и расширение познания человека. , восприятие, движение и устойчивость. Институт является частью университетской системы Флориды и имеет филиал в Окале. «Большинство людей знают о нашей работе с роботами, НАСА и различными видами вооруженных сил», – сказал Кен Форд, генеральный директор IHMC.«Но это отличный пример того, как опыт наших ученых используется прямо здесь, в Пенсаколе, на благо нашего сообщества».
Центр исследований IHMC им. Левина получил приз зрительских симпатий AIA Florida
Флоридская ассоциация Американского института архитекторов на этой неделе опубликовала окончательные результаты конкурса «Выбор народа Флориды», и благодаря многим из вас Центр исследований Левина IHMC победил.В течение последних нескольких недель мы рассылали запросы, в которых просили людей выйти в Интернет и проголосовать за Центр Левина в конкурсе AIA. Мы действительно ценим это так многими людьми.
Центр Левина площадью 30 000 квадратных футов был спроектирован фирмой Quina Grundhoefer в Пенсаколе и построен в 2016 году. Мы также очень благодарны юристу Пенсаколы Фреду Левину, который пожертвовал 1 миллион долларов IHMC, чтобы помочь институту завершить строительство объекта.
Картер Куина был ведущим архитектором проекта и получил отличную цитату после того, как услышал новости о премии «Выбор народа».«Как архитекторы, нам, конечно, нравится, когда коллеги оценивают нашу работу и узнают нас. Но еще более особенным является признание вашего дизайна обычными людьми. Если людям нравится то, что мы разработали, значит, мы сделали свое дело. Это действительно большая честь для нас и Пенсаколы ».
Вот пресс-релиз AIA Florid
Кернагис получает премию выдающегося молодого ученого
Ученый-исследователь IHMC Дон Кернагис в 2018 г. является лауреатом Премии молодых ученых / врачей, ежегодно присуждаемой Обществом подводной и гипербарической медицины.
Награда, которая была вручена на ежегодном банкете общества в Орландо, отмечает работу молодого ученого, чья деятельность неизменно выдающаяся.
«Я безмерно благодарен за эту награду», – сказал Кернагис. «Мне повезло, что я был окружен вдохновляющими коллегами и советниками, когда я переходил от ныряльщика на полную ставку к исследователю, работающему на полную ставку. Это такой неожиданный сюрприз ».
Кернагис, занесенная в Зал славы женщин-дайверов в 2016 году, в начале своей карьеры занималась дайвингом и руководила подводными исследованиями и природоохранными проектами по всему миру.Она провела более десяти лет с командой дайверов, исследуя Вакулла-Спрингс и его глубоководные пещеры. Она также была выбрана в 2016 году, чтобы стать одним из шести членов экипажа подводной миссии НАСА, NEEMO 21.
Кернагис пришла в IHMC после получения докторской степени в Университете Дьюка. Она и ее коллеги из института сосредоточены на поиске способов оптимизации производительности и устойчивости людей, работающих в экстремальных условиях.
В настоящее время она руководит исследованием Управления военно-морских исследований по изучению потенциального человеческого топлива для работы в холодной воде.Она также возглавляет финансируемое NASA Translational Institute исследование того, как лимфатическая система мозга реагирует на симулированную микрогравитацию.
Помимо своего исследования, Кернагис является соучредителем подкаста IHMC STEM-Talk с основателем и директором института Кеном Фордом. IHMC, некоммерческий исследовательский институт, входящий в систему Университета Флориды, является пионером технологий, направленных на использование и расширение человеческих возможностей.
«Dawn, безусловно, заслуживает этой награды», – сказал Форд.«Она действительно выдающийся ученый, и ее коллеги в IHMC очень за нее рады. Это еще один пример высокого уровня талантов, которым нам так повезло в институте ».
Общество подводной и гипербарической медицины – это организация, базирующаяся в США, которая поддерживает исследования в области гипербарической медицины и физиологии.
Levin Centre for IHMC Research номинирован на архитектурную премию
Центр исследований Левина IHMC – одно из 39 зданий, номинированных на пятый ежегодный конкурс «Выбор народа», проводимый Флоридской ассоциацией Американского института архитекторов и Флоридским фондом архитектуры.
Люди со всего мира могут проголосовать онлайн за Центр Левина, а также за другие свои любимые здания во Флориде. Номинированные здания были построены за последние пять лет и вносят свой вклад в счастье и процветание жителей Флориды.
Центр Левина площадью 30 000 квадратных футов был спроектирован Quina Grundhoefer Architects и получил награду за выдающиеся достижения на прошлогоднем собрании Северо-западного отделения Флориды Американского института архитекторов.
Помогите разместить Пенсаколу на карте, выйдите в сеть до 20 июля и проголосуйте за Центр Левина на floridapeopleschoice.com. Здания перечислены по названию строения и городу. Результаты голосования будут объявлены 21 июля на ежегодном съезде Американского института архитекторов во Флориде.
Ewers жертвует 500 000 долларов IHMC
Рон и Филлис Эверс пожертвовали 500 000 долларов Флоридскому институту познания человека и машин – подарок, который позволит исследовательскому центру внести необходимые улучшения в свое застекленное здание в центре Окалы.
Здание IHMC в Окале когда-то было домом для главного отделения системы публичных библиотек округа Мэрион. Построенное в 1960-х годах здание в футуристическом стиле стало центром центра города Окала. В 2009 году тогда вакантный объект попал в руки IHMC, некоммерческого исследовательского института, который является частью Университетской системы Флориды с филиалами в Окале и Пенсаколе.
«Я был так рад, что IHMC переехал в это здание», – сказал Эверс, который переехал в Окалу в 1970-х годах и входит в совет директоров института.«Здание и работа, которая ведется в институте, действительно стали одной из жемчужин Окалы».
Одной из отличительных особенностей здания является световой люк в центре крыши. Но спустя 60 лет стекло в крыше приобрело дымный вид.
«Благодаря этому подарку мы сможем заменить крышу и световой люк», – сказала Лори Зинк, директор по развитию и работе с общественностью компании Ocala. «Мы сможем сделать и другие улучшения в здании.Нам так повезло, что в нашем сообществе есть такие люди, как Рон и Филлис ».
Эверс является президентом Ewers Consulting в Окале и совладельцем ряда компаний, включая Classic Fire, которая известна своими инновациями в противопожарном оборудовании. До этого он был президентом E-One, одного из крупнейших мировых производителей пожарных машин и оборудования.
На протяжении многих лет Эверс и его жена также помогали финансировать информационно-просветительские программы IHMC, которые варьируются от вечерних лекций до «Субботы науки» – практической научной программы для учеников третьего, четвертого и пятого классов.
«Быть членом совета директоров IHMC – это просто большая честь, – сказал Эверс. «Институт действительно стал отличным дополнением к Окале».
Создайте своего первого робота – с планами и пошаговыми инструкциями
Я хотел начать создавать роботов в тот момент, когда увидел классику научно-фантастического фильма День, когда Земля остановилась (оригинал, заметьте, а не римейк). Моя первая попытка, вскоре после этого, была сделана из ничего, кроме случайных частей телевизора и обрывков проводов, которые я выудил из ящика для электроники моего отца.Машина на самом деле ничего не делала, кроме как доставила мне неприятности. Мой отец сообщил мне, что эти “случайные” детали на самом деле были довольно дорогими кинескопами RCA.
Тем не менее, это был мой первый робот, а вашего первого робота вы никогда не забудете. Наблюдать за тем, как ваше творение делает что-то столь же простое, как бегать по полу, волнует, особенно если вы построили его с нуля.
Такие компании, как Lego и Vex, предлагают недорогие сборные комплекты робототехники, нацеленные на детей и преподавателей, но вы получите гораздо больше гибкости в долгосрочной перспективе, научившись создавать настоящего робота DIY, работающего с цепями и сервоприводами.Кроме того, его собрать никогда не было дешевле и проще, а результат ваших усилий значительно превзойдет то, что было возможно даже пять лет назад. (Поверьте мне, я занимаюсь этим уже более 20 лет.) Лучше всего то, что роботостроение предлагает то, что становится все более редким в мире электроники: возможность создать движущуюся работающую машину голыми руками. Я работал с Popular Mechanics, чтобы разработать проект робота, который может выполнить любой, обладающий небольшими техническими навыками, даже если вы никогда раньше не создавали бота.Он доступен по цене, легко расширяется и доставляет массу удовольствия.
Определение ботаНаш двухэтажный бот для начинающих использует миниатюрный компьютеризированный мозг, чтобы перемещаться по полу, не забывая о ближайших препятствиях. Если он (мягко) ударяет что-то или кого-то, робот издает извиняющуюся мелодию, отступает и отправляется в новом направлении. С точки зрения базового поведения это немного похоже на беспилотный пылесос Roomba. Робототехникам, работающим своими руками, такие машины известны как бродячие роботы.
Мы также разработали робота для работы практически с любым универсальным пультом дистанционного управления, поэтому вы можете вручную управлять своим роботом, чтобы он останавливался, запускался и поворачивался. Мы постарались сохранить разумный уровень амбиций: на его создание должно уйти 2 часа или меньше, и для этого не нужны специальные инструменты. Нет никакой схемы сборки, и нужна только простая пайка.
В основе нашего бота лежит плата микроконтроллера Arduino за 30 долларов, которая достаточно мала, чтобы питаться от 9-вольтовой батареи. Этот микроконтроллер служит небольшим программируемым компьютером, который соединяет программное обеспечение с реальными, реальными функциями.Программы или наброски (на языке Arduino) говорят микроконтроллеру, что делать. Вы используете персональный компьютер для создания эскизов, затем эти эскизы загружаются через USB-кабель во внутреннюю память микроконтроллера. Эскизы могут выполнять такие действия, как запуск двигателей или мониторинг состояния переключателей и датчиков.
