Радио управление 10 команд своими руками

В этой статье, вы увидите как сделать радиоуправление на 10 команд своими руками. Дальность действия данного устройства 200 метров на земле и более 400м в воздухе. Нажатие кнопок может производиться в любой последовательности, хоть все сразу все работает стабильно. С помощью его можно управлять разными нагрузками: воротами гаража, светом, моделями самолетов, автомобилей и так далее… В общем чем угодно, все зависит от вашей фантазии.
Для работы нам потребуются список деталей:
1) PIC16F628A-2 шт (микроконтроллер)
2) MRF49XA-2 шт (радио трансмиттер)
3) Катушка индуктивности 47nH (или намотать самому)-6шт
Конденсаторы:
4) 33 мкФ (электролитический)-2 шт
5) 0,1 мкФ-6 шт
6) 4,7 пФ-4 шт
7) 18 пФ-2 шт
Резисторы
8) 100 Ом-1 шт
9) 560 Ом-10 шт
10) 1 Ком-3 шт
11) светодиод-1 шт
12) кнопки-10 шт
14) Текстолит
15) Паяльник
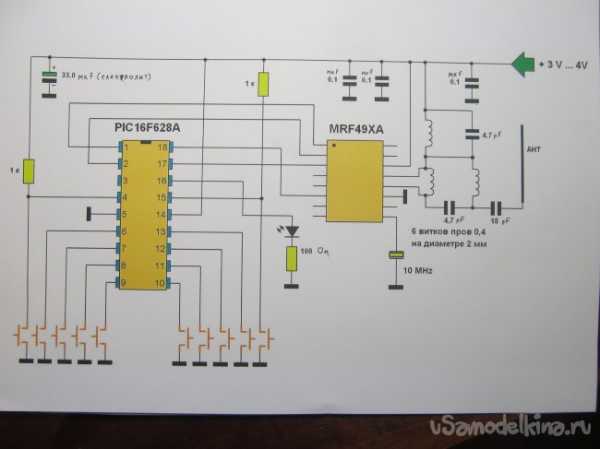
Вот схема этого устройства
Передатчик
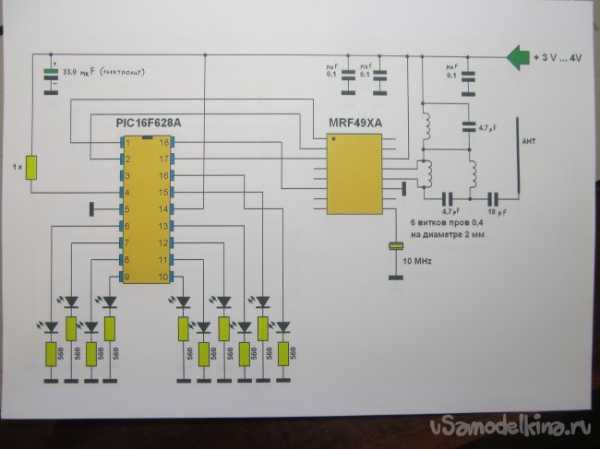
И приемник
Как видите устройство состоит из минимум деталей и под силу каждому. Стоит только захотеть. Устройство очень стабильное, после сборки работает сразу. Схему можно делать как на печатной плате. Так и навесным монтажом (особенно для первого раза, так будет легче программировать). Для начала делаем плату. Распечатываем
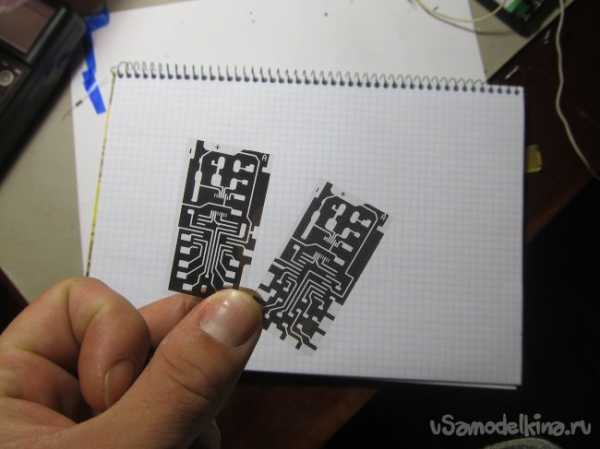
И травим плату

