Как сделать простого робота «стенолаза» своими руками!

Доброго времени суток любители роботов и прочих самодвижущихся самоделок! Сегодня решил собрать довольно интересную самоделку, а именно робота передвигающегося по металлическим стенам. В принципе результатом своей работы я почти доволен, но если бы у меня был аккумулятор по меньше и по мощнее, то результат был бы просто отличным, но пришлось использовать то что было, думаю в скором времени я всё же приобрету небольшой аккумулятор для своих нужд.
И так для данного робота нам понадобится:
-мотор редуктор
-картон
-бумага
-источник питания на 3,7-9 вольт (в начале я использовал крону, но из-за нехватки мощности пришлось заменить на аккумулятор типа18650)
-трубочки от ручки
-неодимовые магнитики
-провода
-выключатель
-баночка от киндера
Из инструментов нам также понадобится:
-паяльник
-ножницы

И так первым делом нужно вырезать из картона восемь равных по размеру кусочки, 4 см в длину и 1,5 см в ширину:

Затем от трубочки от ручки отрезаем два одинаковых кусочка примерно по 1,5 см в длину:

Приклеиваем наши прошлые заготовки к каждому кусочку трубочки по 4 штуки, так как показано на фото:

Теперь из того же картона вырезаем 8 кусочков по 35 мм в длину и 15 мм в ширину:

Приклеиваем их вот таким вот образом:


Затем надеваем их на ось редуктора, так чтобы они были параллельно друг к другу:


Берём наш источник питания и подсоединяем его к редуктору через выключатель:

Приклеиваем источник питание поверх редуктора, так чтобы наши “колёса” не задевали его:

Вырезаем из картона ещё один кусочек примерно 5-7 см в длину:

Приклеиваем его к нижней части редуктора, так чтобы выступало примерно 4 см:

Берём баночку от киндера и отрезаем от неё крышку, затем делаем два небольших надрезов и загибаем так как показано на фото, это нужно для того чтобы крышка лучше приклеилась к картонке

Приклеиваем вот таким вот образом:


Нарезаем из бумаги 8 примерно равных кусочка по 4-5 см (на фото они меньше так как я сделал ошибку и в первой модели данного робота сделал отрезки по 2 см и потом просто приклеил магниты к ним, но из-за того что магниты были открытые, они просто примагничивались к поверхности, а затем отрывались, так что я придумал делать некое подобие “конвертиков” из бумаги в которые клались магнитики, затем наши “конвертики” нужно приклеить к каждому выступу “колёс” так как показано на нижних фото)
Проведя несколько испытаний стало понятно что кроны не хватает и нужно что то по мощнее, поэтому я поменял крону на аккумулятор 18650, но его главный минус это то что он слишком тяжёлый, поэтому в идеале использовать небольшие аккумуляторы, на подобе тех что стоят в квадрокоптерах и радиоуправляемых самолётах

Ну вот и всё, наш робот “стенолаз” готов и осталось только его протестировать! Данный робот из-за тяжести аккумулятора двигается по стене очень медленно, но двигается! К тому же он довольно шустро передвигается по земле, думаю такая игрушка понравится детям.
Надеюсь данная статья была кому то полезна.
 Доставка новых самоделок на почту
Доставка новых самоделок на почтуПолучайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.Как сделать робота в домашних условиях для ребенка? :: SYL.ru
На полках современных магазинов для детей можно найти большое количество разнообразных игрушек. И каждый ребенок просит родителей купить ему ту или иную игрушечную “обновку”. А если в планирование семейного бюджета не входит это? В целях экономии можно попробовать сделать новую игрушку самостоятельно. К примеру, как сделать робота в домашних условиях, возможно ли это? Да вполне возможно, достаточно подготовить необходимые материалы.
Можно ли собрать робота самостоятельно?
Сейчас сложно кого-то удивить игрушкой-роботом. Современная технологическая и компьютерная индустрия шагнула далеко вперед. Но все же вас может удивить информация о том, как сделать простого робота в домашних условиях.
Бесспорно, сложно понять принцип работы различных микросхем, электроники, программ и конструкций. Сложно обойтись в данном случае без базовых знаний в области физики, программирования и электроники. Даже несмотря на это, каждому человеку по силам собрать робота самостоятельно.

Роботом называется автоматизированная машина, которая способна выполнять различные действия. В случае с самодельным роботом достаточно и того, что машина просто передвигается.
Облегчить сборку помогут подручные средства: телефонная трубка, пластиковая бутылка или тарелка, зубная щетка, старый фотоаппарат или компьютерная мышь.
Вибрирующий жучок
Как сделать маленького робота? В домашних условиях можно изготовить наипростейший вариант вибрирующего жучка. Необходимо запастись следующими материалами:
- мотором от старой детской машинки;
- литиевой батарейкой серии CR-2032, похожей на таблетку;
- держателем для этой самой таблетки;
- скрепками;
- изолентой;
- паяльником;
- светодиодом.
Сначала необходимо обмотать светодиод изолентой, оставив при этом свободные кончики. Паяльником спаиваем один светодиодный конец с задней стенкой держателя для батарейки. Оставшийся кончик спаиваем с контактом моторчика от машинки. Скрепки будут служить лапками для вибрирующего жучка. Проводки от держателя для батарейки соединяются с проводами моторчика. Жучок будет вибрировать и двигаться после контакта держателя с самой батарейкой.
Щеткабот – детская забава
Итак, как сделать мини-робота в домашних условиях? Забавную машину можно собрать из подручных материалов, таких как зубная щетка (головка), двусторонний скотч и вибромоторчик от старого мобильника. Достаточно приклеить моторчик к головке щетки, и все – робот готов.

Электропитание появится благодаря плоской батарейке. Для дистанционного управления придется что-нибудь придумать.
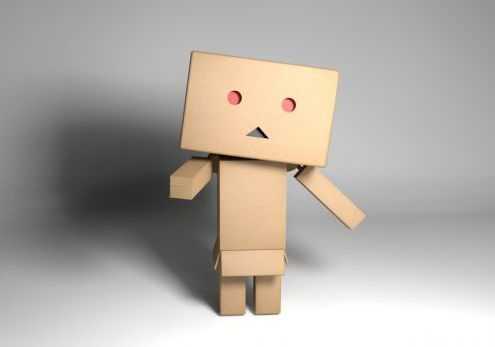
Картонный робот
Как сделать робота в домашних условиях, если его требует ребенок? Можно придумать интересную игрушку из простого картона.
Необходимо запастись:
- двумя картонными коробками;
- 20 крышками от пластиковых бутылок;
- проволокой;
- скотчем.
Бывает, что папа хочет смастерить этакую диковину для малыша, но в голову не приходит ничего толкового. Поэтому можно подумать, как сделать настоящего робота в домашних условиях.
Для начала необходимо использовать коробку в качестве туловища для робота и вырезать у нее дно. Затем нужно сделать 5 отверстий: под голову, для рук и ног. В коробке, предназначенной для головы, нужно сделать одно отверстие, которое поможет соединить ее с туловищем. Для скрепления частей робота используется проволока.
После присоединения головы нужно подумать, как сделать руку робота в домашних условиях. Для этого в боковые отверстия просовывается проволока, на которую надеваются пластиковые крышки. Получаем подвижные руки. Так же поступаем и с ногами. Сделать отверстия в крышках можно шилом.
Рекомендации по сборке картонного робота
Для устойчивости картонного робота необходимо пристальное внимание уделить срезам. Именно они придают игрушке хороший внешний вид. Сложно соединить все части при неправильной линии среза.