Мы выбрали микроконтроллер Arduino, потому что он разработан специально для проектов DIY, подобных нашему, и потому, что он имеет открытый исходный код, а это означает, что его аппаратное и программное обеспечение открыто для модификации и не требует лицензионных сборов.Поскольку он снижает входной барьер для робототехники практически во всех смыслах, от стоимости до сложности, Arduino становится чем-то вроде суперзвезды в мире создателей ботов.
Программное обеспечение для программирования микроконтроллера можно бесплатно загрузить с официального сайта Arduino, и его относительно легко использовать, поскольку оно было разработано не только для программистов. Он работает как на ПК, так и на Mac и включает интуитивно понятные инструменты, которые позволяют разработчикам ботов загружать и устанавливать готовые программы.Активное сообщество пользователей Arduino даже разработало сверхпростые приложения с графическим программным обеспечением, такие как Modkit и Minibloq. Это облегчает обучение не только Arduino, но и базовому программированию в целом.
Arduino подключается к оборудованию вашего робота через макетную плату. Это устройство, также известное как коммутационная панель, направляет электронные сигналы от одной части робота к другой. Макетные платы позволяют легко подключать все быстро и реконструировать соединения на лету, не склеивая все вместе.Это своего рода коммутатор для сервоприводов, датчиков, переключателей и процессора вашего робота. Если Arduino – это мозг бота, то это его нервная система.
Наш бот использует два мотор-редуктора для приведения в движение, со свободно вращающимся колесиком впереди. Эти двигатели представляют собой специализированные версии радиоуправляемых сервоприводов, обычно используемых на моделях самолетов. Вместо того, чтобы повернуться всего на несколько градусов, они продолжают вращаться. Этот тип двигателя – сервопривод непрерывного вращения – является недорогим и легко монтируется на винты. Сервоприводы расположены на дне двух колод, разделенных подъемными концами.Двухъярусная конструкция оставляет достаточно места для установки электроники. А теперь приступим.
>
Начало сборки >>>
Начало сборкиВы можете сконструировать корпус BYFR , используя кусок авиационной фанеры или листового пластика размером 9 на 12 дюймов 1/4 дюйма. Моторизованная спиральная пила ускорит работу.Я предпочитаю просечно-вытяжной лист из жесткого ПВХ. Его легко резать и сверлить, и он бывает ярких цветов. Найдите его в Интернете или посетите местный магазин по изготовлению вывесок.
Полный список деталей, инструкции, а также ответы на часто задаваемые вопросы, шаблоны, эскизы и дополнительные полезные материалы можно найти здесь. Затем щелкните ссылку ниже, чтобы перейти к пошаговой инструкции по сборке.
>
Пошаговые планы >>>
Этот контент создается и поддерживается третьей стороной и импортируется на эту страницу, чтобы помочь пользователям указать свои адреса электронной почты.Вы можете найти больше информации об этом и подобном контенте на сайте piano.io.
Моделирование, обратная динамика и управление графиком усиления
В этой статье представлен план управления на основе эталонной модели для двуногого шагающего робота с 10 степенями свободы с использованием нелинейного планирования усиления. Основная цель состоит в том, чтобы показать, что модели сосредоточенной массы могут использоваться для прогнозирования требуемых крутящих моментов в суставах для двуногого шагающего робота. Относительно сложная архитектура, высокая степень резкости и требования к балансировке усложняют задачу управления этими роботами.Хотя методы линейного управления могут использоваться для управления двуногими роботами, нелинейное управление необходимо для повышения производительности. Акцент этой работы состоит в том, чтобы показать, что эталонная модель может быть моделью двуногой ходьбы с сосредоточенной массой в центре тяжести, что устраняет проблемы, связанные с проектированием псевдообратной системы. Еще одно значение этого подхода – снижение требований к расчету за счет упрощенной процедуры расчета номинальных моментов затяжки. Обсуждается кинематический и динамический анализ, включая результаты для крутящих моментов в суставах и силы грунта, необходимых для выполнения предписанного движения ходьбы.Этот анализ сопровождается сравнением с экспериментальными данными. Описываются обратный объект и подход к проектированию контроллера на основе линеаризации ошибок слежения. Мы предлагаем новую комбинацию нелинейного планирования усиления с моделью концентрированной массы для системы двуногих роботов MIMO.
1. Введение
Двуногие роботы были одной из центральных тем в течение относительно долгого времени. В 1970-х годах Honda начала широкомасштабные исследования двуногих роботов, за которыми последовали многочисленные исследовательские проекты, выполненные в основном японскими компаниями и университетами.Несмотря на то, что тема исследования относительно старая, технологическая зрелость еще не достигнута, и многие аспекты двуногой шагающей робототехники нуждаются в улучшении. Этот факт свидетельствует о том, что общее проектирование двуногих роботов – очень сложная задача. Это особенно касается аспекта управления роботами. Обычно требуется очень высокая точность отслеживания траектории для выполнения балансировки и достижения достаточно высоких скоростей движения. Для достижения высоких характеристик системы управления в передовых аппаратных реализациях встроена внутренняя модель их кинематики и динамики в главную цифровую компьютерную систему.
Внутренняя модель, работающая одновременно с роботом, принимает ту же информацию о желаемом движении робота, что и реальное оборудование, и на основе динамической модели системы вычисляет требуемые номинальные управляющие входные данные, которые необходимы для реализации желаемых совместных траекторий. .
Понятно, что производительность робота во многом зависит от точности модели, то есть от того, насколько хорошо модель представляет реальную систему. Это причина того, что многие динамические модели были разработаны для двуногих роботов.В следующих парах разделов дается обзор этих моделей с обсуждением преимуществ и недостатков.
Моделирование ходьбы человеческого тела развилось от простых моделей, таких как модель перевернутого маятника [1–3] и модель массы-пружины [4, 5], до относительно сложных моделей, которые включают относительно большое количество степеней свободы [ 6–10]. Основная цель этих моделей – предсказать внутренние и внешние силы во время обычного цикла ходьбы.
Подробные модели человеческого тела могут включать в себя расчеты наиболее важных мышечных сил для определенных типов движений.Однако для робота, который приводится в действие с помощью вращательных двигателей, вычисление конкретных мышечных сил не требуется, а требуется момент, который они создают относительно соответствующих суставов. Есть две основные причины для расчета крутящих моментов в суставах. (A) На основе модели ходьбы можно спрогнозировать максимальные крутящие моменты, которые необходимы для создания определенного движения роботизированной конструкции. Максимальный крутящий момент и максимальная мощность – необходимые данные для выбора шарнирных приводов. Процедура выбора исполнительных механизмов (двигателей) на основе динамической модели робота по своей сути итеративна, поскольку распределение массы и, следовательно, статические и динамические силы существенно зависят от размеров и расположения выбранных исполнительных механизмов.(b) Крутящие моменты в соответствующих суставах для конкретного движения, рассчитанные на основе модели ходьбы, можно использовать для создания номинальных траекторий управления для сложной архитектуры шагающего робота. Эти номинальные траектории могут быть рассчитаны в автономном режиме или в реальном времени с использованием обратной модели предприятия. Преимущество последнего заключается в том, что эталонные (желаемые) траектории могут быть изменены в режиме онлайн в зависимости от условий, налагаемых окружающей средой, а не с учетом заранее рассчитанных эталонных траекторий. Это важно для обхода препятствий, что требует соответствующей корректировки опорных траекторий.
Включение большего количества степеней свободы в модель шагающего робота обычно приводит к более точным результатам, но также приводит к дополнительным усилиям, необходимым для понимания процесса и того, что происходит с внутренними переменными в конструкции робота. В следующих разделах дается обзор упрощенных моделей и общих характеристик более сложной модели.
1.1. Определения и обозначения
Научные отчеты, посвященные двуногим шагающим роботам, регулярно включают многочисленные термины и определения, характерные для этой области.Большинство этих терминов имеют однозначное определение и общеприняты исследователями в данной области; тем не менее, некоторые ключевые термины все еще находятся в процессе прояснения и являются темами исследовательских дискуссий и анализов. Более того, конкретное определение в статье, такое как определение точки нулевого момента (ZMP), может значительно отклоняться от соответствующего определения в другой статье. Поскольку в этой статье также используются некоторые из этих терминов, уместно дать наиболее важные определения.
Очень важной концепцией управления в области двуногой робототехники является концепция так называемой «точки нулевого момента» или сокращенно ZMP. Это точка в зоне контакта ступни с землей, где для динамически устойчивой ходьбы сумма всех моментов относительно любой оси, лежащей в касательной плоскости контакта, равна нулю, включая моменты, обусловленные внешними силами и действующими силами инерции. по архитектуре шагающего робота. Эта концепция была введена Вукобратовичем и др. в 1969 г. [11].
Хотя эта концепция применялась для задач управления двуногими роботами более 30 лет, еще одна концепция, связанная с той же проблемой, была представлена Госвами в 1999 году [12], так называемый «индикатор вращения стопы» или сокращенно FRI. , с целью обобщения концепции ZMP и расширения ее применимости. Индикатор вращения стопы – это точка, в которой должна действовать общая реакция опоры так, чтобы опорная ступня оставалась параллельной земле без какого-либо вращения.
Двуногий робот теряет устойчивость, если точка FRI выходит из зоны контакта ступни с землей, и аналогично, если ZMP достигает края ступни, шаг робота является незначительно устойчивым или нестабильным.Хотя определение ZMP является более общим, наше обсуждение в этой статье будет рассматривать устойчивый цикл ходьбы, где ZMP будет рассматриваться как центр давления (CoP) в области контакта ступни с землей.
Наконец, во время фазы двойной опоры, когда обе ноги соприкасаются с землей, CoP и ZMP могут быть определены путем объединения двух центров давления CoP1 и CoP2, соответствующих отдельным областям контакта с землей.
Эти определения и сокращения будут использоваться в следующих разделах для описания моделей с сосредоточенной и моделей с распределенной массой, а также в разделе проектирования контроллера.
1.2. Модели с сосредоточенной массой
Группа относительно простых прогулочных моделей основана на конструкции перевернутого маятника с вариациями, сочетающими пружину или две пружины и амортизаторы. Простые модели включают одну или две переменные с общей массой, сосредоточенной в точке, центре масс (COM).