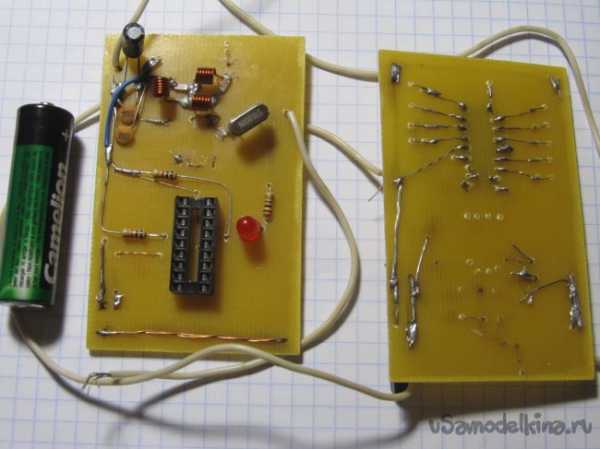
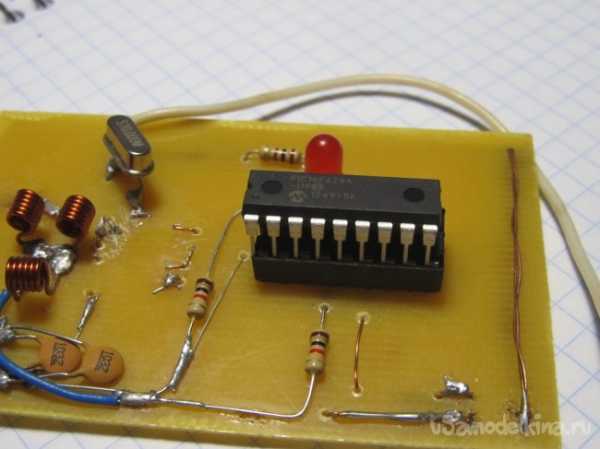
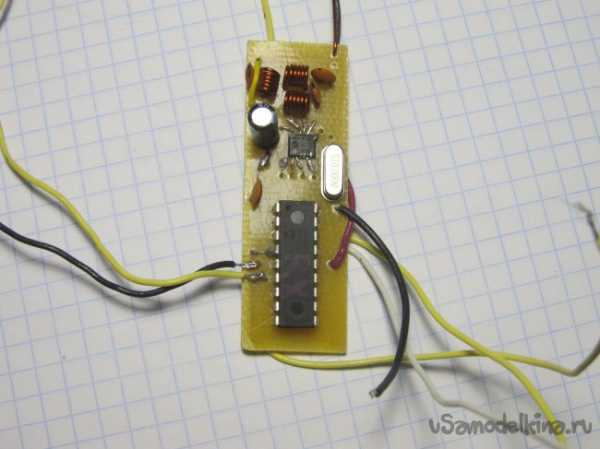
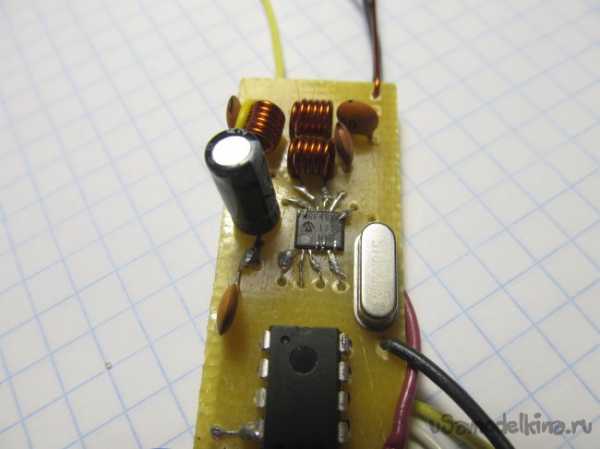
Припаиваем все компоненты, PIC16F628A лучше припаивать самым последним, так как его нужно будет еще запрограммировать. Первым делом припаиваем MRF49XA
Главное очень аккуратно, у нее очень тонкие выводы. Конденсаторы для наглядности. Самое главное не перепутать полюса на конденсаторе 33 мкФ так как у него выводы разные, один +, другой -. Все остальные конденсаторы припаиваете как хотите у них нет полярности на выводах


Катушки можно использовать покупные 47nH но лучше намотать самому, все они одинаковые (6 витков провода 0,4 на оправке 2 мм)

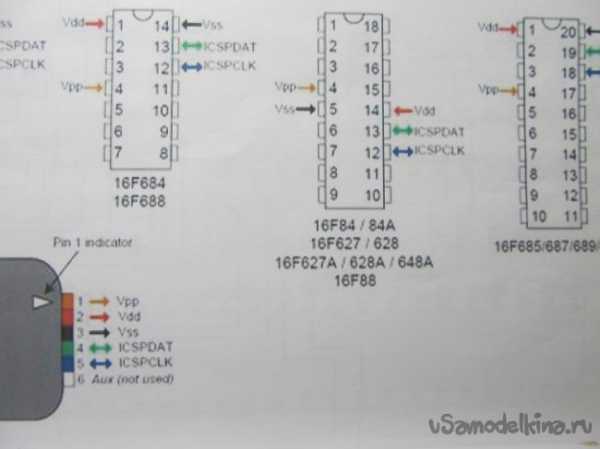
Когда все припаяно, хорошо все проверяем. Далее берем PIC16F628A, его нужно запрограммировать. Я использовал PIC KIT 2 lite и самодельную панельку

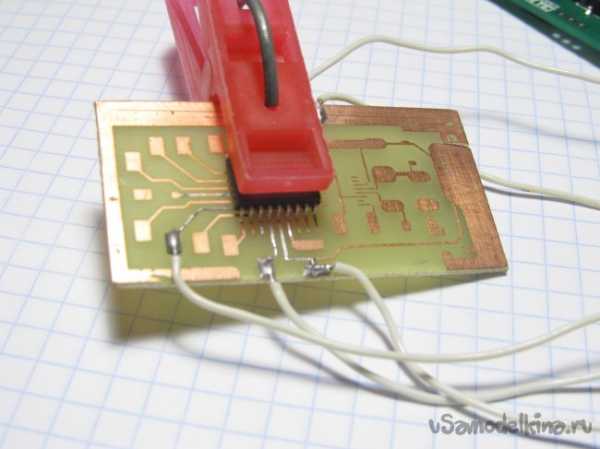
Вот схема подключения
Это все просто, так что не пугайтесь. Для тех кто далек от электроники, советую не начинать с SMD компонентов, а купить все в DIP размере. Я сам так делал в первый раз
И все это реально заработало с первого раза
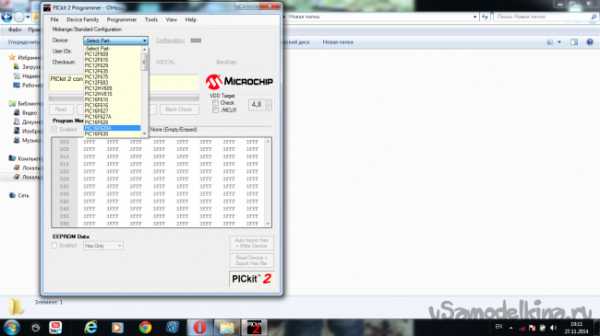
Открываем программу, выбираем наш микроконтроллер
Нажимаем вставить файл с прошивкой и нажимаем WRITE
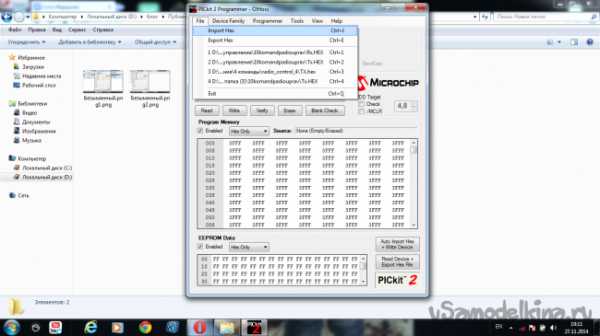
Аналогично делам и с другим микроконтроллером.