Если вы решили склеить между собой коробки, то не переусердствуйте с количеством клея. Лучше пользоваться прочным картоном или бумагой.
Простейший робот
Как сделать легкого робота в домашних условиях? Сложно создать полноценную автоматизированную машину, а вот минимальную конструкцию собрать все-таки можно. Рассмотрим простейший механизм, который, к примеру, сможет совершать определенные действия в одной зоне. Понадобятся следующие материалы:
Пластиковая тарелка.
Пара щеток среднего размера для чистки обуви.
Компьютерные вентиляторы в количестве двух штук.
Разъем для батарейки 9-в и сама батарея.
Хомут и стяжка с функцией защелкивания.
Гайки.
Просверливаем в тарелке для щеток два отверстия с одинаковым расстоянием. Крепим их. Щетки должны располагаться на одинаковом расстоянии от друг друга и середины тарелки. С помощью гаек прикрепляем к щеткам регулировочное крепление. В среднее расположение устанавливаем ползунки от креплений. Для движений робота необходимо использовать компьютерные вентиляторы. Они подключаются к батарейке и параллельно размещаются, чтобы обеспечить вращение машины. Это будет некий вибрационный моторчик. В завершение необходимо накинуть клеммы.
В данном случае не потребуется больших финансовых затрат или какого-либо технического или компьютерного опыта, ведь здесь подробно описано, как сделать робота в домашних условиях. Достать необходимые детали нетрудно. Для улучшения двигательных функций конструкции можно использовать микроконтроллеры или дополнительные моторчики.
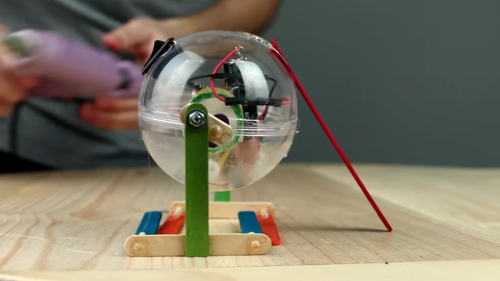
Робот, как в рекламе
Наверно, многим знаком рекламный ролик браузера, в котором главным героем является небольшой робот, крутящийся и рисующий фломастерами фигуры на бумаге. Как сделать робота в домашних условиях из этой рекламы? Да очень просто. Для создания такой автоматизированной милой игрушки необходимо запастись:
- тремя фломастерами;
- плотным картоном или пластиком;
- моторчиком;
- круглой батарейкой;
- фольгой или изолентой;
- клеем.
Итак, создаем форму для робота из пластика или картона (точнее, вырезаем). Необходимо сделать треугольную форму с закругленными углами. В каждом уголке проделываем небольшое отверстие, в которое сможет пролезть фломастер. Одно отверстие делаем вблизи центра треугольника для моторчика. Получаем 4 отверстия по всему периметру треугольной формы.
Затем вставляем по очереди фломастеры в проделанные отверстия. К моторчику необходимо прикрепить батарейку. Сделать это можно с помощью клея и фольги или изоленты. Для того чтобы моторчик крепко держался на роботе, необходимо зафиксировать его небольшим количеством клея.
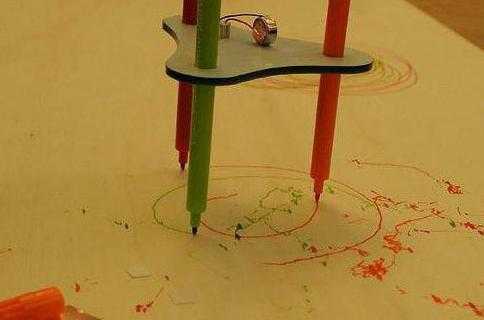
Робот будет двигаться лишь после присоединения второго проводка к закрепленной батарейке.
Робот из “Лего”
“Лего” – серия игрушек для детей, которая состоит в основном из деталей конструктора, соединяющихся в один элемент. Детали можно комбинировать, при этом создавая все новые и новые предметы для игр.
Собирать подобный конструктор любят практически все дети от 3 до 10 лет. В особенности детский интерес увеличивается, если из деталей можно собрать робота. Итак, чтобы собрать двигающиегося робота из “Лего”, необходимо приготовить детали, а также миниатюрный мотор и блок управления.
К тому же сейчас продаются готовые наборы с деталями, позволяющие собрать самостоятельно любого робота. Главное – освоить приложенную инструкцию. К примеру:
- готовим детали, как указано в инструкции;
- прикручиваем колеса, если они есть;
- собираем крепления, которые будут служить поддержкой для моторчика;
- вставляем в специальный блок батарейку или даже несколько;
- устанавливаем двигатель;
- подключаем его к мотору;
- загружаем в память конструкции специальную программу, которая позволяет управлять игрушкой.
Казалось бы, робота собрать довольно сложно, а уж человеку без определенных знаний это вообще не удастся. Но это не так. Конечно трудно соорудить полноценную автоматизированную машину, но простейший вариант сделать может каждый. Достаточно прочитать нашу статью о том, как сделать робота в домашних условиях.
www.syl.ru
Как собрать мини робота в домашних условиях
Шагающий робот шар в домашних условиях
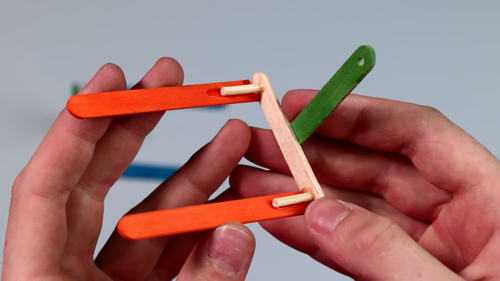
Ведущий канала “Учебник Мастерства” показал наглядно, как сделать шагающего мини робота. В первую очередь сделаем лапы. Две палочки от мороженого скрепляет вместе, отмеряем 6 сантиметров и сразу ставим две метки, где будут отверстия. Скальпелем удаляем всё лишнее, а место среза обрабатываем наждачкой. Бормашинкой по меткам сверлим два отверстия.
Берем еще две палочки, закрепляем скотчем, отмеряем 6 сантиметров и отрезаем ножовкой.Край закруглить не надо. На эту заготовку делаем отверстие только с одной стороны. Эти заготовки будем клеить прямо посередине полки с закругленными краями. Обратите внимание, они должны быть перпендикулярными. Заранее готовим четыре кусочка деревянные шпажки по 3 сантиметра. Вставляем в нижнее отверстие. При помощи суперклея к шпажке приклеиваем две заготовки по 8 см. Используйте линейку, чтобы соблюдать угол 90 градусов. Посмотрите, что должно получиться. Точно таким же образом делаем вторую лапу. Как видите, все понятно и в домашней обстановке несложно все это делать.
Нам еще понадобится пластиковый шарик из под игрушки. В нижней части шара с помощью ножовки делаем два углубления для деревянной шпажки. Закручиваем верхнюю участие маркером отмечаем где будет начала разреза. По резьбе раскручиваем и ещё раз отмечаем. Аккуратно между метками ножовкой делаем надрезы. Выбираем всё. Когда будем откручивать или закручивать шарик, отверстие всегда будет открытым.
Берем малооборотистый моторчик редуктор. Присоединяем к нему готовый контакт. Можно обойтись обыкновенными проводками. От чупа-чупса отрезаем кусочек ножки. Один конец хорошо нагреваем и сплющиваем. Второй конец тоже греем и одеваем на вал редуктора. В нижней части пластикового шарика отмеряем и клеем кусок палочки из под мороженого. Это будет подставка под мотор редуктор. Даем суперклея чуть-чуть затвердеть и сверху обильно наносим горячий клей. Ставим мотор и корпуса заливаем горячим клеем. Он не должен попадать на редуктор. Оставляем шар с мотором в стороне. Делаем 2 сантиметровые заготовки с отверстием посередине. Чтобы не было заусенцев, край обрабатываем наждачной бумагой. Берем линейку и делаем две отметки на расстоянии 1 см. По меткам сверлим два отверстия, скальпелем срезаем полукругом. Края обрабатываем.
Простейший робот в домашних условиях
Для изготовления простейшего нам понадобится моторчик, два куска провода, прищепка, зарядное устройство от телефона. Сначала нужно присоединить проволоку к двигателю. После этого, как клей затвердел, возьмём плоскогубцы согнем ножки. Теперь можно раздвинуть их, чтобы робот стоял более уверенно. Теперь припаяем контакты на зарядное устройство к плюсу и минусу.
Далее видео канала “Без Чувств”, где показано, как создать эту игрушку робота.
Теперь можно тестировать этого простейшего мини робота. Чтобы он зашевелился, нацепим прищепку на ротор. Вот и всё! Робот бегает.
Мини робот из набора в домашних условиях
На канале Alphadroid рассказали, как сделать в домашних обстоятельствах мини робота.
Для сборки ходячего необходимо большое количество компонентов. Была использована платформа для самостоятельной сборки «Дройдик». Помимо деталей, которые можно приобрести на радио-рынке, в наборе есть дополнительные необходимые элементы.
Смотрите видео канала Alpha Mods.
Комплектация набора: панели с деталями для сборки корпуса, батарейный отсек, 4 полноценных набора сервоприводов, 30 гаек, винты и гайки М 3, 2 самореза, ультразвуковой датчик расстояния, шлейф, намагниченная отвертка, инструкция по сборке.
Корпус робота деревянный, из МДФ. В комплекте 5 пластин с деталями для корпуса, обработанные лазерным гравером. Робот оснащен ультразвуковым датчиком, это поможет ему ориентироваться в пространстве. На первых страницах инструкции нарисованы панели корпуса в масштабе 1:1. Необходимо взять реальные пластины и пронумеровать так, как это сделано на рисунке.
Первым делом необходимо взять деталь D1 и D4, а также пару винтов М3*10. Аккуратно вынимаем детали из пластины и прикручиваем друг к другу. Берем D5 и сервоприводы. Прикручиваем к D5 с помощью саморезов, которые идут в комплекте. Берем первую и вторую заготовки, соединяем с помощью D3. В деревянных деталях есть пазы, и они друг в друга вставляются. Берем гайки и располагаем в отведенные для них места. Это были ноги и ступни робота. Переходим к D2 и рукава для сервоприводов. Рукав фиксируем на планке. Планка надевается.
Проводим калибровку: проворачиваем привод в сторону, вытаскиваем планку, вставляем заново и проворачиваем снова, пока планка не упрется. Еще раз снимаем планки и надеваем в конечное положение: так чтобы D2 касалось D3, либо была максимально близка к ней. Возвращаем привода на исходное положение. На этапе калибровка завершена. Берем опору D10 и устанавливаем ее на D1 и D2. D1 зажимается с помощью контргайки не до упора. То, что сейчас установили является гнездом для сервоприводов, оставшиеся два помещаем на соответствующие гнезда. Есть планка фиксации – D11.
Калибровка: одеваем плечики и проворачиваем до упора, плечи снимаем и устанавливаем в вертикальном положении, задаем угол в 90 градусов, наконец снимаем. Ноги готовы. Для сборки головы: D7, D14 и 4 болта м3*12 мм.
izobreteniya.net
Как сделать робота
Одним из очень трудоёмких и увлекательных занятий является постройка собственного робота.
Каждый, от подростка до взрослого, мечтает сделать или маленького и симпатичного, или большого и многофункционального робота, сколько людей столько различных модификаций робототехники. А вы хотите сделать робота?
Перед таким серьёзным проектом следует прежде убедиться в своих возможностях. Построение робота занятие не из дешевых и не самых простых. Подумайте, какого робота вы хотите сделать, какие функции он должен выполнять, возможно, это будет просто декоративный робот из старых деталей или это будет полнофункциональный робот со сложными, двигающимися механизмами.
Я встречал много народных умельцев, создающих декоративных роботов из старых, отработавших свой век механизмов, таких как часы, будильники, телевизоры, утюги, велосипеды, компьютеры и даже автомобили. Эти роботы делаются просто для красоты, они, как правило, оставляют очень яркие впечатления, особенно они, нравятся детям. Подросткам вообще интересны роботы как нечто загадочное, ещё неизведанное.

Детали декоративных роботов крепятся различными способами: на клею, сваркой, на винтах. В таком занятии лишних деталей не бывает в ход идут любые детали, от маленькой пружинки до самого большого болта. Роботы могут быть маленькими, настольными, а некоторые умельцы умудряются сделать декоративных роботов в человеческий рост.

Намного сложнее и не менее интересно сделать действующего робота. Не обязательно робот должен быть похож на человека, это может быть консервная банка с рожками и гусеницами 🙂 тут можно проявлять фантазию до бесконечности.

Раньше роботы были в основном механические, все движения контролировались сложными механизмами. Сегодня большинство грубых механических узлов можно заменить на электрические схемы, а «мозгом» робота может быть всего одна микросхема, в которую через компьютер вводят нужные данные.
Сегодня компания «Лего» выпускает специальные наборы для конструирования роботов, пока такие конструкторы стоят дорого и доступны не всем.

Лично мне интересно сделать робота своими руками из подручных материалов. Самая большая проблема, возникающая при строительстве, это нехватка знаний в области электрики. Если по механике можно ещё что-то сделать без проблем, то с электрическими схемами дела обстоят сложнее, часто требуется совместить несколько разных электрических узлов, тут и начинаются сложности, но всё это поправимо. При создании робота могут возникнуть проблемы с электродвигателями, хорошие моторчики стоят дорого, приходится разбирать старые игрушки, это не очень удобно. Так же стали дефицитными многие радиодетали, всё больше техники делается на сложных микросхемах, а тут нужны серьёзные знания. Несмотря на все трудности многие из нас продолжают создавать удивительных роботов для самых разных целей. Роботы могут стирать, убирать пыль, чертить, двигать предметы, веселить нас или просто украшать рабочий стол.
На сайте я периодически буду публиковать фотографии своих новых роботов, если вас тоже интересует эта тема, то обязательно присылайте свои истории с фотографиями или напишите о своих изобретениях на форуме.
modelmen.ru
Как сделать самодельного робота / Мусор в дело / Самоделка.net – Сделай сам своими руками
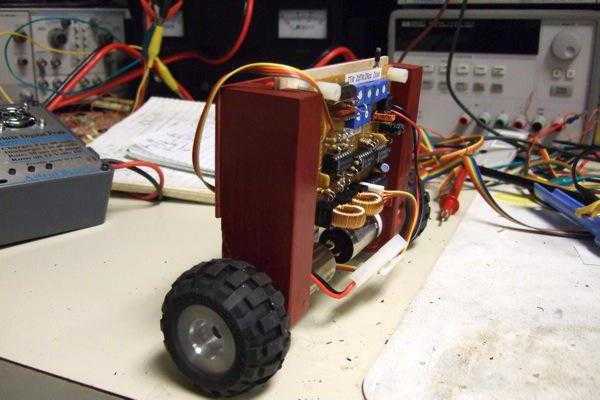
Собираем самодельного мини робота из радиодеталей.

Про то как сделать самодельного робота у нас уже писали. Конечно, это были игрушечные роботы, которых делали из хлама, деталей и маханизмов и даже из обломков офисной техники.
Но сегодня пойдем дальше и доберемся до самых основ – сделаем самодельного робота из радиодеталей.
В наше время бытовая электроника развивается очень быстро, настал век микросхем и чипов, поэтому старая аппаратура зачастую идет на выброс из-за поломок или по причине морального устаревания.
Но многие мастера по привычке вынимают и собирают радиодетали из этой техники. Некоторые находят применение при ремонте таких же приборов, но основная масса оседает в коробках, ящиках и других складских емкостях. К тому частенько выпаянные детали не лучшего качества и могут пойти только на то чтобы сделать самодельного робота.
В общем, хватит лирики давайте сделаем робота.