Модель шести детерминант [1] использовалась в прошлом для анализа цикла походки человека. Из-за несоответствия теоретическим и экспериментальным результатам эта модель была заменена моделью перевернутого маятника, которая дает результаты, намного более близкие к экспериментальным.Одно из основных несоответствий результатов обычной модели перевернутого маятника с экспериментальными результатами – это нулевой подвод энергии, что означает, что модель не учитывает потерю энергии во время цикла походки.
Более продвинутой, но все же одной из простейших моделей для анализа походки человека является модель перевернутого маятника с пружиной и массой (MSIP) [4]. Масса точки равна общей массе тела, сосредоточенной в центре тяжести. Пружина соединяет точку контакта с землей (центр давления CP) и центр тяжести (CG), и ее отклонения включают в себя все изменения расстояния между точками CP и CG из-за сгибаний / разгибаний бедра, колена, и голеностопные суставы.На рисунке 1 показана концепция представления сложного человеческого тела (или двуногого робота) с помощью модели массы и пружины.
Пружина соединяет центр давления (CP) и центр масс (COM) (a). COM-точку можно рассматривать как очень близкую к бедрам, поскольку ее положение меняется относительно близко к тазобедренному суставу во время обычного цикла ходьбы. Период двойной опоры (b) можно смоделировать с помощью массы и двух пружин, соединяющих COM и центры давлений CP1 и CP2. Однако период двойной поддержки относительно короткий по сравнению с продолжительностью цикла походки и часто может считаться мгновенным.
Помимо этого случая, модель с одной пружиной может покрывать двойной период поддержки, интерпретируя соединение пружины с землей как точку нулевого момента (ZM) (c). Другими словами, суммарный момент и силы для точки ЗМ равны нулю (относительно любой оси, лежащей в касательной плоскости контакта с землей). Представление в пространстве состояний простого перевернутого маятника массы и пружины, показанного на рисунке 2, выглядит следующим образом: где представляет собой радиальное расстояние COM от точки контакта с землей, является радиальной скоростью, является радиальным ускорением, является углом оси пружины относительно вертикальной линии, является угловой скоростью звена между контактом земли и COM, которая приблизительно равна угловой скорости опорной ноги во время фазы ходьбы с одной опорой, и представляет собой соответствующее угловое ускорение.
Дифференциальное уравнение в пространстве состояний (1) можно использовать для определения траектории центра масс, а также реакции земли и сил пружины. Грубо говоря, полученная с помощью этой модели траектория аппроксимирует траекторию реального центра масс двуногой системы. Точно так же измерения силовой пластины [13] показывают, что сила реакции опоры реальной двуногой системы может быть точно аппроксимирована силой, рассчитанной с использованием (1).
Помимо использования этой модели для изучения различных параметров оптимизации механической энергии цикла ходьбы биологическими системами, значимость этого результата отражается в том факте, что эту модель с сосредоточенной массой можно использовать в качестве приближенной эталонной модели для сложного двуногого робота. системы управления.
Идея состоит в том, чтобы построить математическую модель на основе набора уравнений (1) для многократного вычисления силы реакции с заданными временными шагами и использования этого результата для расчета требуемых крутящих моментов для двуногой роботизированной системы со сложной архитектурой, чтобы общая сила реакции была равна к модели, полученной с помощью модели сосредоточенной массы. Блок-схема этой концепции системы управления показана на рисунке 3. Одним из основных преимуществ этой эталонной модели является возможность инверсии динамической системы без решения проблем обратной стабилизации системы [14].
А именно, основная проблема использования системы динамической инверсии для вычисления номинального управляющего входного вектора – сложность проектирования точной причинно-следственной инверсии, приводящей к разработке псевдообратной системы, которую очень часто необходимо стабилизировать. В случае обратной системы, когда модель с сосредоточенной массой используется для прогнозирования номинальных входных данных, стабилизация не требуется.
Модель включает демпфирование, представленное коэффициентом b и крутящим моментом для случая, когда центр давления у стопы не принимается за точку контакта пружины с землей.Сила контакта с землей, возникающая при ходьбе человека, может быть предсказана с помощью модели масса-пружина.
Потенциальная энергия, накопленная в пружине, и гравитационная потенциальная энергия меняются местами с кинетической энергией точечной массы. Часть механической энергии теряется во время полупериода ходьбы из-за неупругого столкновения ступни с землей [15], а остальная накопленная энергия продолжает обмениваться между кинетической и потенциальной энергией в следующем полупериоде, который описывается параметром процентного восстановления [16].
Хотя эти модели являются очень упрощенными представлениями реальной анатомии человеческого тела, они предоставляют очень удобный способ интерпретировать и анализировать большинство важных параметров цикла походки. Интегральные характеристики цикла походки человека, такие как общая кинетическая энергия, потенциальная энергия, угловой момент относительно точки контакта с землей, траектория центра масс и законы движения, а также сила земли в сагиттальной плоскости, могут быть рассмотрены с использованием упрощенная модель (например,, MSIP).
Используя модель пространства состояний (1), можно получить силу грунта (рис. 4) и использовать ее для качественного прогнозирования реальной силы реакции земли, которая возникает во время ходьбы двуногих конструкций.
Помимо силы реакции опоры, модель масса-пружина может качественно прогнозировать потенциальную, кинетическую и полную механическую энергию ходьбы. На рисунке 5 показано изменение энергии во время ходьбы, предсказанное моделью масса-пружина.
1.3. Модели с распределенной массой и несколькими степенями свободы
Сложные модели двуногой ходьбы и их практическая реализация. Двуногие роботы обычно основаны на анатомии человеческого тела [6–8]. Однако все эти модели и реализации включают меньше степеней свободы (DOF) движения, чем DOF, существующие в человеческом теле. Спинальная область тела имеет относительно большое количество свободы. Движение в области позвоночника влияет на поведение цикла ходьбы, но этим движением можно пренебречь, и большинство моделей с распределенной массой представляют область туловища как твердое тело или как два твердых тела с одним поворотным суставом в туловище.Движение системы в (приблизительной) плоскости симметрии человеческого тела называется движением в сагиттальной плоскости. Преобладающие ускорения центров тяжести частей тела происходят параллельно сагиттальной плоскости, что приводит к преобладающим инерционным силам и моментам из-за движения, параллельного этой плоскости. Если не происходит резкого изменения направления ходьбы, возникают относительно незначительные силы инерции из-за ускорений, перпендикулярных этой плоскости, в каждый момент цикла ходьбы.
Из-за преобладания сил инерции, параллельных сагиттальной плоскости, и для упрощения модели, анализ и схема управления, показанные в этой статье, ограничиваются планарным движением модели / двуногого робота.
2. Модель двуногого робота с 10 степенями свободы
Модель, показанная на рисунке 6, представляет собой двуногую структуру с 10 внутренними степенями свободы. Три дополнительных градуса – это абсолютный (внешний) градус вращения (для движения, параллельного сагиттальной плоскости), который выбирается как угол туловища по отношению к вертикальному направлению, и два поступательных градуса с выбранной точкой отсчета. быть в тазобедренном суставе. Человеческие суставы предоставляют гораздо больше свободы, чем просто вращение вокруг одной оси (поворотный сустав).В целом, голеностопные и тазобедренные суставы человека можно рассматривать как шаровые (шаровые и шарнирные) суставы. Коленный сустав можно приблизительно рассматривать как поворотный сустав (одна степень свободы).
Однако модель, показанная на рисунке 6, включает только поворотные суставы с параллельными осями, поскольку анализ ограничен движением в сагиттальной плоскости. Как описано ранее, область позвоночника, включая шею и голову, считается твердым телом, поскольку во время цикла ходьбы не происходит значительного изгиба и, следовательно, траектории суставов и общие силы не подвергаются значительному влиянию.
Внешние координаты тазобедренного сустава (и), а также дополнительный внешний (абсолютный) угол зависят (при условии отсутствия проскальзывания) от других обобщенных координат (углов) нижних конечностей в пределах цикла ходьбы. Однако в случае, когда рассматривается фаза бега, эти внешние координаты становятся независимыми от общих координат в течение временного интервала, когда нет контакта с землей, и они необходимы.
На рисунке 6 показаны два типа координат: абсолютные и относительные.Как правило, легче работать с абсолютными координатами (углами), когда мы рассматриваем математическое описание поведения модели и реакцию на входные крутящие моменты и силы. Однако очень весомый аргумент в пользу относительных координат – это сенсорный способ измерения координат. Совместные датчики (например, энкодеры, потенциометры) измеряют относительные углы, которые затем напрямую используются в режиме обратной связи для направления и управления роботом.
Особое внимание в модели уделено конструкции стопы (рис. 7) таким образом, чтобы переходная фаза между циклами ходьбы была максимально плавной.Конструкция шагающего робота с плоскостопием требует, чтобы ступня всегда была параллельна земле во время фазы стойки, что значительно отличается от фазы стойки человека при ходьбе. Хотя конструкция с плоскостопием обычно используется в шагающей робототехнике, она вызывает определенные нарушения кинематических отношений и внезапные изменения номинальных обобщенных сил, необходимых для имитации походки человека. Кроме того, стабилизация цикла ходьбы становится трудной, поскольку теоретически контакт происходит на краю стопы в течение значительной части времени цикла.Следовательно, точка нулевого момента (ZMP) затем привязывается к краю стопы, что усложняет операции управления.
2.1. Кинематический и динамический анализ модели
Прямая кинематика дает декартовы координаты любой точки конструкции для данного набора соединения и внешних переменных. Кинематические соотношения необходимы, чтобы замкнуть систему дифференциальных уравнений, описывающих динамику робота.