На схеме светодиоды стоят чисто для проверки работоспособности. Если у кого нету программатора тоже обращайтесь, помогу с уже прошитыми микросхемами.
С вопросами и предложениями обращаться на почту [email protected] или в комментариях.
Вот файлы с прошивкой Rx1.zip [1.46 Kb] (скачиваний: 3099)
Автор схемы:
 Доставка новых самоделок на почту
Доставка новых самоделок на почтуПолучайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.Как собрать машинку на пульте управления: пошаговая инструкция + рекомендации
Игрушками сейчас интересуются не только дети. Многие взрослые приобретают точные копии авто известных марок либо подыскивают радиоуправляемые модели машинок. Сред предложенного ассортимента игрушечных магазинов не всегда можно встретить вариант, который полностью устроит клиента. В некоторых случаях гораздо лучше смастерить радиоуправляемую модель машинки самостоятельно, ваш ребенок оценит ваши усилия. Презент, собранный своими руками из подручных средств, намного ценнее яркой машинки, купленной в дорогом игрушечном магазине.
Можно сделать самостоятельно машинку на радиоуправлении, применяя наш последовательный алгоритм. Моделирование из одной готовой модели машинки в другую очень схоже с действиями мастеров в автомастерской.
Требуемые материалы
Чтобы создать управляемую машинку своими руками, нужно иметь следующие элементы:
- Электромотор;
- Корпус маленького автомобиля;
- Прочное шасси;
- Съемные колеса;
- Комплект мини-отверток;
- Подробная инструкция к комплектующим.

Практическое руководство по сбору
Бесспорно, у самостоятельного сбора машинки на пульте имеется масса выигрышных преимуществ, а именно:
- Экономия средств, при этом вы будете иметь ту модель машинки, которую вы хотели;
- Вы можете сами выбрать нужную модель из предложенного ассортимента запчастей и разновидностей кузовов;
- Вы решаете – сделать мини-машинку на проводном пульте, либо воспользоваться радиоуправлением, на которое придется потратить большую сумму.
После того как вы определитесь с моделью, выполните следующий алгоритм действий:
- Подбираем шасси для своей модели, обратите внимание на качестве всех мелких деталей. Никаких вкраплений и зазубрин на поверхности пластика не должно быть видно, передние колеса должны двигаться плавно;
- При подборе колес особое внимание уделяйте моделям с резиной, поскольку полностью пластмассовые модели имеют сцепкую поверхность низкого качества;
- К выбору мотора подойдите со всей серьезностью, поскольку это главное сердце мини-машинки. Существуют 2 разновидности мини-моторчиков для машинок – электрические и бензиновые. Электрические моторы отличаются доступностью и простотой использования, они подпитываются от аккумулятора, ему очень легко давать новый заряд. Бензиновые варианты обладают большей мощностью, но они более дорогостоящие, требуют деликатного ухода. В них нужно вливать специальное топливо. Новичкам в сфере моделирования игрушечных машинок подойдут электромоторы;
- Нужно определиться с разновидностью управления – проводное либо беспроводное. Проводное управление стоит дешевле, но машинка будет двигаться только в ограниченном радиусе, в то время как радиоуправляемая модель будет двигаться в пределах досягаемости антенны. Радиоблок гораздо эффективнее для мини-машинок;
- Корпус будущей машины также заслуживает повышенного внимания. Вы можете выбрать готовый корпус либо сделать по личному эскизу.
После того как все детали куплены можно приступать к сборке.