— Надеюсь, вы уже нашли старый прибор, вскрыли его и выпаяли, откусили или открутили все радиодетали. И конечно же сложили их по типоразмерам в коробочки с наклейками для разных роботов 😉
— Для того чтобы сделать самого простого самодельного робота (например как первого слева на первой картинке) нам потребуется большая деталь … конденсатор (вообще какая разница, буду называть их по форме ведь для нас важнее) Итак для туловища робота берем большой бочонок.
— Также ищем четыре парных бочонка для рук и ног.
— Два небольших бочонка для глаз самодельного робота.
— Рот и нос будем делать из плоских круглых в форме тарелочек деталей.
Уф, весь набор деталей собран теперь завершающий этап – как все собрать и сделать самодельного робота.
Нам понадобится тонкие круглогубцы, кусачки, паяльник и припой, а также суперклей (используйте клей гель – он не течет!).
У бочонков, приготовленных для ног, делаем на концах контактов круглые колечки круглогубцами. Чтобы они не разгибались, припаиваем концы колечек.
Дальше ноги присоединяем к таким же колечкам, сделанным внизу туловище самодельного робота, их кончики тоже опаиваем.
Т.к. у туловища сверху нет выходящих контактов, то голову будем соединять сначала с руками робота, а затем прикрепим к туловищу.
Итак, контакты от бочонков для рук припаиваем к тарелочкам носа и рта (можно предварительно сделать скрутку проводков). Затем сверху на них накладываем и припаиваем бочонки глаз. Все контакты от этих деталей придется спаять в кучу, оставив лишь один из которого делаем колечко над головой самодельного робота, за которое его и будем его подвешивать. На этом этапе придется поработать кусачками и плоскогубцами, а также напаять олова, но это не сложно.
Теперь мы собрали воедино голову с руками и осталось приделать их к туловищу робота. Тут нам поможет суперклей, лучше в виде геля. Капаем на крышку бочонка-туловища и прикладываем к нему тарелочку-рот.
Все теперь вы знаете,как сделать самодельного робота. Секрет мастерства раскрыт и можно переходить к более сложным экземплярам, например роботам животным – как на следующем фото. Детали и принципе те же, но помимо них использованы разноцветные провода.

Можно сделать самодельного робота -собаку, дикобраза… да что угодно. И когда поделка будет готова можно попытаться, сделать фото-сессию с настоящим живым котом 😉
Мастерство можно совершенствовать вплоть до портретного сходства – вот смотрите на кого похоже? – правильно дед в ушанке и очках — русское национальное лицо 😉