Прямая кинематика модели робота может быть выражена следующим образом: где () – векторы положения центра тяжести i -го сегмента и имеют вид.Обобщенные координаты в правой части (2) могут быть абсолютными углами сегмента и внешними координатами, или они могут представлять совместные углы и внешние координаты. Помимо (2), полный кинематический анализ включает первую и вторую производную по времени от (2). Поскольку расширенные уравнения в (2) и его первые две производные по времени слишком длинные, чтобы их можно было показать в этой статье, они опускаются, и мы приступаем к динамическому анализу.
Поскольку закон управления, который обсуждается в следующем разделе, основан на обратной модели и динамике ошибок, необходимо анализировать как прямые, так и обратные динамические уравнения.Вывод этих уравнений осуществляется с использованием основанного на энергии метода – уравнений Лагранжа. Обратная модель должна обеспечивать номинальные обобщенные силы (крутящие моменты в суставах), основанные на номинальных угловых траекториях суставов, которые, по определению, являются обратной динамикой.
С другой стороны, контроллер, основанный на ошибках, использует дифференциальные уравнения движения для генерации корректирующего значения / сигнала для входных крутящих моментов. Дифференциальные уравнения также необходимы для численного моделирования робота и оценки характеристик контроллера.На рисунке 8 показана частичная диаграмма свободного тела, которая включает только правую стоящую ногу.
Помимо сил / моментов реакции от остальной системы, набор внешних сил / моментов для подсистемы опорной стойки во время фазы одиночной опоры включает крутящие моменты в суставах, поскольку они выполняют работу и влияют на распределение механической энергии. Такой подход удобен для применения метода Лагранжа, который позволяет анализировать соответствующие силы / моменты без необходимости вычислять внутренние силы, такие как внутренние силы в соединениях.
Уравнения Лагранжа для модели шагающего робота имеют следующий вид: где – функция Лагранжа, обычно зависящая от времени, обобщенных координат и обобщенных скоростей, – это функция диссипации ( Рэлея), , и – r -я обобщенная сила (рассчитанная на основе работы неконсервативных сил, связанных с r координата поколения без учета сил трения). Функцию рассеяния можно использовать для моделирования потери энергии в момент столкновения ступней с землей.Обобщенные силы – это крутящие моменты, создаваемые двигателями в суставах робота.
Кинетическая энергия конструкции – это сумма кинетической энергии поступательного и вращательного движения для каждого сегмента. где – величина скорости центра тяжести i -го сегмента, – момент инерции i -го сегмента для центра тяжести C i , и – угловая скорость i -го сегмента. Скорость центров тяжести можно выразить через совместные угловые скорости, используя кинематические соотношения (2).Потенциальная энергия – это в основном гравитационная потенциальная энергия, поскольку в модель не включены пружины.
Альтернативный способ получения динамики модели – применить комбинацию законов Ньютона и Эйлера-Даламбера для сдвига и вращения соответственно. В любом случае получается следующая форма динамических уравнений где – вектор абсолютных углов (динамика стопы не учитывалась), – матрица инерции, представляет взаимную корреляцию угловых скоростей сегментов, – вектор влияния силы тяжести, – вектор управляющего момента, и представляет собой матрицу распределение управляющих моментов.
Хотя уравнения реализованы в имитационной модели для полной модели (10 степеней свободы), приведенные здесь уравнения и анализ относятся к сокращенной модели, для которой руки считаются достаточно легкими, так что их динамика не имеет значения для стабильность системы. Точно так же не учитывается динамика стопы с поворотной ногой, и масса считается сосредоточенной в лодыжке.
Функция кинетической энергии для модели где, (), – масса i -го сегмента, – комбинированная масса ступни и голени, и – длины положения центра тяжести i -го сегмента относительно соседних верхнего и нижнего суставов, соответственно, i Длина -го сегмента, это момент инерции i -го сегмента относительно оси, перпендикулярной сагиттальной плоскости.
Функция потенциальной энергии имеет вид Функция диссипации Рэлея отражает потерю энергии из-за вязкого трения в соединениях и имеет для модели следующий вид: где () – коэффициенты трения для голеностопного, коленного и тазобедренного суставов соответственно.
Окончательные уравнения в форме (5) получены с использованием энергетического метода, а матрицы / векторы, обозначенные в (5), выглядят следующим образом.
Симметричная матрица инерции имеет следующий вид:
Матрица представлена сегментами следующим образом: где , ().
Вектор силы тяжести имеет следующий вид: где, (), а g – ускорение свободного падения.
Матрица распределения крутящих моментов фактически представляет собой следующую постоянную матрицу: Наконец, вектор крутящих моментов суставов имеет компоненты, соответствующие крутящим моментам суставов в следующем порядке: правая лодыжка, правое колено, правое бедро, левое колено и левое бедро, соответственно. Опять же, не учитывается крутящий момент в голеностопном суставе маховой ноги, а также динамика стопы маховой ноги.
Уравнения вида (5) будут использоваться для вывода закона управления для каждого задействованного сочленения модели робота. Это показано в следующем разделе конструкции контроллера.
2.2. Конструкция контроллера
Конструкция контроллера основана на подходе к нелинейному управлению системой. Применяется комбинация обратного объекта с измененным графиком усиления.
2.2.1. Желаемое движение робота
На основе типичной ходьбы человека соответствующие угловые траектории для тазобедренных, коленных и голеностопных суставов могут быть записаны с помощью камер и маркеров, расположенных на сегментах человеческого тела.Таким образом получаются следующие траектории, которые используются для желаемого движения робота (рисунок 9).
На рисунке показано, что траектории не меняются в левой части интервала так сильно, как они меняются в остальной части цикла ходьбы. Подунтервал (фаза поворота) содержит относительно высокие производные, и очень важно точно определить момент схождения схождения, так как любое изменение момента схождения приведет к значительному изменению номинальных крутящих моментов и расчетной силы реакции опоры.
Из механической основы конструкции происходит изменение конфигурации, поскольку структура меняется с двойной опоры, которая представляет собой конструкцию с замкнутым контуром, на конфигурацию с одной опорой, которая представляет собой конфигурацию с открытой цепью.
Следовательно, когда происходит изменение конфигурации, запускается изменение закона управления. По сути, момент этого изменения конфигурации может быть определен на основе реакции опорной силы, которая измеряется с помощью прижимных подушек, расположенных у ног.
Первые две производные желаемых траекторий показаны на рисунках 10 и 11 соответственно. Относительно высокие производные заметны в фазе колебания цикла. Номинальные траектории, зарегистрированные на основе движения человека, обычно содержат значительный шум из-за ошибок во время измерений.
Поскольку для входа системы управления требуются номинальная угловая скорость и номинальное угловое ускорение для каждого задействованного шарнира, необходимо сгладить номинальные траектории.
Хотя амплитуда шума обычно мала по сравнению с номинальным сигналом, его производные могут доминировать над номинальными угловыми скоростями и ускорениями, что может вызвать значительные ошибки в желаемом движении (ошибки в опорном входном векторе).
Эту проблему можно решить с помощью фильтрации записанного сигнала. Частота среза должна быть настроена таким образом, чтобы самые крутые участки номинальной траектории могли проходить через фильтр без значительных изменений.В этом случае частота среза фильтра нижних частот составляла 30 рад / с для совместных траекторий и их первых производных.
Номинальные траектории используются для обратной динамики для создания номинальных крутящих моментов в соединениях, что обсуждается далее.
2.2.2. Инверсная система
На рисунке 13 показан инверсный блок установки и его роль в системе управления. Обратная система берет желаемые совместные траектории и соответствующие производные и обеспечивает номинальные крутящие моменты на основе уравнения обратной динамики, сформированного с использованием (5) Одна из существенных проблем с обратным проектированием объекта состоит в том, что производные желаемых траекторий (желаемый результат) включают точки, помещенные в будущие моменты времени, что делает систему управления непричинной.Возможное решение этой проблемы – использовать оценщик, задав полином Гурвица. Однако обратный объект может стать нестабильным при использовании этого предсказателя. В рамках данной работы метод обратного шага [14] был использован для стабилизации обратного объекта. Поскольку стабилизированные уравнения (13) обратного объекта, использующие полиномы Гурвица, длинные, они здесь не приводятся. По сути, основным результатом применяемого метода является глобальная экспоненциальная устойчивость обратной системы, что означает, что обратная система будет безусловно обеспечивать номинальные крутящие моменты, независимо от желаемых непрерывных совместных траекторий, и скорость сходимости к номинальные крутящие моменты будут экспоненциальными.
Очень важно получить экспоненциальную устойчивость обратной системы (псевдообратную), поскольку любая другая устойчивость (например, асимптотическая) вызовет дополнительную задержку и приведет к возникновению дополнительных ошибок из-за медленной сходимости в остальной части системы управления.
Помимо разработки псевдообратной системы динамики двуногого робота, было интересно исследовать возможные упрощения, которые снизили бы высокие вычислительные требования псевдообратной системы.Поэтому мы использовали модель перевернутого маятника с массой-пружиной, представленную ранее в тексте, с целью показать, что дорогостоящая в вычислительном отношении и сложная псевдообратная система, которая регулярно требует стабилизации, может быть заменена моделью масс-пружина, чтобы получить номинальные моменты затяжки соединений.
Основным требованием для использования модели масса-пружина является то, что желаемые совместные траектории должны быть отрегулированы таким образом, чтобы COM робота следовала траектории сосредоточенной массы модели масса-пружина.Это возможно сделать даже в закрытой математической форме, если центр давления считается фиксированным во время фазы одиночной опоры. Приближенное решение траектории COM может быть получено аналитически для модели масса-пружина, а затем углы голеностопного и коленного суставов могут быть рассчитаны (рисунок 12) следующим образом: где величины объяснены ранее (см. разделы 1.2 и 1.3) и снова показаны на рисунке 12.
Уравнения (14) имеют довольно краткое аналитическое решение для (в любом случае можно использовать численное решение, однако ; есть и аналитическое решение для) в следующем виде: Наконец, траектория угла бедра должна быть выбрана так, чтобы центр давления сохранялся внутри области контакта ступни с землей и чтобы центр масс робота оставался приблизительно в постоянном положении относительно тазобедренного сустава робота.