Собираем вместе все комплектующие модели
К шасси крепим моторчик и радиоблок. Монтируем антенну. Вместе с комплектующими деталями должна идти подробная инструкция по сборке всей машинки. Налаживаем работу мотора. После того как все будет исправно функционировать, зафиксируйте прочный корпус мини-машинки на шасси. Теперь можно декорировать созданную модель по своему усмотрению. Смастерим машинку с мощным моторчиком.
Многие найдут идею собрать машинку с моторчиком для своего ребенка весьма странной, поскольку на прилавках магазинов есть множество готовых вариантов. Но если вы стремитесь проявить индивидуальность и заработать авторитет в глазах своего ребенка, то можно взяться за сборку машинки с моторчиком, хоть сделать это непросто, зато результат оправдает все усилия.
Поэтапная инструкция
Оптимальный вариант – заняться сборкой радиоуправляемой модели. Здесь потребуются определенные навыки и знания мелкой электротехники, ведь эта мини-машинка представляет собой достаточно сложный механизм, несмотря на компактные размеры. Необходимо приобрести все важные детали.
Начинаем изучать пульт управления. От правильной сборки напрямую зависит движение авто, способность преодоления препятствий, делать красивые маневры. Многие автомоделисты применяют трехканальный пульт пистолетного вида, собрать который можно самостоятельно.
Можно пойти по простому пути – обзавестись специальным конструктором, где в комплекте содержатся все необходимые детали, их подробные схемы и конечные рисунки готовых моделей.
Двигатели для будущих радиоуправляемых моделей могут быть электрическими либо внутреннего сгорания. Двигатели внутреннего сгорания выпускают бензиновые либо калильные, функционирующие на составе из метанола, масла и нитрометана, специальной газоспиртовой смеси. Примерные объемы таких двигателей колеблются в пределах от 15 до 35 см3.
Примерный объем топливного бака у таких машин составляет 700 см3. Он обеспечивает двигателю бесперебойную работу в течение 45 минут. Многие бензиновые модели имеют задний привод, на них монтируется независимая подвеска.
Сегодня в продаже имеется множество разборных моделей, предназначенных для автомоделистов. Среди ведущих производителей мини-машинок стоит выделить АВС, Protech, FG Modelsport (Германия), HPI, HIMOTO (США). Их главной особенностью является схожесть мини-моделей с реальными прототипами. После окончания сборки по приложенной инструкции установите заряженный бортовой аккумулятор, батарейку в передатчик, залейте в бак небольшое количество бензина. Вы можете смело запускать своего железного коня в путь.

Как собрать радиоуправляемый автомобиль Range Rover
Моделировать автомобили по собственному желанию – это увлекательное хобби, особенно, когда результат превышает все ожидания. Для начала нужно приобрести стендовую модель Range Rover, из нее мы будем делать джип, свободно рассекающий по бездорожью. Еще нужно взять рабочую электронику от старого джипа, ее мы будем фиксировать во внедорожник.
Из медных труб паяльником мастерим мосты и дифференциалы. Его мы крепим к мощным колесам внедорожника. Нужно следить за тем, чтобы все соединения были прочно запаяны. Закрыли мы точащие дифференциалы крышечками от таблеток. Сверху покрываем все место стыка дифференциала обычной автоэмалью. Ставим мосты на раму и выполняем рулевые тяги. Рулевые тяги можно взять у старой разобранной машинки. После установки пластикового дна вырезаем там отверстие, необходимое для установки редуктора, карданных валов. В редукторе стоит двигатель от самолетика, также достаточно мощный. Модель двигается не рывками, а плавно, это самое главное условие для таких моделей. Делать редуктор достаточно сложно, но тут можно проявить всю свою смекалку. Редуктор плотно зафиксируем к днищу, крепим днище к раме. Теперь идет установка электроники, амортизаторов, аккумулятора. В конце идет покраска корпуса авто, установка основных узлов, фары и многое другое. Краску наносим в 4 слоя для обычного пластика. Автор нашел оригинальное фото машины и сделал ее мини-копию в игрушечном варианте. Чтобы модель не боялась влаги, электронику он покрыл специальным составом. Для придания эффекта старины шкурил наружную поверхность машины после покраски. Действия аккумулятора в такой модели хватает на 25 минут непрерывного катания.

Радиоуправляемая машинка своими руками с минимальными затратами
Чтобы создать такую простую модель, нам потребуются следующий список мелких деталей:
- Микросхема для радиоуправляемой машины;
- Пульт управления;
- Элемент рулевого управления;
- Паяльник с припоем;
- Компактный электрический прибор;
- Аккумулятор с зарядным устройством.
Порядок действий при этом таков:
- Собираем нижнюю часть машины, то есть подвеску;
- С этой целью требуется прочная пластмассовая пластина, она будет основанием для этой модели;
- К ней крепится микросхема для радиоуправляемой машины, к ней припаяем проволоку, которая служит антенной;
- Припаиваем провода от электрического мотора;
- Провода аккумулятора фиксируем к правильным точкам микросхемы;
- Фиксируем колеса, взятые от простой детской машинки;
- Все детали можно закреплять, лишь бы не отвалились при использовании.
Крепим элементы рулевого управления, сделать это одним лишь клеем невозможно. Переднюю ось нужно замотать изолентой для более прочной фиксации. Крепим аккумулятор на микросхеме. Теперь машинка готова к испытаниям. Она обязательно должна функционировать. Управление такой машинки производится при помощи пульта. Следуя этой инструкции, можно легко сделать новую машинку на управлении. Если есть желание конструировать своими руками, то это руководство как никогда кстати. Сделанная своими руками игрушка радует гораздо больше, чем модель, купленная своими руками.

Как собрать отечественную модель радиоуправляемой машины
Чтобы собрать эту модель, нам потребуются следующие составляющие:
- Простая модель машинки любого производства;
- ВАЗОвские детали для открывания дверей, аккумулятор 12-вольтовый;
- Аппаратура для организации радиоуправления;
- Прочные аккумуляторы с зарядным устройствами;
- Радиатор;
- Электронно-измерительная аппаратура;
- Небольшой паяльник с припоем;
- Слесарные приспособления;
- Кусок резины для обеспечения усиления бампера.
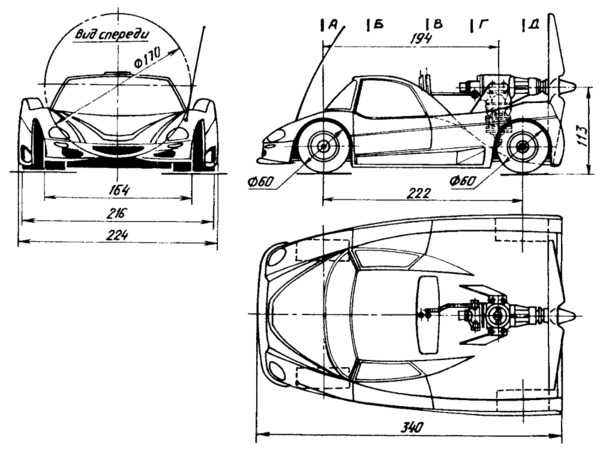
Примерная схема сбора радиоуправляемой модели покащана на рисунке.
Переходим к чтению и сбору схемы, к увлекательному процессу созданию уникальной мини-машинки. Сначала выполняем сбор подвески. Берем ВАЗовские соединения и шестеренки для сбора редуктора. На шпильках и корпусе нужно нарезать резьбу, чтобы навесить шестеренки и соленоиды. Подсоединяем редуктор к питанию, проверяем, после чего фиксируем на машинке. Чтобы эффективно защитить систему от перегрева, устанавливаем радиатор. Пластину от него можно прочно зафиксировать при помощи обычных болтиков. Далее идет установка микросхем силового драйвера и радиоуправления. Полностью устанавливаем корпус авто. Наша мини-машинка готова к настоящим испытаниям.