В общем главное в рассказе о том как сделать самодельного робота это принцип, а дальше только Ваше видение предмета и творчества – Удачи в роботостроении!
samodelka.net
Как сделать боевого робота? – Robohunter
Источник: http://www.instructables.com
Перевод: http://robotics.com.ua/
Боевые роботы Battle Bot, как правило, довольно интересные и разнообразные. Мы представляем вам инструкцию одного мини-робота Battle Bot, который небольшой, очень легкий и простой в создании.
Вы его можете собрать в любое свободное и удобное для вас время. Он не требует дорогостоящих деталей и инструментов. Так что, приступим!
1 – серводвигатель и колеса; 2 – лезвие
Шаг 1. Материалы и инструменты:
Большинство материалов для робота можно найти прямо в доме, но если чего-то не хватает, их можно купить очень дешево.
- двигатель (12 Вольт)
- небольшое лезвие-пила
- несколько проводов
- два сервопривода
- 6-вольтная батарея
- 12-вольтная батарея
- колеса
- алюминиевая пластина
- небольшие винты
- небольшие болты
- радиоприемник
- радиопередатчик
- 2 зажимы
- суперклей
- переключатель
Инструменты:
- дрель или инструмент дремель
- ножницы для резки жестких материалов
- отвертки
- плоскогубцы
- заклепки
1 – серводвигатели и колеса; 2 – двигатель; 3 – плоскогубцы, батареи, передатчик и болты; 4 – передатчик и инструмент с заклепками; 5 – ножницы для резки жестких материалов.
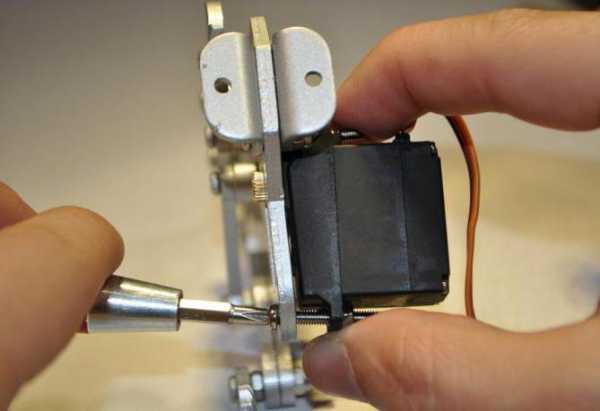
Шаг 2. Колеса и сервоприводы:
Прежде всего, вам нужны две среднего размера сервоприводы, которые могут быть куплены на eBay и во многих других местах. Они должны быть настроены так, чтобы совершать полный оборот при использовании.
Колеса могут быть приклеены, желательно суперклеем к винтам сервопривода, это удержит их на месте. Могут быть использованы колеса практически любого размера.
1 – колесо, приклеенное к сервоприводу; 2 – настроенный сервопривод.
Шаг 3. Тело робота:
Это, пожалуй, самая трудная часть нашей работы. Тело робота может быть сделано, как вы пожелаете. Данный пример имеет тело в форме треугольника. Это вполне оптимальная форма для устройства, и её не сложно сделать.
Одну металлическую пластину нужно разрезать размером около 10×21 см вместе с алюминиевой пластиной.
После этого вам понадобиться 4 кусочка алюминиевой пленки размерами около 4×1 см для установления сервоприводов на место и поддержки частей из двух алюминиевых пластин 9×4 см. После вырезания этих кусков, можно соединять части вместе.
1 – алюминиевая пластина 10х21 см.
Шаг 4. Сборка частей вместе:
Для основы робота нам нужно четыре небольшие части 4х1 см. Они должны быть согнуты в размере около 1 см с одной стороны пластины, формируя L-образный кусок. В нижней части этого куска нужно сделать отверстия. Они должны быть расположены ближе к середине L-куска.
Верхняя часть L-пластины также должна иметь два отверстия, просверленные и распределены отдельно настолько, чтобы соответствовать сервоприводам.
Отверстия должны быть размещены на нижнем металлическом листе (10×21 см) одинаково по отношению друг к другу так, чтобы держать сервопривод на месте. Он будет находиться на задней части основы.
Установите два L-куска на расстоянии 3,5 см и 8,5 см от задней части основы. Они также должны быть на расстоянии около 1 см, так что сервопривод может поместиться свободно, немного выступая за края пластины.
Теперь закрепите куски на месте, и вы получите начальную стадию тела робота.
1 – L-образный алюминиевый кусок.
1 – сервопривод отлично помещается между алюминиевых пластинок.
Шаг 5. Задняя часть тела робота:
Для задней части тела робота нам необходимо создать немного места для лезвия с алюминиевыми обрезками 9х4 см. Нам нужно согнуть всего один см этих частей на обеих сторонах в форме U или C, так чтобы нижняя часть была соединена с основой, а верхняя часть должна соединяться с крышкой тела робота. Два отверстия должны быть расположены равномерно на верхней части, а два остальных отверстия – на нижней части в форме С.
Другие два отверстия должны быть расположены на действующей металлической пластине на одной линии с основой двух пластин в форме U или C.
Эти куски должны быть размещены на крае другой стороны основы и прикреплены заклепками на нужном месте.
Для последней части вам необходимо соединить алюминиевый кусок 10 х 4 см и основу, чтобы она вместилась вокруг двигателя с немного места на конце. Это позволяет изогнутый конец соединять с верхней частью алюминиевой части, оставляя место для двигателя. Для этого нужно просверлить отверстия на задней части верхней пластины, а другие отверстия на конце металлического листа, чтобы он мог надежно держаться на крышке.
1 – кусок на конце пластины.
1 – задняя часть тела робота с огромным вырезом для лезвия.
1 – держатель для двигателя; 2 – небольшое отверстие для болта на крышке.
1 – деталь в форме вопросительного знака; 2 – место на конце части.
Шаг 6. Передняя часть тела робота:
Теперь вам нужно сделать переднюю часть тела, это очень легко сделать, используя два навеса, они будут размещаться на другой стороне передней части основы. На основе нужно просверлить отверстие, где вы увидите отверстия на навесах. Если вы это сделали, нужно закрепить навесы с помощью заклепок, и у вас выйдет нижняя часть тела робота.
1 – навесы на конце нижней части тела робота; 2 – заклепанно на месте.
1 – законченная нижняя часть робота.
Шаг 7. Верхняя часть тела робота:
Для верхней части необходимо вырезать лист алюминия около 21×10 см для задней части с помощью ножниц для резки жестких материалов. Прямоугольник необходимо вырезать так, чтобы лезвие смогло поместиться удобно внутри, с большим зазором.