После расчета траекторий соединения, как описано, номинальные крутящие моменты могут быть получены с использованием решения для силы пружины / демпфера. Тогда общая радиальная сила равна где и получены с использованием модели масса-пружина (1), описанной ранее (см. раздел 1.2).
Наконец, крутящие моменты в голеностопных и коленных суставах могут быть рассчитаны для получения такой же результирующей радиальной силы, как полученная с помощью модели масса-пружина. где дается формулой (16), и даются формулой (15).Номинальный крутящий момент тазобедренного сустава рассчитывается для сохранения угла, как описано ранее.
2.2.3. Балансировка с использованием критерия ZMP
Обратная динамика обеспечивает номинальные крутящие моменты, которые обеспечивают приблизительную балансировку, а контроллер выдает значение корректирующего крутящего момента, чтобы гарантировать соблюдение желаемых траекторий суставов. Однако, поскольку контакт стопы с землей обеспечивает только одностороннюю нормальную силу, расчетный крутящий момент в голеностопном суставе, который обеспечит балансировку и отслеживание траекторий суставов, может оказаться невозможным компенсировать контактом с землей из-за ограниченного размера стопы и ограниченных возможностей. крутящий момент; то есть, если расчетный крутящий момент слишком высок, ступня не будет оставаться плоской на земле и начнет вращаться, что приведет к потере устойчивости робота, если следующий шаг не компенсирует ошибку до того, как совместные траектории выйдут за предписанные интервалы допуска.
Вот почему, помимо использования обратной динамики для расчета номинальных крутящих моментов, обеспечивающих приблизительную балансировку, необходимо задействовать еще один критерий для алгоритма управления, который учитывает положение центра давления на ступне. Этот критерий называется критерием точки нулевого момента. (1) Критерий точки нулевого момента [11] можно сформулировать следующим образом: критерий ZMP требует, чтобы внутри зоны контакта земли с ногой (без края) была точка, для которой общее Момент вокруг любой оси, лежащей в касательной плоскости контакта земли и ступни, должен быть равен нулю для фазы с одной опорой, рисунок 14 (а).Аналогично для фазы двойной опоры, показанной на Рисунке 14 (b), ZMP должен лежать внутри области ( A ), образованной путем ограждения двух площадок контакта опоры с землей, показанных на Рисунке 14 (c).
Требование нулевого момента учитывает только составляющую момента, лежащую в касательной плоскости контакта, перпендикулярная составляющая момента, возникающая в результате касательных сил контакта, все же может быть не нулевой (но относительно низкой, если только не происходит поворотное движение). выполняется роботом).
На рисунке 14 показано, что силы инерции собираются в главный вектор, действующий в центре масс. Уменьшение инерционной силы на центр сопровождается появлением инерционного момента. Математически условие можно выразить как Это означает, что момент реакции может иметь только перпендикулярную составляющую.
Условие может быть рассмотрено напрямую, без приведения сил инерции к центру масс, следующим образом: где ns – количество элементов конструкции, – вектор относительного положения центра масс конструктивного сегмента i -го сегмента, а – сила инерции и момент инерции i -го сегмента.
Уравнение (19) используется для вычисления относительных координат точки (точки ZMP / CP).
Если предварительно рассчитаны траектории номинального угла соединения, они должны обеспечивать расположение P внутри контактной области, не доходя до края стопы, для фазы одиночной опоры. Точно так же во время фазы одиночной опоры контроллер должен предпринять корректирующие действия, чтобы P не доходил до края ступни.
2.2.4. Динамика ошибок
Номинальные входные данные в установку (номинальные крутящие моменты), генерируемые обратной установкой (рис. 13), достаточны для приведения в действие идеальной системы (точно представленной моделью) для точного следования желаемым траекториям соединений.Однако математическое представление всегда имеет более или менее ошибки по отношению к системе, которая представлена этой моделью.
Помехи могут возникать из-за (i) начальных условий, (ii) эффектов, которые не включены в модель, поскольку их способ действия и реакция системы на них неизвестны, (iii) неизбежная задержка в датчиках (энкодеры, потенциометры) , и аналого-цифровое преобразование), (iv) намеренное упрощение математического описания модели, поскольку мы полагаемся на закон управления для минимизации ошибки (например,g., оставляя некоторый эффект трения не смоделированным) и т. д.
Архитектура модели робота в анатомическом положении имеет вертикальную плоскость симметрии (сагиттальную плоскость). Из-за этой симметрии и цикличности номинальных траекторий суставы ног и рук на одной стороне тела имеют одинаковые номинальные крутящие моменты в течение цикла ходьбы, только сдвинутые по фазе, когда движение ограничивается плоским движением. Затем схему управления двумя фазами одиночной опоры и фазой двойной опоры, завершающей цикл ходьбы, можно сузить до фазы одиночной опоры и фазы двойной опоры.
Поскольку динамика робота значительно различается во время фазы одинарной и двойной опоры, в этой статье было удобно рассмотреть две конфигурации контроллера. Краткий анализ показывает, что три степени свободы удаляются для рассмотрения на плоскости после того, как обе ноги полностью соприкасаются с землей без скольжения. Две поступательные степени свободы, которые учитываются в плоском случае, и одна степень вращения удаляются после того, как вторая ступня становится неподвижной относительно земли.Точно так же в трехмерном анализе движения удаляются шесть степеней свободы; Удаляются 3 поступательных и 3 вращательных градуса, так как вторая ступня становится неподвижной относительно земли.
Более того, для простоты этого обсуждения, влияние относительной динамики рук по отношению к туловищу будет игнорироваться и рассматриваться как возмущение, влияние которого должно быть минимизировано контроллером. Систему (математическую модель шагающего робота) можно представить следующим образом.Представление в пространстве состояний трех совместных переменных на одной ноге модели робота выглядит следующим образом: Уравнение (20) можно выразить в упрощенном виде где – вектор в пространстве состояний, связанный с тремя углами сочленения, и его производная, как показано в (20). Хотя показано, что функции распределения крутящих моментов () зависят от всего вектора состояния, именно они зависят только от четко пронумерованных компонентов вектора состояния (от углов конструкции, а не от угловых скоростей).В дальнейшем для простоты вместо (20) будем использовать (21).
Реальный вектор пространства состояний системы равен, который обычно отклоняется от номинального вектора состояния. Разница между двумя векторами обозначается как вектор ошибок.
Используя производную по времени вектора ошибки и (21), получаем следующее это Уравнение (23) используется для разработки контроллера на основе линеаризации, где матрица и тензор третьего порядка содержат производные, которые используются для запланированных коэффициентов усиления контроллера.Тензор представляет собой изменение функции матрицы распределения входных крутящих моментов из-за изменения вектора пространства состояний, и он имеет следующую форму, где каждая запись является вектором, то есть Символ обозначает тензорное произведение, так что каждый элемент вектора выполняет скалярное произведение с вектором ошибки, и, наконец, результат выполняет умножение матрицы на вектор-столбец номинальных входных крутящих моментов.
Регулятор запланированного усиления, основанный только на (23), не может справиться с ошибками установившегося состояния.По этой причине вектор пространства состояний дополняется тремя интеграторами (они интегрируют угловую ошибку для голеностопного, коленного и тазобедренного суставов, соответственно) следующим образом: Стабильность контроллера планирования усиления ограничена максимально допустимыми производными по времени от желаемых траекторий угла сочленения, которые используются в качестве переменных планирования. где – вектор искомых траекторий углов сочленения, – положительная постоянная (теорема из [14]).Вектор планирования представляет собой номинальные углы в голеностопном, коленном и тазобедренном суставах. и условие (26) в случае числовой нормы Планирование могло включать все номинальные переменные пространства состояний, а также дополнительные входные данные для планирования усиления. Однако проблема возникает, когда номинальные состояния заранее неизвестны (или известны частично). В этом случае можно использовать обратную систему для генерации номинальных состояний на основе эталонного входа / желаемого выхода.
Ограничение (26) является серьезным ограничением контроллера в результате применения концепции «замороженного времени». Однако применение обратной системы (рисунок 13) значительно улучшило возможности контроллера, поскольку обратная система включает в себя производные по времени желаемых совместных траекторий, а ограничение (26) на производные по времени переменных планирования (желаемые совместные углы) равно заменено ограничением на производные по времени вектора ошибки, то есть вектора отклонений угловых скоростей от номинальных значений.Для этой конструкции составляет около 6 рад / с.
Новшество в этой конструкции по сравнению с традиционной схемой планирования ПИД-регулятора состоит в том, что эта конструкция контроллера включает нелинейные отношения для планирования усиления на основе нелинейной динамики системы. В результате контроллер лучше отслеживает траектории с более высокими производными по времени.
Характеристики регулятора по графику усиления в сочетании с инверсным объектом обсуждаются ниже.
3. Результаты моделирования
Используя контроллер, основанный на планировании усиления, как показано на блок-схеме на Рисунке 13, можно получить следующие результаты.На рисунке 15 показаны номинальные крутящие моменты в тазобедренном, коленном и голеностопном суставах, полученные с помощью системы обратного растяжения.
Эти номинальные входные данные в управляемую систему нормализованы относительно веса тела (BW), умноженного на общую длину ноги (LL), так что результаты масштабируются по массе тела (если пропорция сегментов тела длина и масса поддерживаются постоянными). Характеристики отслеживания контроллера голеностопного сустава показаны на рисунке 16.
Характеристики отслеживания контроллера для угла коленного сустава показаны на рисунке 17.
Для тазобедренного сустава целью контроллера было регулирование угла туловища относительно вертикального направления. Характеристики контроллера по поддержанию этого угла относительно небольшим во время цикла ходьбы показаны на рисунке 19.
Наконец, сила грунта из модели робота вычисляется и показана на рисунке 18, помимо силы грунта модели с распределенной массой.
Характеристики конструкции контроллера с результатами, показанными на рисунках 16–18, обсуждаются далее.