Ценная информация
У вас имеется машинка на радиоуправлении. Вы стремитесь сделать ее более маневренной, но не знаете, как это сделать?
Не перегружайте модель дополнительными системами и лишними мелкими деталями. Звуковые сигналы, светящиеся фары – это все удобства, они отлично смотрятся, но самостоятельный процесс сбора радиоуправляемой машинки и без этого имеет определенные сложности. Усложнение деталей может негативно сказаться на важных ходовых частях авто. Основной момент, на чем нужно заострить внимание, – это создание качественной подвески, обеспечение надежной передачи сигнала.
Для улучшения показателей маневренности и оптимизации скоростных параметров подойдет доводка системы во время тестовых заездов. Эти рекомендации помогут вникнуть в дело автомоделирования. Вы можете самостоятельно создать машинку, которая будет настоящей копией большой модели. Все детали у них будут схожими, только у вашего варианта все будет в мини-формате.

Обрадуйте сынишку – сделайте вместе с ним машинку на пульте управления
Можно начать с простого – собрать машинку-конструктор на пульте. Для начала нужно придумать проект: как будет выглядеть ваша машинка, как будет двигаться, просмотреть прочие детали. Чтобы начать незамедлительную сборку, нужно подготовить не только все важные составляющие компоненты будущего железного коня, но и необходимые приспособления. Чтобы начать увлекательное совместное занятие с сынулей, берем следующие вещи:
- Маленький моторчик, можно позаимствовать у старого вена либо бытового вентилятора;
- Прочную раму;
- Комплект мини-резины;
- Качественная подвеска для маленького шасси;
- 2 прочные оси для фиксации колес;
- Беспроводная антенна;
- Тонкие провода для соединений;
- Качественные батарейки для аккумулятора либо специальный бензин;
- Собранный приемник сигналов;
- Старый пульт управления, подойдет простой передатчик либо устаревший радиоблок.
Из приспособлений потребуются пассатижи, маленький паяльник, отвертки различного диаметра.
Порядок сборки
Во время процесса сборы может выясниться, что некоторые недостающие детали придется докупить либо позаимствовать у старых, поломанных машинок сынишки. Ведь он ими пожертвует ради крутой новинки, не правда ли?! Раму и кузов берем у старых образцов игрушек сына. Выбранный моторчик заранее тестируется на маневренность и работоспособность. Мощность движка не должна идти в разрез с весом машинки, ведь слабый мотор не потянет тяжеловесную конструкцию. Батарейки должны быть неиспользованными. Поэтапные действия при сборке таковы:
- Сначала собираем мини-раму;
- Затем фиксируем и регулируем исправный моторчик;
- Вводим батарейки либо компактный аккумулятор;
- Далее фиксируется антенна;
- Колеса монтируют так, чтобы они могли свободно поворачивать, крутясь вместе с осью. Если это условие не будет исполнено, машинка будет двигаться лишь вперед и назад.
Для будущего железного коня лучше взять резиновые шины, поскольку они лучше всего проявляют себя на открытом грунте. Если процесс сборки был достаточно легким, вы смогли разобраться во всех тонкостях первичного автомоделирования, то можно смастерить несколько образцов, можно еще один экземпляр подарить соседскому мальчишке. Они будут устраивать гонки по открытому грунту на улице.
Ценные рекомендации
Сборка новой уникальной машинки – увлекательный процесс, за которым могут провести не один вечер папа и сынишка. Чтобы превратить его в продуктивное дело, можно последовать следующим рекомендациям, их нужно учесть при сборке современной игрушки:
- Сделайте эскиз будущей модели, которую вы хотите собрать либо воспользуйтесь готовой инструкцией по сбору;
- Приобретите все качественные детали машинки;
- Дополнительные детали можно взять у старых машинок либо приобрести новые;
- Перед установкой тщательно протестируйте выбранный моторчик, это сердце машинки;
- Не экономьте на батарейках для новой модели, пусть они будут новыми и неиспользованными;
- Прочно фиксируйте все детали, согласно их последовательности;
- Изучите схемы создания аналогичных машинок заранее, чтобы облегчить процесс сборки;
- Выберите готовую модель либо придумайте что-то свое, уникальное.
Следуя этим рекомендациям, вы со своим чадом легко смастерите выбранную модель машинки. Можно мастерить и коллекционировать точные копии оригинальных авто, когда вы достигнете определенного уровня мастерства. Собирать вместе машинку в семейном кругу, – вот наилучший способ эффективной организации досуга для себя и своего ребенка.
Машинка, собранная своими руками, будет ценным презентом для своих детей, ведь в нее вложены настоящие отцовские чувства. В собранном виде модель будет ездить в выбранном направлении и легко маневрировать. Вы сможете научиться делать простой вариант машинки, следуя рекомендациям из предложенного видео. Начните свой путь в мире автомоделирования!
Если понравилась статья, поделись с ней:www.nuemoe.ru
Делаем радиоуправление для самолета / Habr