Передняя часть должна быть настолько отмеряна, чтобы отверстия могли стать местами для навесов, а навесы смогли поместиться на другой стороне. Это позволит верхней части качаться при открытии и закрытии. Просверлите 4 отверстия для навесов и закрепите их с помощью заклепок.
С держателем для мотора, собранным раньше для основной части, найдите, где отверстие сочетается с конечной частью, так чтобы отверстие было создано на верхней части. Это используется, чтобы болт мог затянуться, и это усилит действие двигателя на крыше робота. С правильно расположенным отверстием вы можете закрепить навесы на верхней части основы.
4 отверстия также необходимы, чтобы верхняя часть могла соединяться с другими деталями. Болты должны быть установлены, чтобы соединить эти части вместе.
1 – навесы соединены заклепками с верхней частью; 2 – Отверстие для крепления болтов, используемых для двигателя.
1 – большой разрез для лезвия.
1 – отверстие нужно закрепить болтом, чтобы держать двигатель, который помещается на части справа; 2 – отверстия, чтобы соединить болты с верхней частью.
Шаг 8. Электроника:
Теперь, когда основной корпус робота готов, нужно установить электронику, чтобы робот смог двигаться. Первую часть нужно соединить с сервоприводом и L-образным куском на основе. Лучше использовать шурупы от сервопривода, хотя также вместо этого можно использовать болты.
Эту часть нужно соединить с каналами 1 и 2 приемника, а также батареями приемника. Все это нужно приклеить к основе робота.
1 – сервоприводы с колесами, прикрепленными к L-части;
1 – сервоприводы должны подсоединяться к этом.
1 – батареи; 2 – сервоприводы, соединенные с батареями.
Шаг 9. Оружие:
Вы можете выбрать любое оружие. В данном примере используется лезвие-пила, подключенное к двигателю. Это, конечно, не самое лучшее оружие, но оно работает на достаточно высокой скорости. Для того, что бы его установить, нужно приклеить два пластмассовых куска вокруг большого отверстии на лезвие, используя суперклей.
Небольшое отверстие нужно сделать посредине пластмассового куска, где соединяется двигатель. Двигатель поместите на держатель, установленный на основе.
1 – лезвие-пила; 2 – запасной пластиковый кусок для соединения двигателя.
1 – двигатель соединен с лезвием.
1 – двигатель помещен в держатель.
Шаг 10. Фиксация проводов:
Двигатель можно легко зафиксировать проводами, соединив всего два провода с батареей и переключателем. Это будет означать, что когда переключатель поворачивается, двигатель начинает вращаться, а вместе с ним и лезвие. Если повернуть другой переключатель на приемнике, это позволит колесам поворачиваться с помощью передатчика.
1 – батареи; 2 – переключатель; 3 – двигатель с лезвием.
Шаг 11. Заключительная часть:
Наконец разместите болты в задней части, чтобы держать верхнюю часть должным образом, а также для моторной части, так чтобы двигатель получал импульсы верхней части основы. Это в значительной степени завершает BattleBot. Теперь можете наблюдать, как робот двигается вперед и уничтожает предметы на своем пути. При желании можно добавить микроконтроллер и запрограммировать робота на более сложные действия.
1 – лезвие; 2 – сервопривод и колеса.
robo-hunter.com
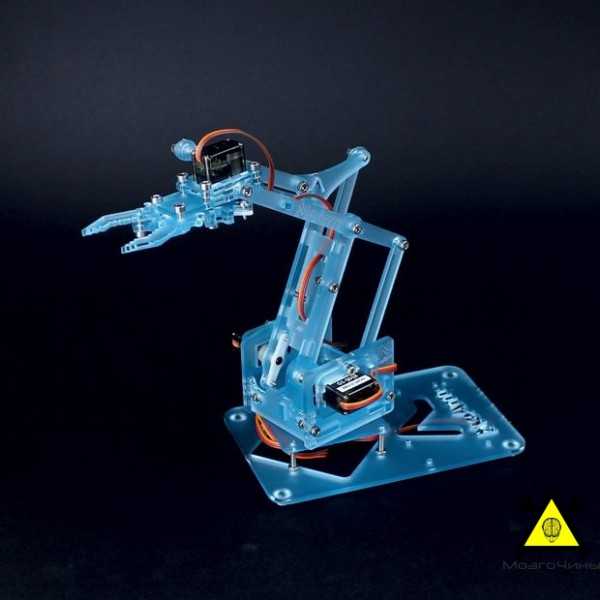
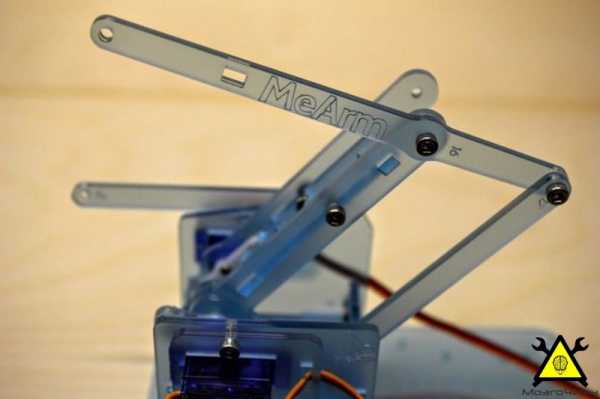
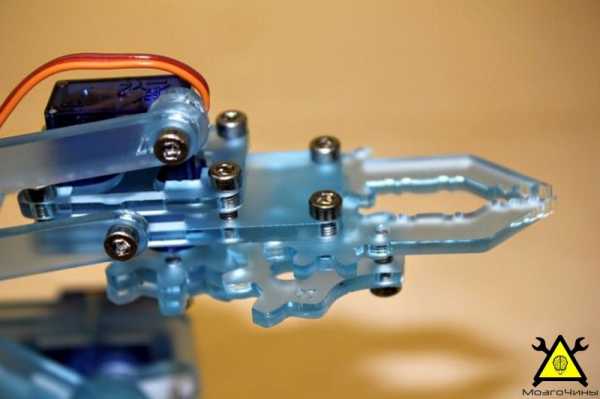
MeArm или как сделать руку робота своими руками
Перевёл alexlevchenko для mozgochiny.ru
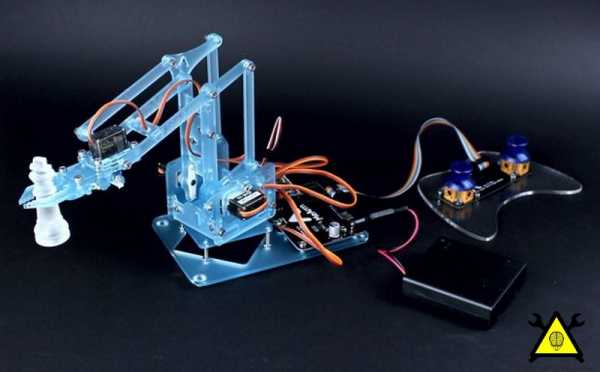
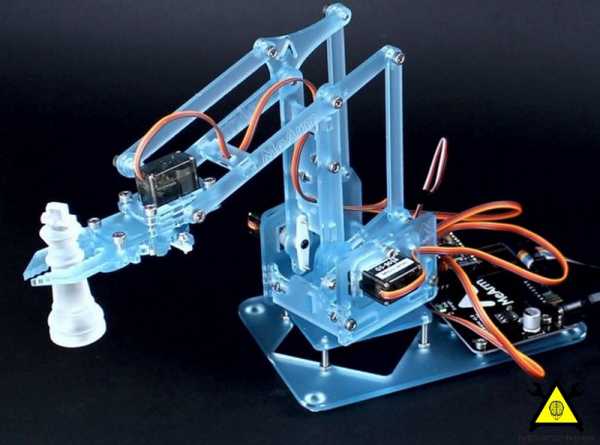
Перед вами, дорогие мозгочины, пример сборки MeArm робоманипумятора. MeArm впервые был показан миру в апреле 2014. С тех пор на просторах интернета демонстрировались различные модификации данной поделки.
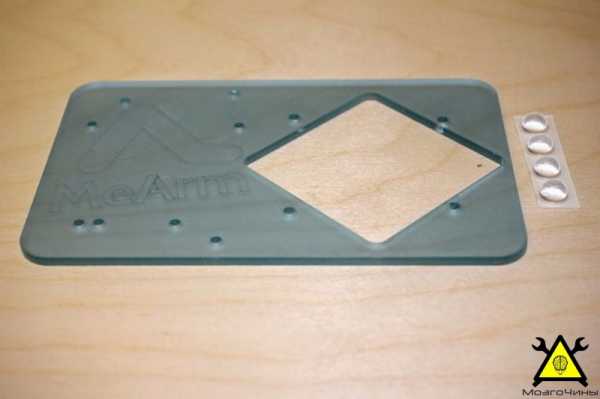
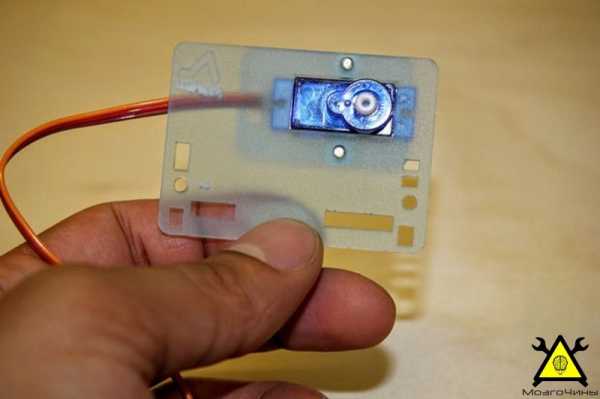
Шаг 1:
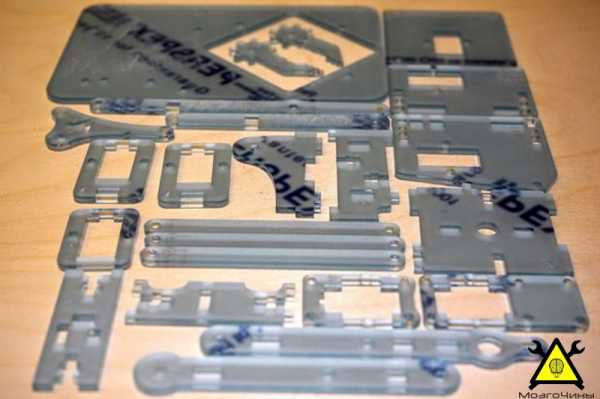
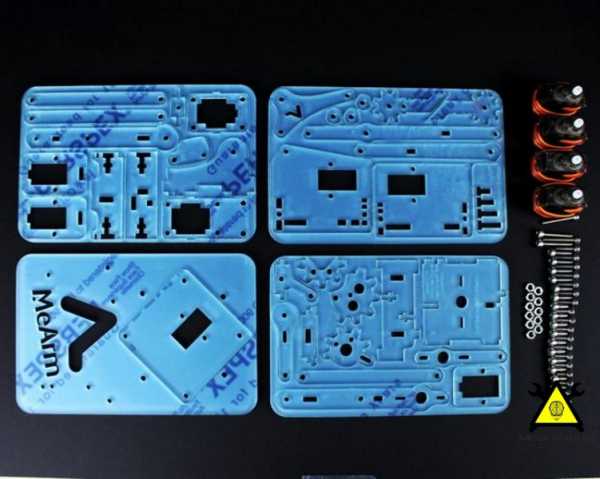
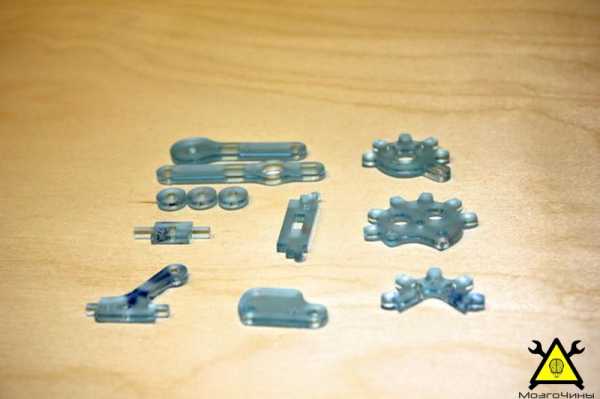
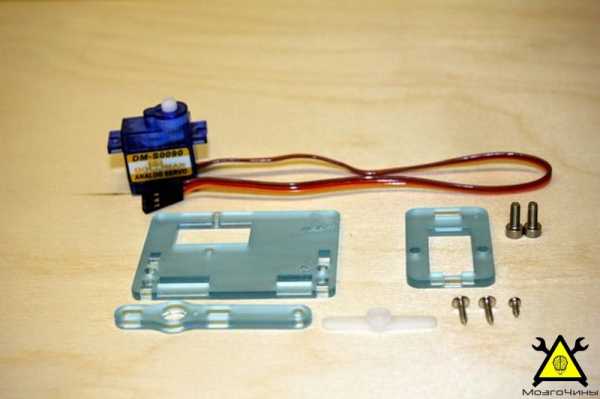
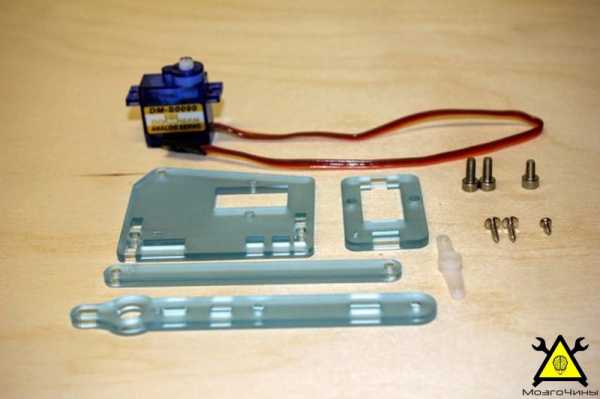
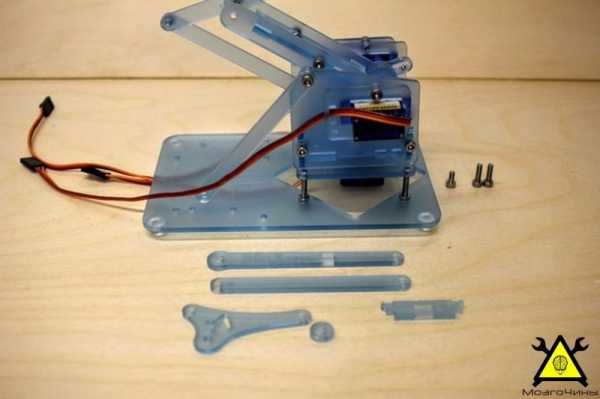
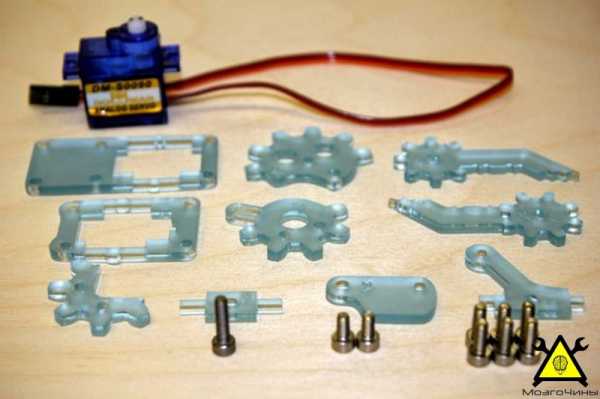
Шаблон робота. В проекте использовался 3мм акрил, но конструкция имеет запас по «творческому потенциалу», поэтому составные детали можно изготовить из дерева или даже напечатать на 3D принтере.
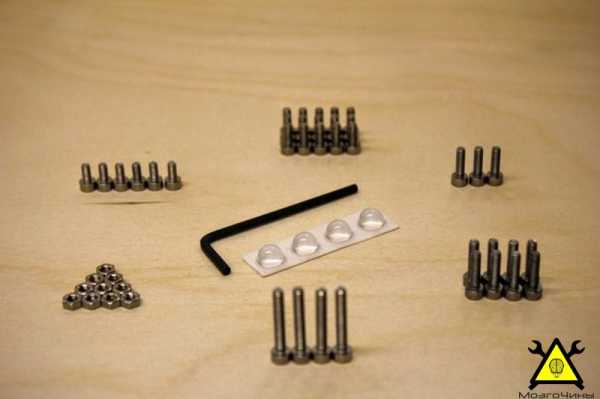
Кроме деталей, вы будете нуждаться в большом количестве крепежных элементов:
- Гайка – 11 шт;
- 6мм болт – 7 шт;
- 8мм болт – 15 шт;
- 10мм болт – 5 шт;
- 12мм болт – 8 шт;
- 20мм болт – 4 шт.
Резьба болтов и гаек М3.
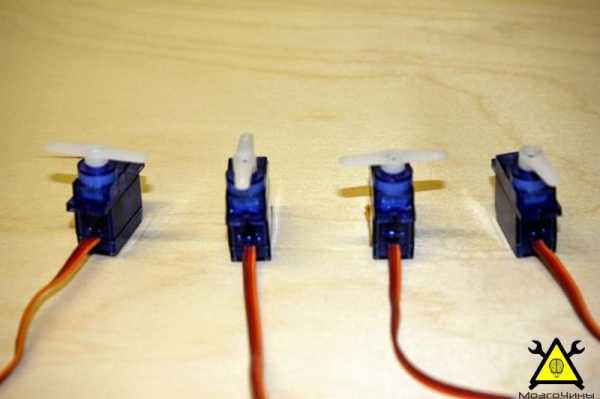
Шаг 2: Проводим калибровку
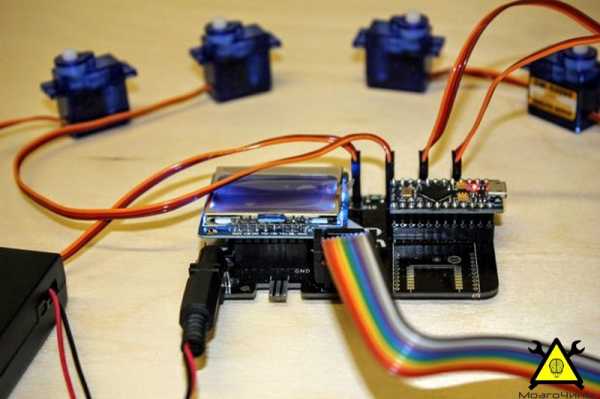
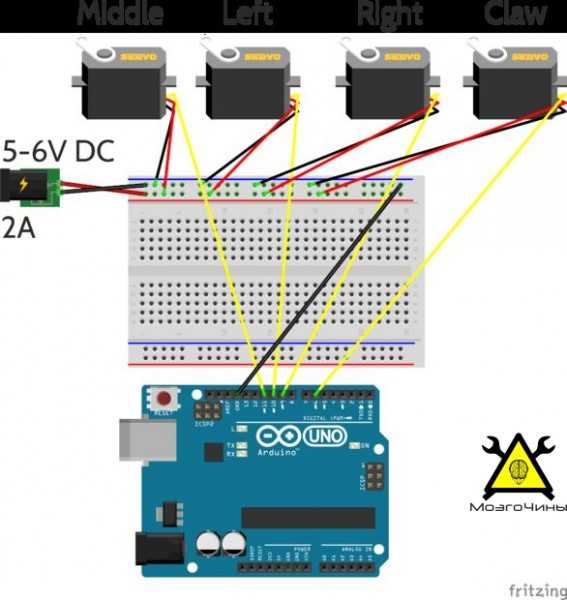
Перед порезкой акрила, важно выполнить калибровку сервоприводов. В этом случае будем использовать Brains Board, которая является совместимой с Arduino. Вы можете использовать любое другое устройство для генерации ШИМ-сигнала для калибровки моторчиков. Код MeArm подходит для Arduino, Raspberry Pi, Beaglebone Black, Sparkcore and Espruino.
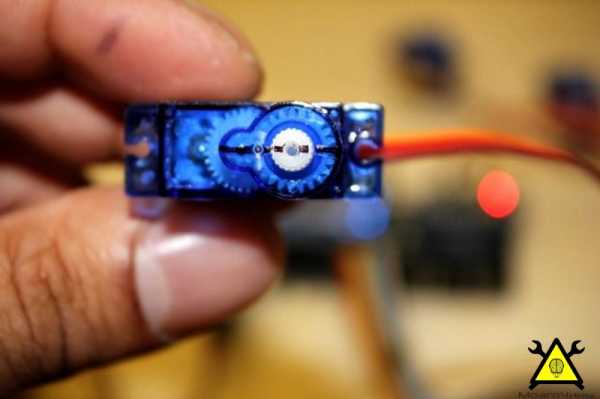
Используя Brains Board, запрограммируем углы поворота сервопривода для центра, левого и правого края и клешни соответственно (90, 90, 90 и 25). Отметим центральную линию на шпинделе и корпусе сервопривода.
Код для калибровки серво на Arduinо.
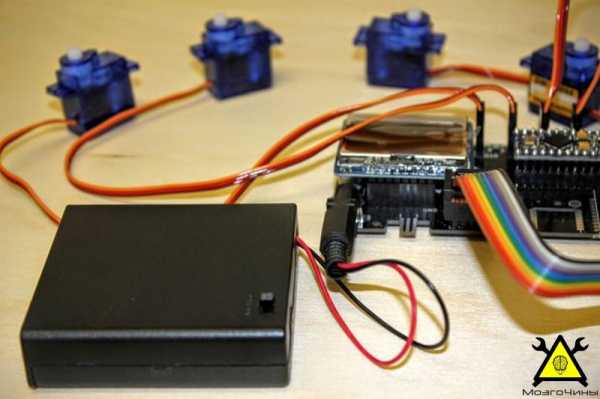
Самое важное – для питания приводов необходим отдельный источник питания 5-6V, 2A, с общей землёй для микроконтроллера.