4. Обсуждение результатов
Первоначальный ответ системы с нулевыми начальными условиями (нулевые углы, что означает анатомическое положение стоя и нулевые угловые скорости) выглядел немного хуже, чем реакция системы для второго цикла, результаты которого показаны на фигуры. Однако устойчивый отклик цикла ходьбы достигается очень быстро после (нулевых) начальных условий, и второй цикл показан на рисунках.
Ошибка отслеживания углов голеностопного и коленного суставов не является значительной, как показано на рисунках 16 и 17. Хотя производные по времени очень высоки в паре подинтервалов периода цикла, запланированному контроллеру усиления удается сохранить угол отклика. близко к желаемому пути. Высокие производные по времени всегда являются сомнительной проблемой для контроллеров с графиком усиления, поскольку контроллеры с графиком усиления основаны на концепции замороженного времени. Принимая во внимание, что производные по времени относительно высоки для этого типа управления, успешные характеристики управления могут быть оправданы в этом случае использованием обратного объекта, так что контроллер, основанный на динамике ошибок, должен корректировать лишь небольшое отклонение от номинального значения. крутящие моменты, обеспечиваемые обратным заводом.
Хотя желаемые угловые траектории (рисунок 9) показали, что существует небольшое изменение угла туловища по отношению к вертикальному направлению, контрольная цель для тазобедренного сустава была настроена так, чтобы поддерживать (регулировать) нулевой угол туловища. Результаты, показанные на рисунке, указывают на хорошие характеристики регулирования, поскольку изменение угла остается в пределах допустимого диапазона.
Наконец, сила грунта, рассчитанная на основе ускорения центров тяжести, показывает относительно хорошее согласие с экспериментально измеренными данными.Небольшие отклонения можно частично объяснить возможными отклонениями сегментов модели ходьбы от реальных человеческих сегментов, сопровождаемыми некоторыми отклонениями записанных функций угла суставов от времени от реальных траекторий углов суставов.
5. Заключение
Продвинутые методы управления двуногим роботом основаны на обратной динамике модели двуногого робота (эталонная модель). Следовательно, важно создать точную, но все же относительно простую модель, которая обеспечит точный расчет соответствующих сил и моментов, необходимых для получения определенного набора желаемых траекторий суставов.
Для этой цели можно использовать две основные группы моделей двуногой ходьбы. Первая группа состоит из относительно простых моделей, но очень полезных для анализа наземных сил, анализа кинетического, потенциального и общего баланса энергии, энергии, возвращаемой из потенциальной в кинетическую и наоборот механизмом ходьбы, и других интегральных характеристик рассматриваемого двуногого тела. как сосредоточенная масса в центре тяжести. Вторая группа моделей состоит из моделей с распределенной массой, которые позволяют более детально анализировать, например, крутящие моменты в суставах ходовой конструкции (которые нельзя измерить непосредственно в теле человека), инерционные эффекты из-за сегментарного движения относительно центра. силы тяжести, а также низкий уровень управления, используемый для управления двуногим роботом.
В качестве значительного упрощения моделей ходьбы по отношению к структуре человеческого тела, можно рассматривать всю область позвоночника как твердое тело, поскольку нет значительного изгиба и значительного вклада динамики изгиба туловища в общую динамику структуры ходьбы. . Другие упрощения могут быть связаны с типами суставов, формой стопы и т. Д.
Управление слежением за шагающим роботом может быть основано на траекториях суставов человеческого тела. Эти функции угла времени могут быть записаны для каждого сустава с помощью камер, сегментных маркеров и обработки изображений.Вход системы управления требует номинальной угловой скорости и номинального углового ускорения для каждого задействованного шарнира. Следовательно, необходимо сгладить номинальные траектории и пропустить траектории через фильтр нижних частот, поскольку любой разрыв или внезапное изменение записанных данных порождает очень высокие производные и может сделать систему управления нестабильной.
Частота среза должна быть настроена таким образом, чтобы самые крутые части номинальной траектории могли проходить через фильтр без значительных изменений.При этом частота среза фильтра нижних частот составляла 30 рад / с для совместных траекторий и их первых производных.
Система управления может быть успешно спроектирована и реализована в форме комбинации обратной модели объекта и контроллера на основе линеаризации с усилением, запланированным в соответствии с номинальным изменением вектора пространства состояний. Обратный объект в основном генерирует номинальные управляющие входные данные (крутящие моменты шарниров). Однако обратный объект становится непричинным, если необходимы точные значения производных по времени опорного входа (желаемого выхода).В качестве альтернативы производные могут быть предсказаны обратным объектом. Недостатком этого подхода является то, что система может стать нестабильной и ее необходимо стабилизировать. В данной работе использовался метод обратного шага.
Регулятор динамики запланированной ошибки усиления успешно заставил выходной сигнал системы следовать желаемым совместным траекториям. Хотя планирование усиления представляет собой концепцию замороженного времени, что означает, что производные по времени должны (их абсолютные значения) оставаться в определенном диапазоне, чтобы поддерживать рабочие характеристики контроллера и стабильность системы, результаты моделирования показали замечательные характеристики отслеживания, которые могут быть объясняется как хорошее прогнозирование номинальных крутящих моментов через обратную установку.
Сравнение результатов модели для силы грунта показывает удовлетворительно хорошее согласие между результатами модели и данными измерений.
Основная проблема традиционных методов управления для двуногого робота заключается в том, что системы с несколькими входами и выходами (MIMO), такие как двуногие роботы, управляются соединение за соединением независимо друг от друга, а перекрестная связь различных пар вход-выход моделируется как внешнее возмущение. Эти методы удобны в случаях, когда сложно разработать какую-либо разумную модель управляемой системы, но, как правило, не могут обеспечить высокие характеристики в случаях управления системами MIMO.
Системы, такие как двуногие роботы, требуют очень точного отслеживания желаемых траекторий, чтобы сбалансировать архитектуру во время ходьбы. Идея, предложенная в этой статье, заключается в том, что эти перекрестные связи можно точно смоделировать, а не рассматривать их как внешнее возмущение и значительно улучшить общие характеристики системы. В частности, в документе показана новая конструкция регулятора с планированием нелинейного усиления в сочетании с эталонной моделью концентрированной массы.
Моделирование двуногого робота как системы MIMO вместо того, чтобы рассматривать систему как ряд независимых суставов с возмущением, означает, что мы рассматриваем, как привод / крутящий момент –-го влияет на движение –-го сустава, чтобы отрегулируйте комбинацию моментов (входов) так, чтобы соединения следовали заданным траекториям соединения.
Приложения
A. Уравнения вывода движения
A.1. Уравнение движения для обобщенной координаты
Энергетический метод (метод Лагранжа) требует вычисления частных производных кинетической и потенциальной энергии, а также обобщенных производных скорости диссипативной функции R . Полная кинетическая энергия определяется следующим выражением: Все термины, которые здесь явно не объясняются, были объяснены во втором разделе основного текста.Полная потенциальная энергия системы равна Частная производная кинетической энергии по угловой скорости опорного сегмента голени равна Производная по времени частной производной по угловой скорости голени равна Частная производная кинетической энергии по равна Частная производная потенциальной энергии по:
Потери энергии, связанные с трением, включены в функцию рассеяния Рэлея.Частная производная функции по угловой скорости сегмента дает моменты вязкого трения, связанные с рассматриваемой степенью свободы (вращение сегмента голени). Моменты трения, которые напрямую связаны с движением сегмента голени, получаются через производную Обобщенная неконсервативная сила, связанная со степенью свободы вращения сегмента, представляет собой комбинацию крутящих моментов, приложенных к соединительным суставам (в голеностопном и коленном суставах). Наконец, дифференциальное уравнение движения, связанное с вращением сегмента голени, имеет вид что дает следующее: Это уравнение можно оформить следующим образом: где,,,,,,,,,,, и.
Это уравнение было показано в разделе 2.1 как часть матричного уравнения (5).
А.2. Уравнение движения для обобщенной координаты
Частная производная выражения кинетической энергии по угловой скорости опорного сегмента верхней части ноги равна со следующей производной по времени: Частная производная кинетической энергии по углу верхней опорной ноги равна Консервативная обобщенная сила, связанная с координатой, определяется следующей производной: Роль моментов трения в уравнении движения, связанном с координатой, описывается частной производной функции Рэлея по угловой скорости Соответствующая обобщенная неконсервативная сила представляет собой следующую комбинацию моментов: Ну наконец то, Уравнение (А.18) можно переставить следующим образом: где,,,,,,,,,,, и.
А.3. Уравнение движения для обобщенной координаты
Частная производная выражения кинетической энергии по угловой скорости махового сегмента голени равна со следующей производной по времени: Частная производная кинетической энергии по углу нижней поворотной ноги равна Консервативная обобщенная сила, связанная с координатой, определяется следующей производной: Роль моментов трения в уравнении движения, связанном с координатой, описывается частной производной функции Рэлея по угловой скорости Соответствующая обобщенная неконсервативная сила представляет собой следующую комбинацию моментов: Ну наконец то, Уравнение (А.26) можно переставить следующим образом: где,,,,,,,,,,, и.
А.4. Уравнение движения для обобщенной координаты
Частная производная выражения кинетической энергии по угловой скорости махового сегмента голени равна со следующей производной по времени: Частная производная кинетической энергии по углу нижней поворотной ноги равна Консервативная обобщенная сила, связанная с координатой, определяется следующей производной: Роль моментов трения в уравнении движения, связанном с координатой, описывается частной производной функции Рэлея по угловой скорости Соответствующая обобщенная неконсервативная сила представляет собой следующую комбинацию моментов: Ну наконец то, Уравнение (А.34) можно переставить следующим образом: где,,,,,,,,,,, и.
А.5. Уравнение движения для обобщенной координаты
Частная производная выражения кинетической энергии по угловой скорости махового сегмента голени равна со следующей производной по времени: Частная производная кинетической энергии по углу нижней поворотной ноги равна Консервативная обобщенная сила, связанная с координатой, определяется следующей производной: Роль моментов трения в уравнении движения, связанном с координатой, описывается частной производной функции Рэлея по угловой скорости Соответствующая обобщенная неконсервативная сила представляет собой следующую комбинацию моментов: Ну наконец то, Уравнение (А.42) можно переставить следующим образом: где,,,,,,,,,,, и.