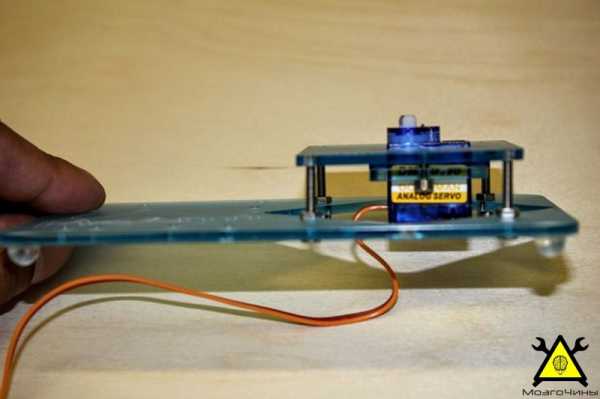
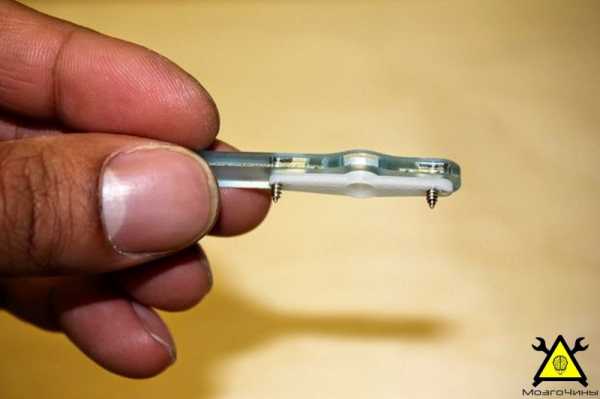
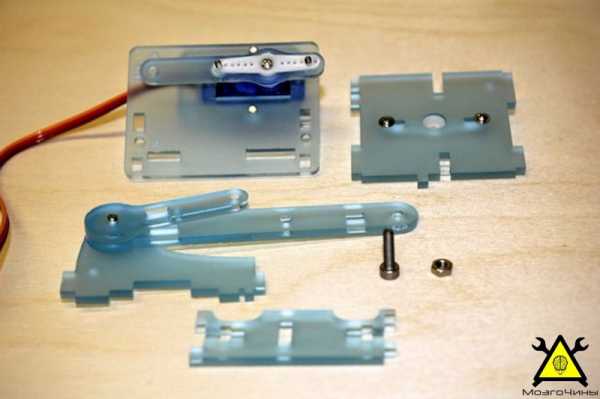
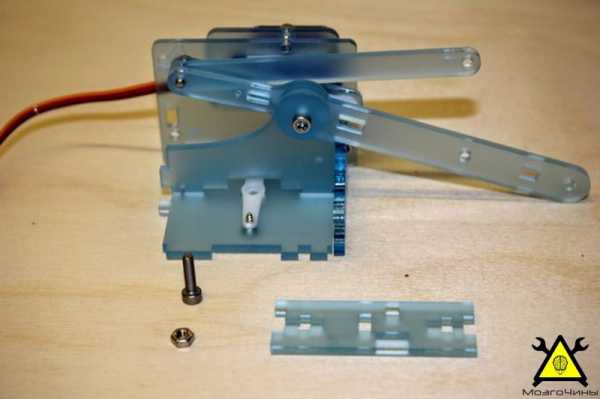
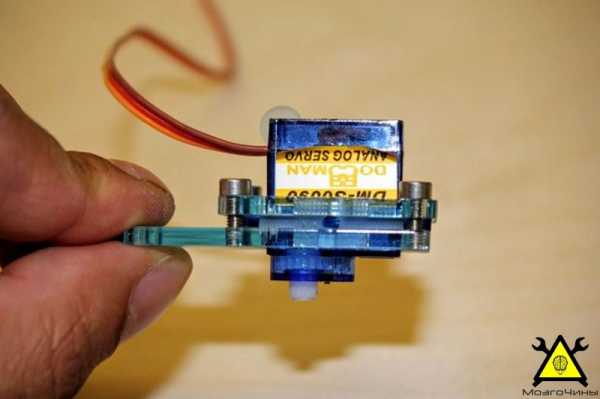
Шаг 3: Приступаем к сборке
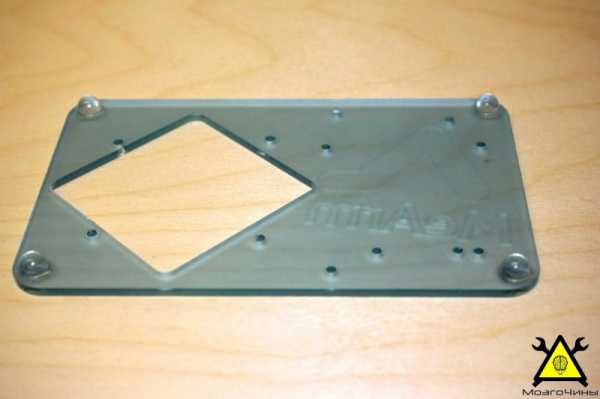
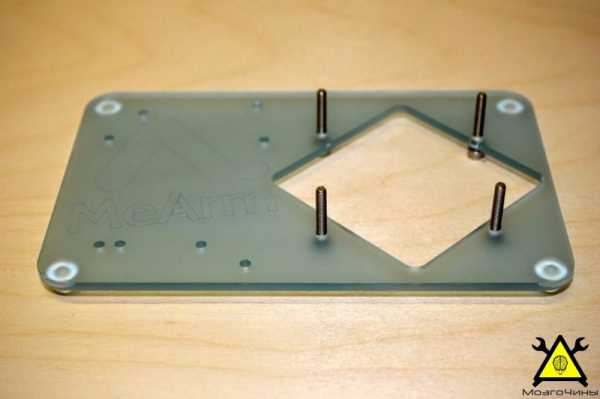
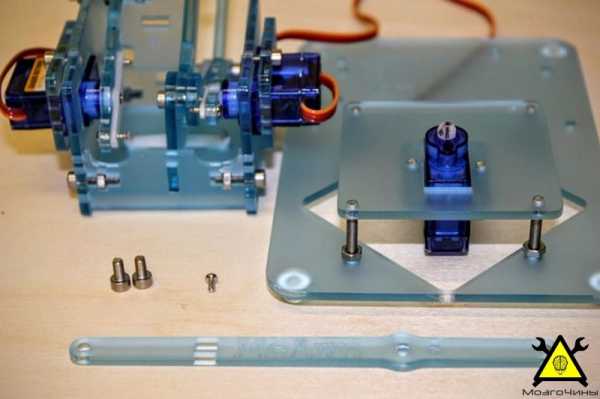
Возьмём основание и прикрепим ножки к её углам. Затем установим четыре 20 мм болта и накрутим на них гайки (половину от общей длины).
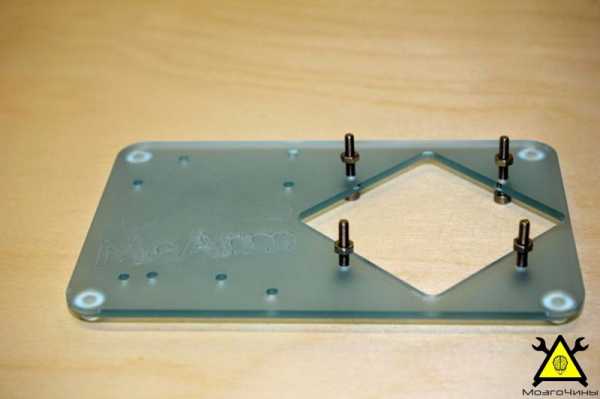
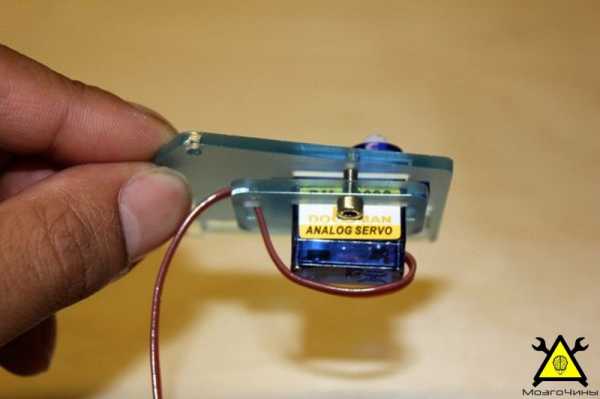
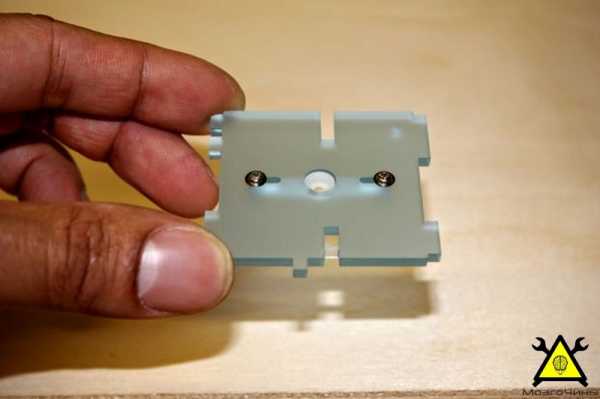
Теперь возьмём две пластины, центральный сервопривод и два 8-мм болта.
В конструкции MeArm есть два типа отверстий: одно около 3 мм, куда болт заходит свободно, а другой – около 2.6 мм, где болт самостоятельно нарезает себе резьбу.
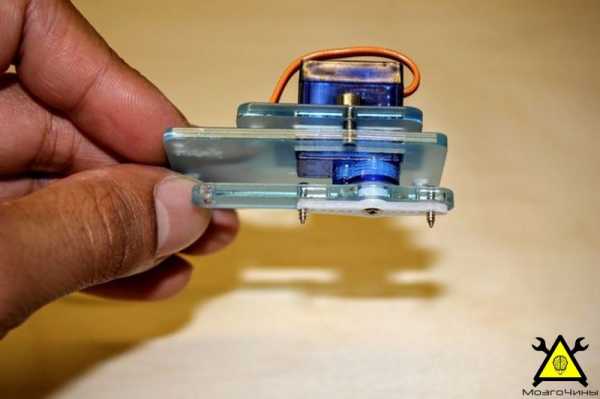
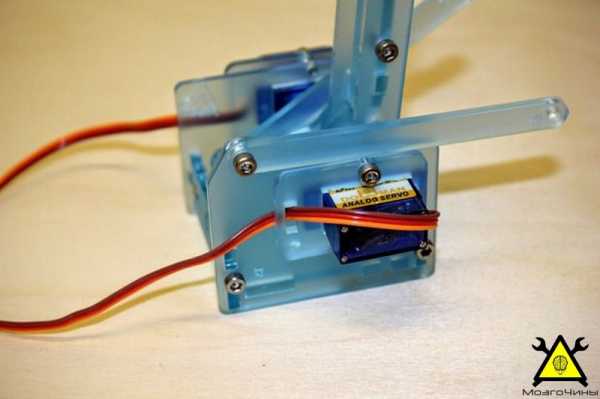
Теперь закрепляем сервопривод вместе с «воротником» на основе с помощью 20 мм болтов.
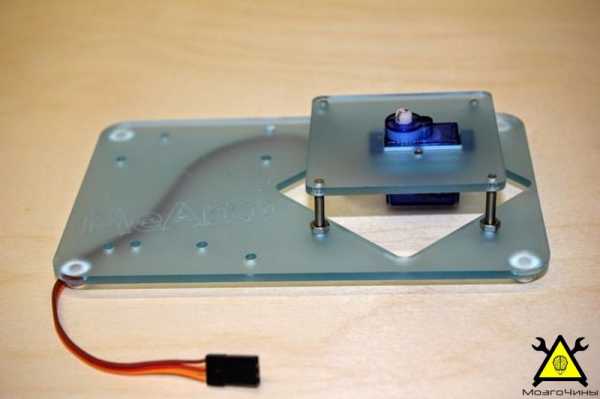
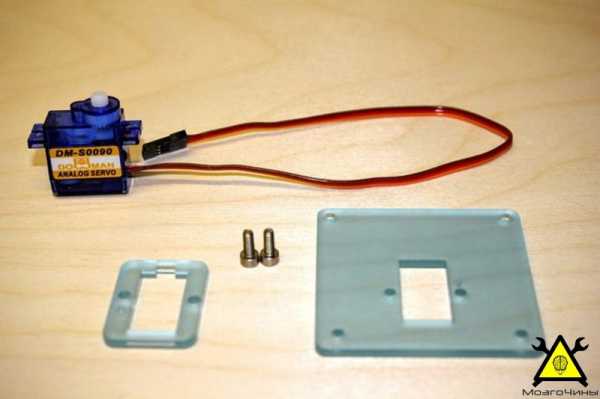
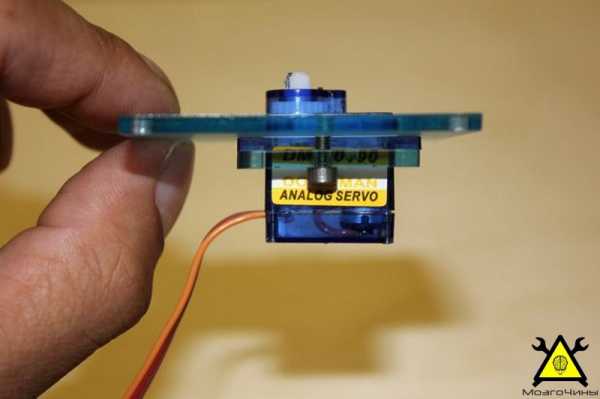
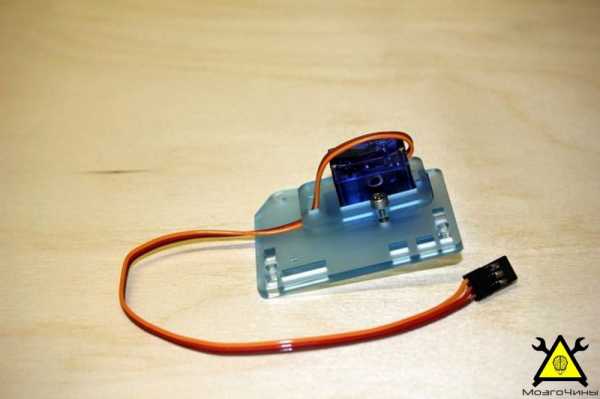
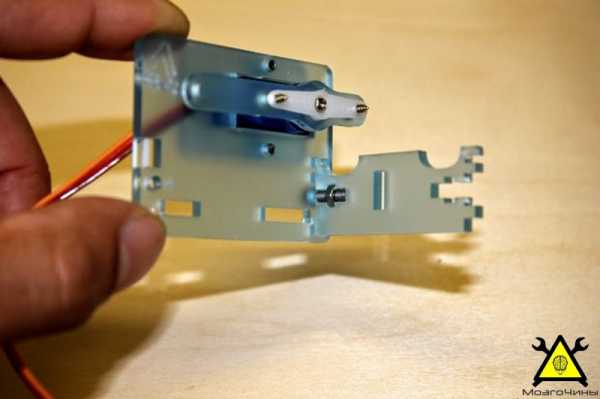
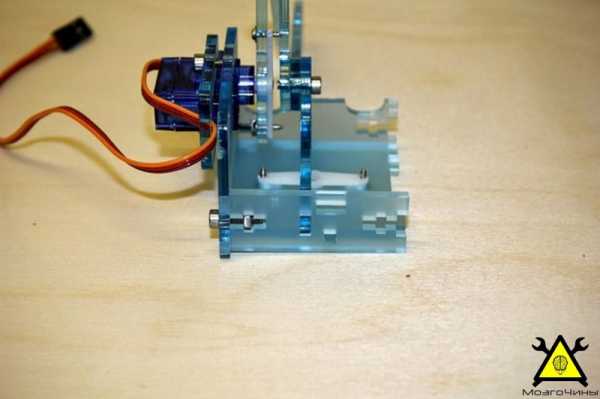
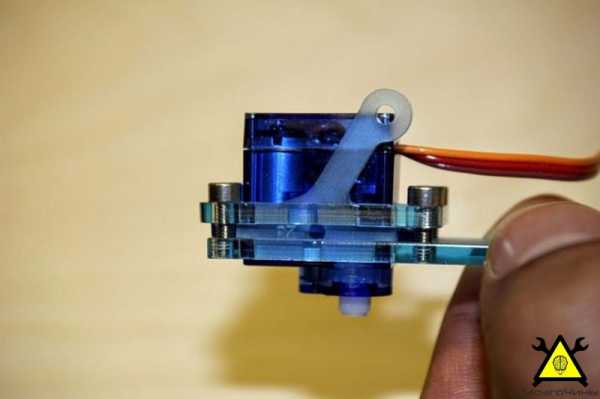
Шаг 4:

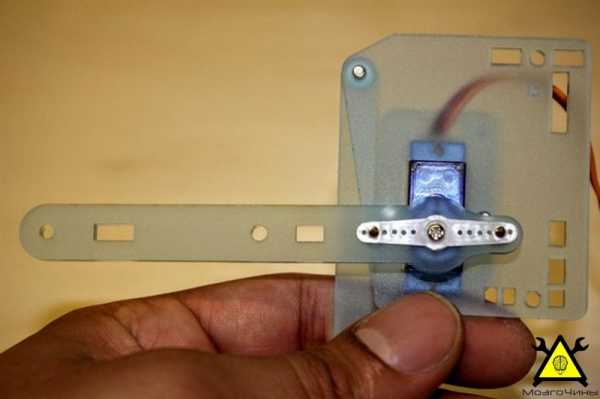
Проденем сервопривод через «воротник», после чего прикрутим всё 8 мм болтами (не затягивайте слишком туго), а провода пропустим через отверстие.

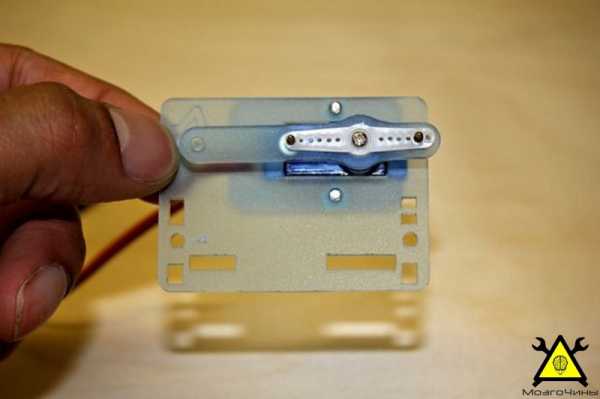
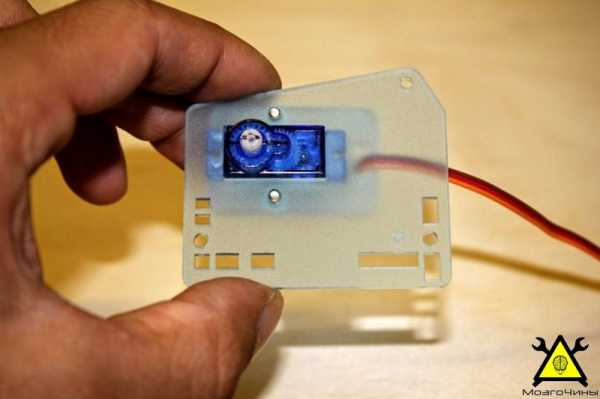
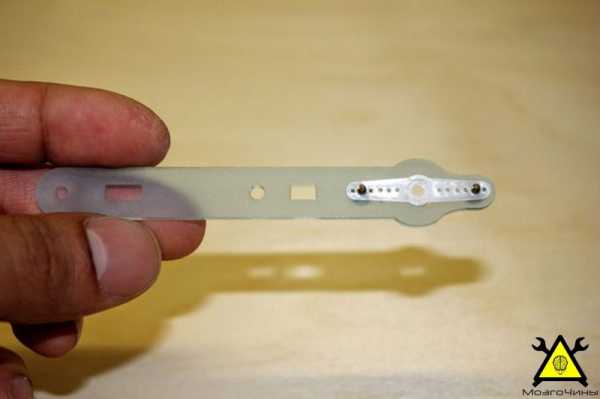
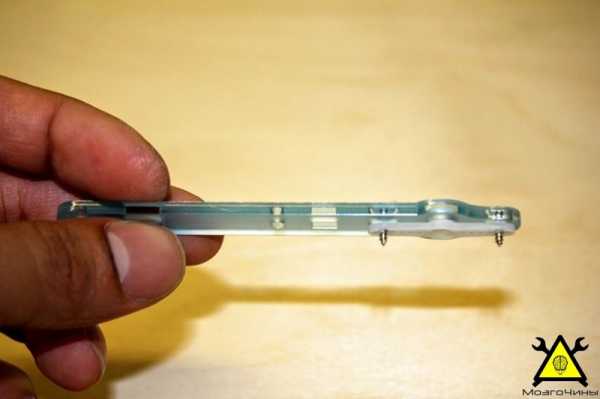
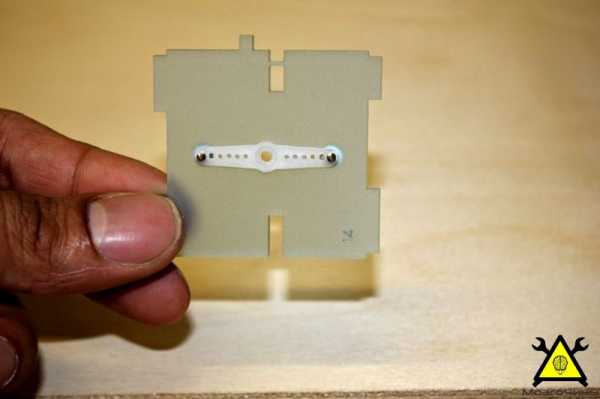
Теперь закрепим белый кронштейн на рычаге серво, используя острые саморезы из набора креплений. Они будут самостоятельно врезаться в белый пластик. Будьте внимательны, чтобы саморезы заходили в материал строго под прямым углом (Это очень важно).
Прикрепим кронштейн на откалиброванный сервопривод. Он должен строго располагаться параллельно краям деталей.
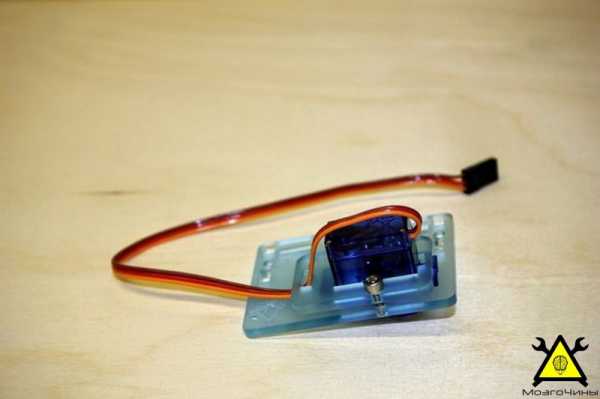
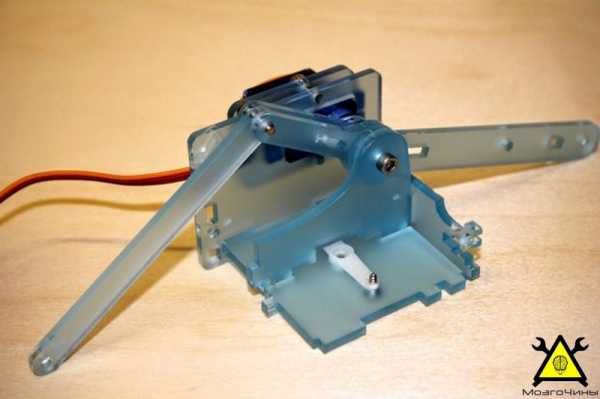
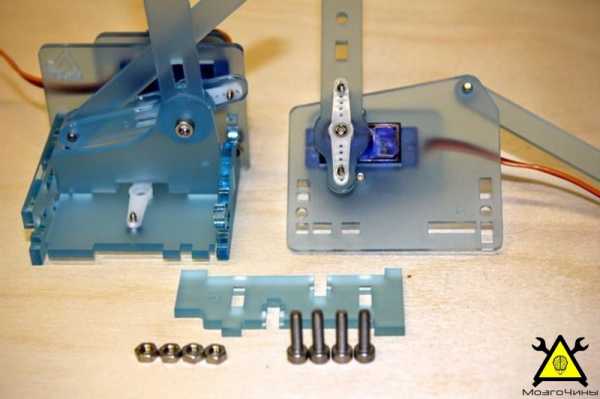
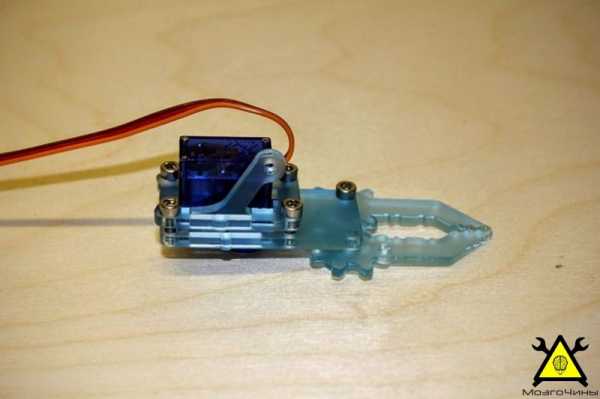
Шаг 5:
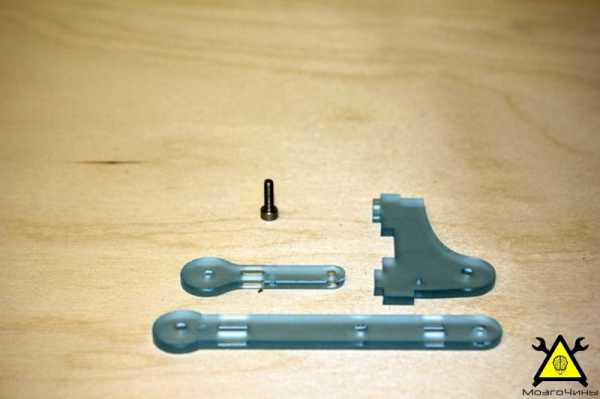
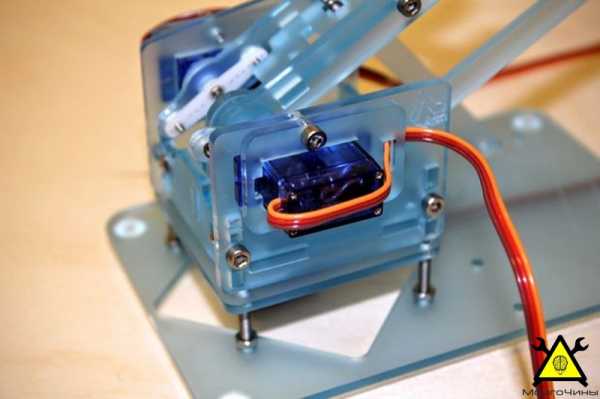
Возьмем акриловые детали, два 8-мм шурупа, 6 мм винты, сервопривод и кронштейн.
Прикрутим сервопривод к «воротнику», а провод протянем через отверстие.
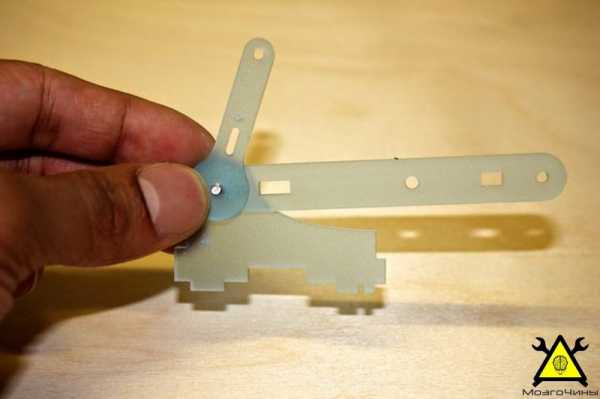
Прикрепим белый кронштейн к движущемуся рычагу, используя саморез. Установим этот рычаг повернутым на 90 градусов к длинной стороне боковой пластины.
Закрепим продолговатую часть акрила к боковой пластине, используя 6мм болт.