Благодарность
Авторы хотели бы поблагодарить доктора Джима Чжу, профессора Университета Огайо, за его информацию об общем управлении нелинейными системами через пару других связанных проектов
Робототехника | Бесплатный полнотекстовый | Проблемы проектирования шагающих роботов Hexapod
2.1. Ранние разработки
Первые гексаподы могут быть идентифицированы как роботы на основе жестко заданного движения, так что адаптация к земле была невозможна.Ранние исследования 1950-х годов были сосредоточены на назначении управления движением полностью вручную человеком-оператором [11]. Один из первых успешных роботов-гексаподов был сконструирован в Римском университете в 1972 году (рис. 1а) как шагающая машина с компьютерным управлением и электрическим приводом. диски [12]. В середине 70-х годов в Российской академии наук в Москве была разработана шестиногая шагающая машина с математической моделью управления движением. Он был оснащен лазерным сканирующим дальномером и был связан с двухкомпьютерной системой управления [13].В 1976 году в МГУ был разработан шагающий робот Маша-гексапод (рис. 1б). Робот имел трубчатое осевое шасси, шарнирно-сочлененные ноги с тремя степенями свободы [14]. Гексапод умел преодолевать препятствия, используя контакт на ногах и датчик приближения. Университет штата Огайо в 1977 году разработал шестиногую роботоподобную систему, похожую на насекомых, под названием «OSU Hexapod» [15]. Этот гексапод был привязан и был вынужден преодолевать короткие расстояния через препятствия (рис. 1c). В 1983 году Университет Карнеги-Меллона разработал «шестиногий гидравлический ходунок» [16], первый гексапод, несущий человека, способный перемещаться по пересеченной местности, используя различные типы походки.В гексаподе использовалась комбинация гидравлической обратной связи, компьютерного управления и управления человеком, он был около 2,5 м в длину и такую же ширину. Он весил около 800 кг и приводился в действие бензиновым двигателем мощностью 13 кВт.Рисунок 1. Ранняя конструкция гексапода: ( a ) гексапода Римского университета; ( b ) МАША гексапода; ( c ) Гексапода ОГУ; ( d ) гексапода ODEX I; ( e ) ASV hexapod.
Рисунок 1. Ранняя конструкция гексапода: ( a ) гексапода Римского университета; ( b ) МАША гексапода; ( c ) Гексапода ОГУ; ( d ) гексапода ODEX I; ( e ) ASV hexapod.
В 1984 году компания Odetic Inc., Калифорния, США, разработала Odex I [17], шестиногого радиально-симметричного гексаподного робота, который использовал бортовой компьютер для воспроизведения заранее запрограммированных движений (рис. 1d). Его бортовым компьютером можно было управлять удаленно, и робот двигался самостоятельно. Используя дистанционное управление человеком или заранее записанные движения, гексапод мог преодолевать препятствия, такие как лестницы или пикап. Odex I весил 136 кг; каждая нога смогла поднять 180 кг. В 1985 году в России был разработан Hexapod Hexapod Rover [18].Этот гексапод был разработан для исследования шагающего движителя и системы управления. НМИИА имел массу 750 кг; его грузоподъемность 80 кг; скорость движения составляла 0,7 км / ч. В 1989 году Университет штата Огайо начал проект автомобиля с адаптивной подвеской [19]. Шестиногий робот, показанный на рисунке 1e, использовал гидравлическое управление, приводимое в действие двигателем внутреннего сгорания. Человек мог управлять им с помощью джойстика, в то время как индивидуальное управление каждой ногой обеспечивалось центральным компьютером.В качестве основных характеристик следует отметить грузоподъемность 250 кг, а также возможность преодолевать канавы шириной 1,8 м и преодолевать вертикальные ступени высотой не более 1,65 м. Шагающий робот-гексапод под названием Aquarobots был сконструирован в 1989 году и использовался для подводных измерений профилей грунта при строительстве гаваней [20]. В том же году был разработан небольшой робот-гексапод по имени Чингис (Genghis) длиной 0,35 м и весом 1 кг [21]. Поведение Genghis явно не контролировалось, но было построено путем добавления уровней управления поверх существующего более простого уровня.Этот подход отличался от более традиционного метода декомпозиции задач. Гексаподы Аттилы и Ганнибала были созданы в лаборатории Mobot в начале 1990-х годов [22]; это были очень сложные автономные роботы для своего размера, обладающие более чем 19 степенями свободы, более 60 сенсорными входами, восемью микропроцессорами и поведением в реальном времени. Шагающая машина ТУМ была разработана в 1991 году. Робот был спроектирован и управлялся аналогично палочному насекомому [23]; Система управления реализована в виде нейронной структуры.AMBLER (Автономный исследовательский робот MoBiLe) был роботом-гексаподом, разработанным Лабораторией реактивного движения в середине 90-х годов для работы в особых условиях планетарного ландшафта [24]. Робот был около 5 м в высоту, до 7 м в ширину и весил 2500 кг. В то время как большинство роботов сгибают ноги, чтобы шагать и ходить, ноги Амблера остаются вертикальными, в то время как они качаются горизонтально, используя телескоп, как смещение, чтобы коснуться земли.2.2. Последние разработки
Два последних десятилетия характеризовались быстрым развитием технологий систем управления.Роботы Hexapod были оснащены различными сенсорными системами. Системы искусственного интеллекта широко применялись для анализа окружающей среды и движения роботов по сложной поверхности.
В конце 90-х годов в Университете Кейс Вестерн Резерв (США) была разработана серия био-вдохновленных роботов, таких как, например, Робот III, у которого всего 24 степени свободы. Архитектура Robot III была основана на строении тараканов, пытаясь имитировать их поведение [25]. В частности, каждая задняя нога имела три степени свободы, каждая средняя нога – четыре степени свободы, а каждая передняя нога – пять степеней свободы.Точно так же Биобот был биомиметическим роботом, физически смоделированным как американский таракан (Periplaneta Americana) и работающим от сжатого воздуха [26]. Этот гексапод обладал огромной скоростью и маневренностью. Каждая нога робота состояла из трех сегментов, соответствующих трем основным сегментам ног насекомых: тазобедренной, бедренной и большеберцовой. Гамлет был роботом-гексаподом, сконструированным в Университете Кентербери, Новая Зеландия [27]. Все его ноги были идентичны, и у каждой было по три шарнирных сустава. Задача приложения Гамлета заключалась в изучении силового и позиционного управления на пересеченной местности.В 2001 году начался проект под названием RHex [28]; Дизайн RHex является результатом междисциплинарных и нескольких университетов, финансируемых DARPA, которые применяют математические методы от теории динамических систем к проблемам передвижения животных. Конструкция шестиугольника состоит из жесткого корпуса с шестью податливыми ножками, каждая из которых имеет одну глубину резкости (рис. 2а). Таким образом, у RHex всего шесть моторов, которые вращают ноги, например колесо.Рисунок 2. Последние разработки в области проектирования гексаподов: ( a ) базовая архитектура RHex; ( b ) Шестиногий шагающий робот LAURON V из Исследовательского центра информационных технологий FZI в Карлсруэ, Германия; ( c ) Одна конфигурация прототипа LEMUR: передние конечности функционируют как ноги и руки со встроенными инструментами; ( d ) СПОРТСМЕН во время экспериментальных испытаний.
Рисунок 2. Последние разработки в области проектирования гексаподов: ( a ) базовая архитектура RHex; ( b ) Шестиногий шагающий робот LAURON V из Исследовательского центра информационных технологий FZI в Карлсруэ, Германия; ( c ) Одна конфигурация прототипа LEMUR: передние конечности функционируют как ноги и руки со встроенными инструментами; ( d ) СПОРТСМЕН во время экспериментальных испытаний.
Было разработано несколько прототипов Rhex. В настоящее время проект все еще активен.Гексаподный робот
Lauron V (рис. 2b) стал результатом примерно 10 лет постепенного улучшения предыдущих конфигураций Lauron I, II, III и IV. LAURON [29] был биологически вдохновлен палочником. Как и у этого насекомого, у робота есть шесть ног, прикрепленных к центральному телу. Каждая из шести ног приводится в действие четырьмя суставами. Каждая ступня имеет трехосевой датчик силы, а каждый двигатель имеет датчик тока, который определяет силы, противодействующие его движению. В настоящее время проект все еще активен. Грегор I воспроизводит ловкость таракана, где управление движением основано на теории Центрального генератора паттернов [30].Грегор: Меня вдохновило биологическое вдохновение: каждая пара ног имеет уникальный дизайн. Пара передних ног и пара средних ног имеют по три степени свободы на каждой ноге, а пара задних ног имеет две степени свободы. Другой робот-гексапод под названием Sprawlita [31] был разработан в соответствии с основными принципами передвижения тараканов: самостабилизирующаяся поза, различные функции для ног, пассивная вязкоупругая структура, управление с разомкнутым контуром и интегрированная конструкция. В 2005 году был разработан робот-гексапод по имени BILL-Ant-p [32].Робот был основан на поведении муравьев и состоит из трех степеней свободы на каждой ноге с шестью чувствительными к силе ногами, шеей и головой с тремя степенями свободы, а также задействованными нижними челюстями с чувствительностью к силе, что в общей сложности составляет 28 степеней свободы. Гексапод, названный LEMUR (робот-робот с механическим движением на конечностях), был разработан Лабораторией реактивного движения [33] с целью использования роботов для ремонта и обслуживания в условиях почти нулевой гравитации на поверхности космического корабля (рис. 2c). MARS (Роботизированная система с несколькими отростками) – это мобильная исследовательская платформа с гексаподом, разработанная после проекта LEMUR для аналогичных приложений с использованием радиальной симметрии.Платформы MARS были способны ходить в любом направлении, не поворачиваясь [34]. В 2004 г. в Лаборатории реактивного движения был разработан шестиногий лунный робот под названием ATHLETE [35]. Этот робот обладал способностью быстро катиться на вращающихся колесах по ровной гладкой местности и осторожно ходить на неподвижных колесах по неровной и крутой местности. ATHLETE имел грузоподъемность 450 кг, диаметр около 4 м и радиус действия около 6 м (рис. 2d). AQUA был роботом-амфибией-гексаподом, разработанным с шестью независимо управляемыми приводами ног [36].Одной из наиболее важных особенностей этого робота была способность переключаться с ходьбы на плавание при переходе от песчаного пляжа или зоны для серфинга к глубокой воде. Подводный шагающий робот CR200 был построен на основе концепции Крабстера [37]. Областью применения было обследование затонувших судов или размыв и обследование морского дна в сильноточных и мутных средах. Робот-гексапод под названием RiSE может лазить по множеству вертикальных поверхностей, а также демонстрировать горизонтальную подвижность [38].Механизм, применяемый в RiSE, использует податливые микрошипы на ногах для надежного прикрепления к текстурированным вертикальным поверхностям, чтобы нести полезную нагрузку во время подъема робота. Гексаподы COMET – это серьезная группа роботов, предназначенных для работы на чрезвычайно неструктурированной местности [39]. Последний прототип, COMET IV, представляет собой гексапод с гидравлическим приводом, включающий ходьбу с контролем силы / импеданса, полностью автономную навигацию с лазерным картированием и дистанционное управление. Mantis – это робот-гексапод с гидравлическим приводом, разработанный Micromagic Systems.Его высота составляет почти 3 метра, а вес – около 2 тонн; в настоящее время это один из самых больших роботов-гексаподов в мире [40]. Многие гексаподы-вездеходы для исследования космоса были спроектированы и построены за последние годы. Очень богатую справочную информацию об этом транспортном средстве и проблемах их конструкции можно найти в [41]. С учетом большого разнообразия существующих роботов-гексаподов, некоторые из описанных выше прототипов подробно описаны в специальной таблице (Таблица 1). Он предоставляет инструмент для быстрого сравнения основных функций.Таблица 1. Сравнение роботов-гексаподов.
| Основные характеристики | Основные характеристики | ||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Имя робота | Масса (кг) | Длина (см) | Ширина (см) | Высота (см) | Макс. (м / с) | Походка / подвижность | Мощность (Вт) | Год | Задачи приложения | ||||||||||||
| Ambler | 2700 | 500 | 500 | 700 12.007 | Без волн | 1900 | 1989 | Планетарные исследования | |||||||||||||
| ASV | 3200 | 520 | 240 | 300 | 15 | 911 911 911 | Навигация по неровной местности|||||||||||||||
| Ганнибал | 2,7 | 35 | NA | 20 | 19 | 0,04 | Wave Free | NA | 1989 | 38 | 38 Planetary | 80 | 40 | 100 | 18 | 0.3 | Wave | 500 | 1991 | Hexapod по биологическим принципам | |
| Biobot | 11 | 58 | 14 | 23 | 18 | NA | Передвижение по пересеченной местности|||||||||||||||
| Hamlet | 13 | 40 | 28 | 40 | 18 | 0,1 | Wave Free | 52 | 2001 | Контроль положения и положения | 7 | 53 | 20 | 15 | 6 | 0.55 | Wave Free | 100 | 2001 | Hexapod с уменьшенными исполнительными механизмами | |
| Sprawlita | 0,27 | 16 | NA | NA | 12 | Роботы, вдохновленные тараканами | |||||||||||||||
| Lauron III | 18 | 50 | 30 | 80 | 18 | 0.4 | Wave Free | NA | 1999–2003 | Контроллер тестирования||||||||||||
| Чингиз | 1 | 40 | 15 | NA | 12 | 0.04 0.12 | Wave Free | NA | 2004 | Разработка реактивного регулятора | |||||||||||
| Aqua II | 16,5 | 64 | 44 | 13 | 6 911 911 | 1 0,7 200 | 2010 | Подводный робот-гексапод | |||||||||||||
| Bill-Ant-p | 2,3 | 47 | 33 | 16 | 22 | 0,004 | Волна | Нога с биологической окраской робот | |||||||||||||
| Грегор I | 1.2 | 30 | 9 | 4 | 16 | 0,03 | NA | 25 | 2006 | Робот, вдохновленный тараканами. | |||||||||||
| Athelete | 850 | 2,75 | 2,75 | 2 | 36 | 2,78 0,016 | Колесный Волна | NA | 911 911 Шершавое движение по Луне RiSe | 2,8 | 41 | NA | NA | 12 | NA | Wave | NA | 2006 | Hexapod альпинистские роботы | 0 Comet IV 250 | 24 | 0.278 | Wave | 20600 | 2009–2011 | Hexapod для многозадачных задач на открытом воздухе |
| CR200 | 600 | 250 | 200 | 130 | 911 | 911 | 2013 | Прогулка по суше или под водой в зоне турбулентного прибоя | |||||||||||||
| Mantis | 1900 | 420 | 220 | 280 | 18 | NA | Wave000 | 42 | |||||||||||||
2.3. Показатели производительности роботов Hexapod
В литературе были предложены следующие показатели для сравнения роботов с ногами, которые имеют разную массу, форму и размеры:Коэффициент заполнения
Число Фруда
Удельное сопротивление
Запас устойчивости
- Коэффициент заполнения β [42] определяется как:
(1)
Коэффициент заполнения можно использовать для различения прогулок и пробежек, так как у нас β ≥ 0. ВНИМАНИЕ !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!5 для ходьбы и β <0,5 для бега.
Согласно [43], число Фруда можно вычислить по формуле:(2)
где V – скорость ходьбы или бега, g – ускорение свободного падения, h – высота тазобедренного сустава от земли. V – характерная скорость движения. Согласно [44], возможный способ оценки V может заключаться в использовании произведений (h, умноженных на f) вместо характеристической скорости V, поскольку h – это характерная высота ноги, а f – частота шага.Таким образом, для роботов-гексаподов можно написать:(3)
Александр [43] использовал число Фруда для характеристики передвижения животных; он показал, что животные разных размеров используют одинаковую походку, когда путешествуют с одинаковыми числами Фруда. В частности, большинство животных меняют походку с ходьбы на бег со скоростью, эквивалентной числу Фруда F = 1. Удельное сопротивление – это безразмерное число, которое используется для оценки энергоэффективности мобильного робота. Габриэлли и фон Карман обсудили характеристики различных транспортных средств, используя потребление энергии на единицу расстояния [45].Это:(4)
где E – общее потребление энергии на расстояние d, M – общая масса транспортного средства, а g – ускорение свободного падения. Можно сказать, что удельное сопротивление указывает на плавность передвижения. Для динамического шагающего робота мы можем определить запас устойчивости как минимальное расстояние от ZMP до границ опорного многоугольника, поскольку ZMP является естественным продолжением спроецировал CoM на землю [46]. Для робота с ногами на пересеченной местности Мессури и Кляйн определили запас устойчивости по энергии как минимальную потенциальную энергию, необходимую для падения робота [47].Что такое робототехника? Что такое роботы? Типы и использование роботов.
Робототехника быстро проникает во все сферы нашей жизни, в том числе дома.Использование роботов
Роботы имеют широкий спектр вариантов использования, что делает их идеальной технологией для будущего. Скоро мы увидим роботов почти повсюду. Мы увидим их в наших больницах, отелях и даже на дорогах.
Применение робототехники
- Помощь в борьбе с лесными пожарами
- Работа вместе с людьми на производственных предприятиях (известные как второстепенные боты)
- Роботы, обеспечивающие общение с пожилыми людьми
- Помощники хирурга
- Доставка посылок последней мили и заказа еды
- Автономные бытовые роботы, которые выполняют такие задачи, как уборка пылесосом и стрижка травы
- Помощь в поиске предметов и их переноске по складам
- Используются во время поисково-спасательных операций после стихийных бедствий
- Детекторы наземных мин в зонах боевых действий
Обрабатывающая промышленность, вероятно, является старейшим и наиболее известным пользователем роботов.Эти роботы и коботы (боты, которые работают вместе с людьми) работают для эффективного тестирования и сборки таких продуктов, как автомобили и промышленное оборудование. По оценкам, сейчас используется более трех миллионов промышленных роботов.
Логистика
Роботы для транспортировки, обработки и контроля качества становятся незаменимыми для большинства предприятий розничной торговли и логистических компаний. Поскольку теперь мы ожидаем, что наши посылки будут доставлены с молниеносной скоростью, логистические компании используют роботов на складах и даже в дороге, чтобы максимально эффективно использовать время.Прямо сейчас роботы снимают ваши товары с полок, транспортируют их по складу и упаковывают. Кроме того, рост числа роботов последней мили (роботов, которые автономно доставляют вашу посылку к вашей двери) гарантирует, что в ближайшем будущем вы столкнетесь лицом к лицу с логистическим ботом.
Это больше не научная фантастика. Роботов можно увидеть повсюду в наших домах, они помогают по хозяйству, напоминают нам о расписании и даже развлекают наших детей.Самый известный пример домашних роботов – автономный пылесос Roomba. Кроме того, теперь роботы эволюционировали, чтобы делать все, от автономного стрижки травы до очистки бассейнов.
Путешествия
Есть ли что-нибудь более фантастическое, чем автономные транспортные средства? Эти беспилотные автомобили больше не просто воображение. Сочетание науки о данных и робототехники, беспилотные автомобили захватывают мир штурмом. Автопроизводители, такие как Tesla, Ford, Waymo, Volkswagen и BMW, работают над новой волной путешествий, которая позволит нам расслабиться, расслабиться и наслаждаться поездкой.Компании, занимающиеся райдшерингом, Uber и Lyft также разрабатывают автономные райдшеринговые автомобили, для управления которыми не требуется людей.
Здравоохранение
Роботы добились огромных успехов в сфере здравоохранения.