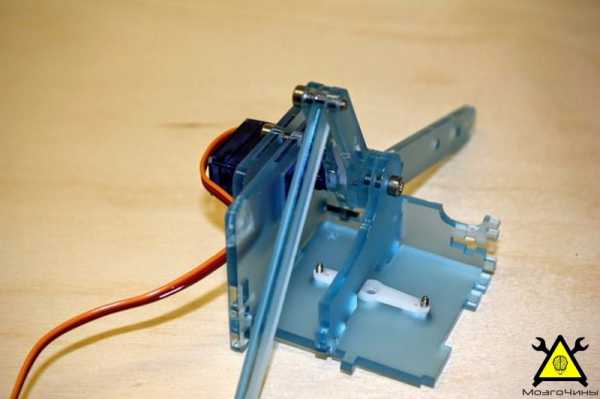
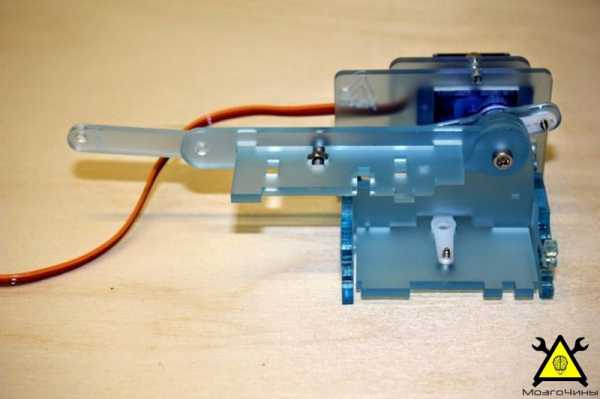
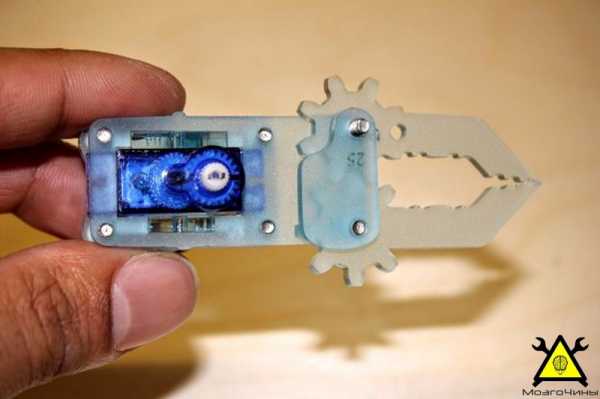
Шаг 6:
Эта часть соединяется с левой и правой секциями.
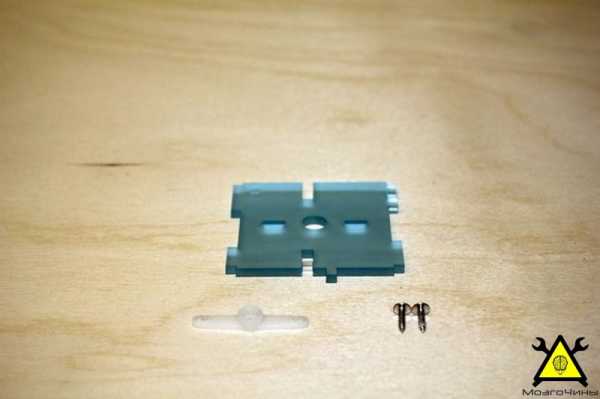
Для базы возьмём акрил, кронштейн и набор креплений. Тщательно проводим подгонку кронштейна и крепим его с помощью острых саморезов.
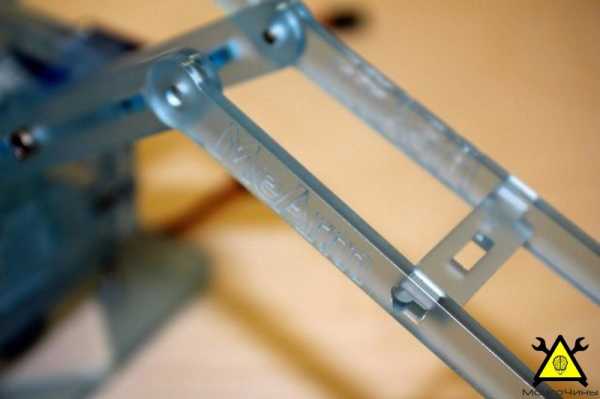
Для основы возьмём 3 акриловые детали и 10 мм болты. Важно, чтобы перемещение по оси (болта) было свободным. Если они не двигаются по прямой траектории, то открутите болт, выставьте их вместе и закрутите снова, так чтобы они были параллельными.
Шаг 7:
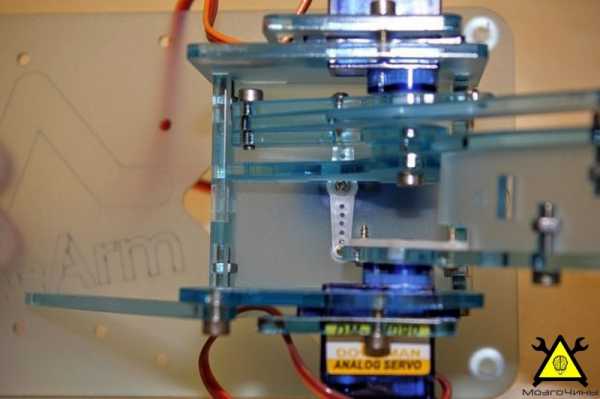
Начинаем соединять левые и правые части вместе, используя середину.
Сначала прикрепим левую часть 12мм болтом и гайкой. Самый простой способ сделать это протолкнуть 12мм болт через левую часть и повернуть гайку на полоборота или около того. Вставим паз поверх гайки и затянем крепёж. Не затягивайте слишком сильно.
Теперь прикрепим заднюю стойку, используя 12 мм болт и гайку, как на передней стойке.
Шаг 8:

Теперь перейдём к креплению правой стороны к остальной части узла.
Не торопитесь и будьте терпеливы. Этот шаг является наиболее сложным во всей сборке.
Шаг 9:
Теперь у нас есть центр, который можно прикручивать на базу.
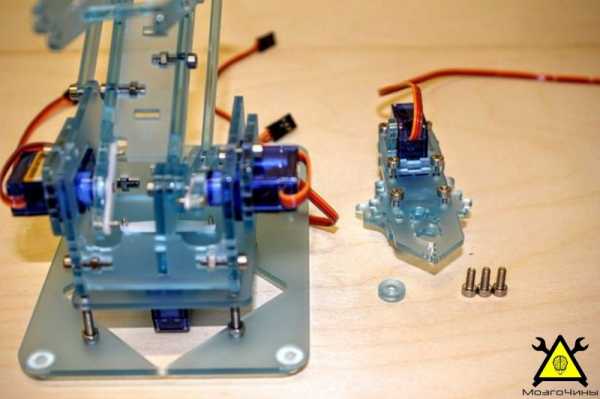
Шаг 10:
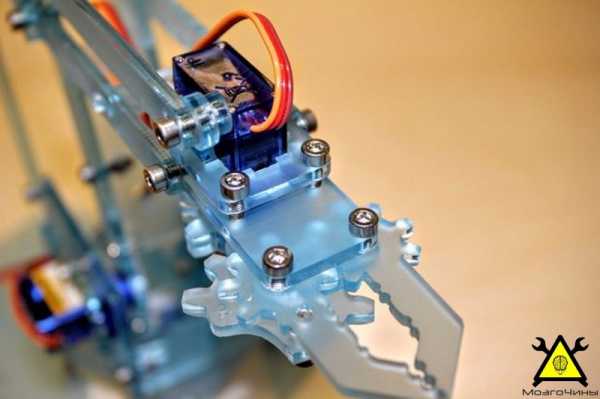
Первое, что нужно сделать, это закрепить крюк на предплечье, которое только что закрепили.
Прикрепим треугольную часть 10-мм болтом. Не затягивайте, все эти детали должны двигаться свободно.



Шаг 11: Изготавливаем клешню

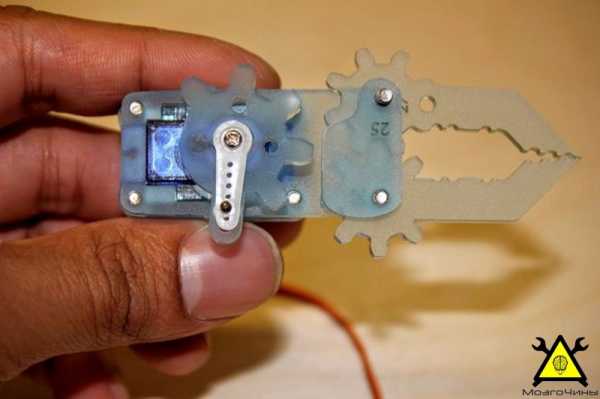
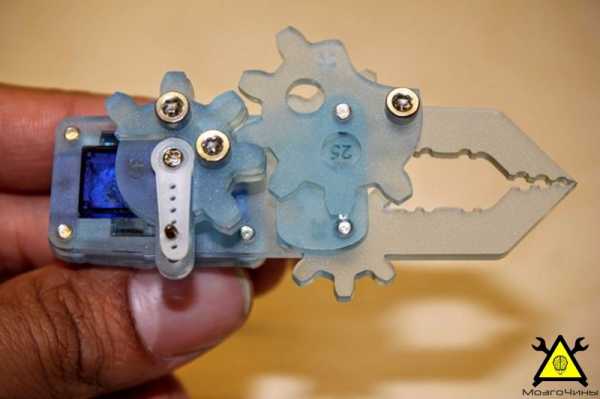
Шаг 12:
Спасибо за внимание!
(A-z Source)
ПОДЕЛИТЕСЬ С ДРУЗЬЯМИ!
About alexlevchenko
Ценю в людях честность и открытость. Люблю мастерить разные самоделки. Нравится переводить статьи, ведь кроме того, что узнаешь что-то новое – ещё и даришь другим возможность окунуться в мир самоделок.mozgochiny.ru