Прочитав этот пост загорелся и я идеей склепать свой самолетик. Взял готовые чертежи, заказал у китайцев моторчики, аккумуляторы и пропеллеры. А вот радиоуправление решил сделать самостоятельно, во-первых — так интереснее, во-вторых — надо себя чем-то занять пока посылка с остальными запчастями будет ехать, ну и в третьих — появилась возможность соригинальничать и добавить всяких плюшек.
Осторожно, картинки!
Как и чем управлять
Нормальные люди берут приемник, втыкают в него сервомашинки, регулятор скорости, двигают рычажки на пульте и радуются жизни не задаваясь принципами работы и не углубляясь в подробности. В нашем случае такое не пройдет. Первой задачей стало узнать каким макаром управляются сервомашинки. Все оказывается достаточно просто, у привода есть три провода: + питания, — питания и сигнальный. На сигнальном проводе прямоугольные импульсы изменяемой скважности. Чтобы понять что это такое смотрим картинку:
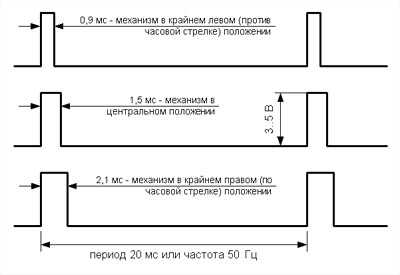
Итак, если мы хотим установить привод в крайнее левое положение нужно слать импульсы длительностью 0,9мс с интервалом 20мс, если в крайнее правое — длительность 2,1мс, интервал тот же, ну со средними положениями аналогично. Как оказалось, регуляторы скорости управляются аналогично. Те, кто в теме скажут что это обычный ШИМ, который реализовать на любом микроконтроллере — плевое дело. Вот и я так решил, купил в местном магазине сервомашинку и склепал на макетке для нее так называемый сервотестер на ATtiny13. И тут оказалось, что ШИМ не совсем простой, а с подводными камнями. Как видно из вышеприведенной диаграммы, скважность (отношение длительности импульса к длительности периода) от 5% до 10% (в дальнейшем я за крайние положения принимаю импульсы длительностью 1,0мс и 2,0мс) для 256-значного ШИМ счетчика ATtiny13 это соответствует значениям от 25 до 50. Но это при условии, что на заполнение счетчика уйдет 20мс, а на деле так не получится и для частоты 9,6МГц и предделителя 1024 нужно ограничить счетчик значением 187(ТОР), в таком случае у нас получится частота 50,134Гц. В большинстве (если не во всех) сервомашинок нету точного генератора опорной частоты и поэтому частота управляющего сигнала может немного плавать. Если оставить ТОР счетчика 255, то частота управляющего сигнала будет 36,76Гц — на некоторых приводах оно будет работать (возможно с глюками), но далеко не на всех. Итак, теперь у нас 187-значный счетчик, для него 5-10% соответствуют значениям от 10 до 20 — всего 10 значений, немного дискретно получится. Если думаете поиграть с тактовой частотой и предделителем ниже привожу сравнительную табличку для 8-битного ШИМа:

Но ведь у большинства микроконтроллеров есть 16-битный (и больше) таймер для генерации ШИМ. Здесь проблема с дискретностью сразу пропадет еще и частоту можно точно выставить. Долго расписывать не буду, сразу даю табличку:
Я не думаю, что для китайской сервомашинки есть существенная разница в 600 и 1200 значений, поэтому вопрос с точностью позиционирования можно считать закрытым.
Многоканальное управление
С одной сервомашинкой разобрались, но для самолета их нужно минимум три и еще регулятор скорости. Решение «в лоб» — взять микроконтроллер с четырьмя каналами 16-битного ШИМ, но такой контроллер будет стоять дорого и, скорее всего, займет много места на плате. Второй вариант — запилить программный ШИМ, но занимать процессорное время — это тоже не вариант. Если снова посмотреть на диаграммы сигнала, то 80% времени он не несет никакой информации, поэтому рациональнее было бы ШИМом задавать только сам импульс 1-2мс. Почему скважность изменяется в таких узких пределах, ведь проще было бы и формировать и считывать импульсы со скважностью хотя бы 10-90%? Зачем нужен тот неинформативный кусок сигнала занимающий 80% времени? Я заподозрил, что, возможно, эти 80% могут занимать импульсы для других исполнительных механизмов, а потом этот сигнал разделяется на несколько разных. То есть, в периоде длительностью 20мс могут уместится 10 импульсов длительностью 1-2мс, затем этот сигнал каким-то демультиплексором разделяется на 10 различных с длительностью периода как раз 20мс. Сказано — сделано, нарисовал в PROTEUS такую схемку:
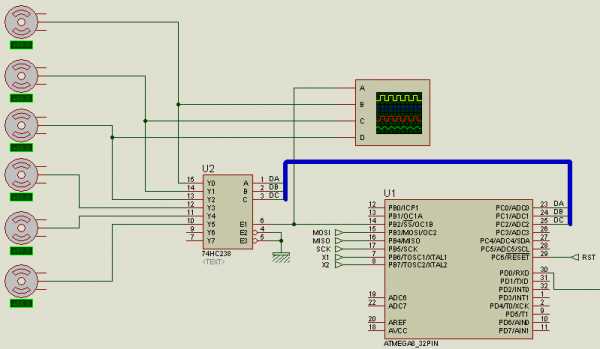
В роли демультиплексора — 74HC238, на его вход E подаются импульсы с выхода микроконтроллера. Эти импульсы — ШИМ с периодом 2мс (500Гц) и скважностью 50-100%. У каждого импульса своя скважность, обозначающая состояние каждого канала. Вот так выглядит сигнал на входе Е:
Для того, чтобы 74HC238 знал на какой выход подать текущий сигнал используем PORTC микроконтроллера и входы A, B, C демультиплексора. В результате на выходах получаем такие сигналы:
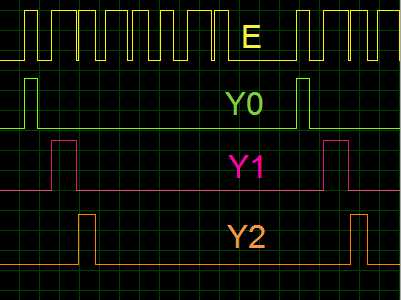
Сигналы на выходе получаются правильной частоты (50Гц) и скважности (5-10%). Итак, нужно генерировать ШИМ частотой 500Гц и заполнением 50-100%, вот табличка для настройки предделителя и ТОР 16-битного счетчика:

Интересно, что возможное количество значений ШИМа ровно в 1000 раз меньше частоты таймера.
Программная реализация
Для ATmega8 с тактовой частотой 16МГц в AtmelStudio6 все реализуется следующим образом: вначале задефайним значения счетчика для крайних положений сервомашинок:
#define LOW 16000U
#define HIGH 32000U
затем инициализируем генератор ШИМа на таймере/счетчике1:
OCR1A = HIGH; //Устанавливаем ТОР
TCCR1A = 0<<COM1A1 | 0<<COM1A0 | 1<<COM1B1 | 0<<COM1B0 | 0<<FOC1A | 0<<FOC1B | 1<<WGM11 | 1<<WGM10; //Запускаем неинвертированный Fast PWM на выходе OC1B с верхним значением счетчика, которое записанно в OCR1A
TCCR1B = 0<<ICNC1 | 0<<ICES1 | 1<<WGM13 | 1<<WGM12 | 0<<CS12 | 0<<CS11 | 1<<CS10; //предделитель 1
TIMSK = 1<<OCIE1A | 1<<OCIE1B | 0<<TOIE1; //Разрешаем прерывания по совпадению
Остается реализовать прерывания:
ISR(TIMER1_COMPA_vect) //прерывание по достижению верхнего значения счетчика, непосредственно перед началом следующего импульса
{
//c_num- переменная, обозначающая номер текущего канала, channels - массив значений каналов
if (c_num <= 7)
{
OCR1B = channels[c_num];
}
else
{
OCR1B = 0; //отключаем ШИМогенератор для несуществующих в демультиплексоре 8 и 9 канала
}
}
ISR(TIMER1_COMPB_vect, ISR_NOBLOCK)// прерывание возникающее в конце импульса
{
if (c_num <= 7)
{
PORTC = c_num; //для каналов 0-7 выводим номер канала на PORTC
}
//и изменяем значение счетчика от 0 до 9
if (c_num >= 9)
{
c_num = 0;
}
else
{
c_num++;
}
}
Глобально разрешаем прерывания и готово, забивая в channels значения от LOW до HIGH изменяем значения на каналах.
Реализация в железе
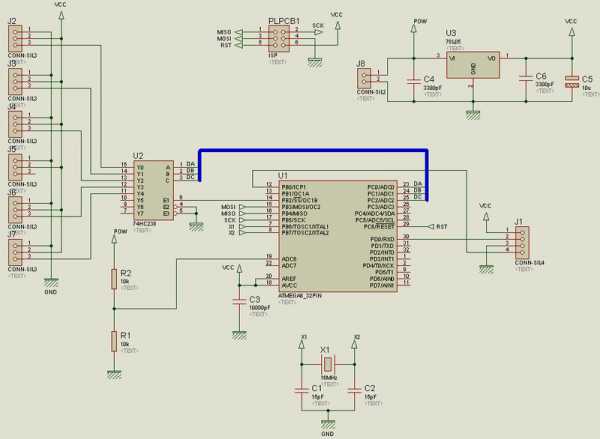
Ну с теорией разобрались, пришло время все это реализовать. Мозгом системы выбран микроконтроллер ATmega8A, тактируется от кварца на 16МГц (не потому, что я захотел 16000 позиций сервомашинки, а потому, что у меня такие валялись). Управляющий сигнал для МК будет поступать через UART. В результате получилась вот такая схемка:
Спустя некоторое время появилась вот такая платка:

Два трехштыревых разъема я не припаял потому, что они мне не нужны, а не подряд они впаяны поскольку у меня нету металлизации отверстий, а в нижнем разъеме дорожки с двух сторон, можно было бы заменить проволочкой, но программно нету проблемы выводить сигнал на любой разъем. Также отсутствует 78L05 ибо в моем регуляторе двигателя есть встроенный стабилизатор (ВЕС).
Для получения данных к плате подключается радиомодуль HM-R868:
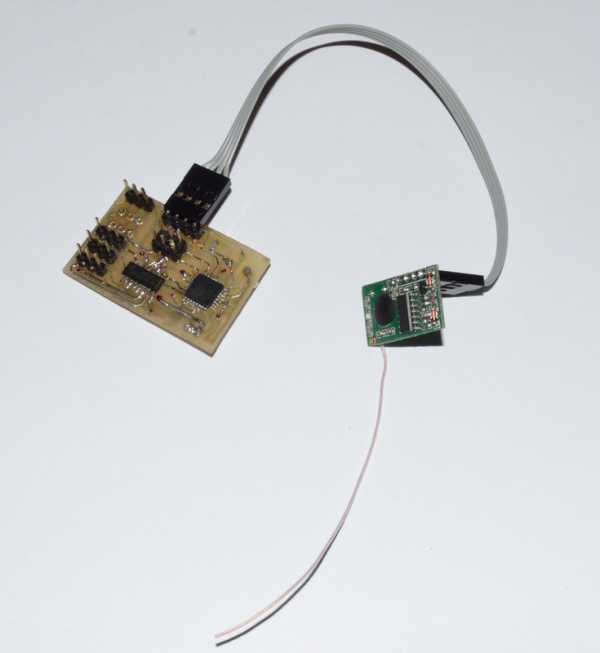
Изначально думал втыкать его прямо в плату, но эта конструкция не помещалась в самолетик, пришлось сделать через шлейф. Если изменить прошивку, то контакты разъема для программирования можно использовать для включения/отключения каких-нибудь системам (бортовые огни и т.п.)
Плата обошлась примерно в 20грн = $2.50, приемник — 30грн = $3,75.
Передающая часть
Самолетная часть есть, осталось разобраться с наземной аппаратурой. Как уже писалось ранее, данные передаются по UART, на каждый канал по одному байту. Вначале подключал свою систему проводом через переходник к компьютеру и команды слал через терминал. Чтобы дешифратор определял начало посылки, а в будущем выделял посылки адресуемые именно ему, вначале шлется байт-идентификатор, затем 8 байт определяющих состояние каналов. Позже стал использовать радиомодули, при отключении передатчика все моторчики начинали дико дергаться. Дабы отфильтровать сигнал от шумов, десятым байтом шлю XOR всех 9 предыдущих байт. Помогло, но слабо, добавил еще проверку на таймаут между байтами, если он превышается — вся посылка игнорится и прием начинается заново, с ожидания байта-идентификатора. С добавлением контрольной суммы в виде XOR слать команды с терминала стало напряжным, поэтому я побыстрому наклепал вот такую программку с ползунками:
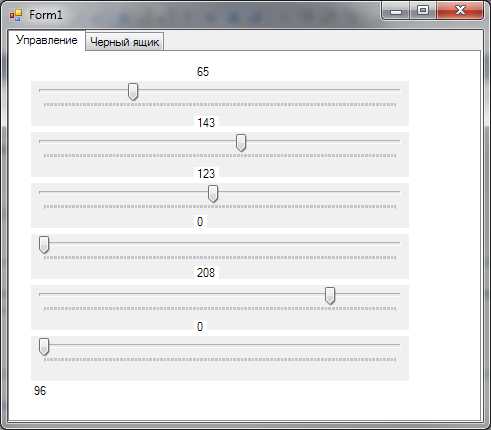
Число в нижнем левом углу — контрольная сумма. Передвигая ползунки на компе двигались рули на самолете! Вообщем отладил я все это и стал думать о пульте ДУ, купил для него вот такие джойстики:
Но потом меня посетила одна мысль. В свое время я тащился от всяких авиасимуляторов: «Ил-2 Штурмовик», «Lock On», «MSFSX», «Ка-50 Черная Акула» и др. Соответственно был у меня джойстик Genius F-23 и решил я прикрутить его к вышеописанной проге с ползунками. Погуглил как это реализовать, нашел этот пост и получилось! Управлять самолетиком с помощью полноценного джойстика, мне кажется, гораздо круче, чем маленькой палочкой на пульте. Вообщем все вместе изображено на первой фотке — это нетбук, джойстик, преобразователь на FT232, и подключенный к нему передатчик HM-T868. Преобразователь подключается 2м кабелем от принтера, что позволяет закрепить его на каком нибудь дереве или чем-то подобном.
Пуск!
Итак, есть самолетик, есть радиоуправление — Поехали!(с) Первый полет производился над асфальтом, результат — сломанный пополам фюзеляж и полувырванный двигатель. Второй полет производился над более мягкой поверхностью:
Последующие полетов 10 были тоже не особо удачными. Основной причиной я считаю сильную дискретность джойстика — по крену он выдавал только 16 значений (вместо возможных 256), с осью тангажа — не лучше. Но так как в результате испытаний самолет был значительно поврежден и не подлежит ремонту:

— проверить правдивость этой версии пока не представляется возможным. В пользу этой версии говорит и зафиксированная на видео попытка выровнять самолет — он летит накрененным, а потом резко заваливается в противоположную сторону (а должен плавно). Вот более наглядное видео:
Дальность действия аппаратуры — примерно 80м, дальше тоже ловит, но через раз.
Ну вот и все, благодарю за внимание. Надеюсь, приведенная информация окажется для кого-то полезной. Буду рад ответить на все вопросы.
В архиве схема и разводка платы для Протеуса.
habr.com
Пульт радиоуправления моделями своими руками / Habr

Всем привет. Представляю на общее обозрение самодельный пульт радиоуправления для управления различными объектами на расстоянии. Это может быть машинка, танк, катер и т.д. изготовленное мной для “детского” радио кружка. С применением радио модуля NRF24L01 и микроконтроллера ATMEGA16.
Давно у меня лежала коробка одинаковых поломанных игровых джойстиков от приставок. Досталась от игрового заведения. Особого применения в неисправных игровых джойстиках я не видел, да и выкидывать или разбирать жалко. Вот и стояла коробка мертвым грузом пылилась. Идея применения игровых джойстиков, пришла, как только пообщался со своим приятелем. Приятель вел кружок для юных радиолюбителей в интернате, причем бесплатно по выходным, приобщал любознательных детишек к миру радиоэлектроники. Дети они ведь как губка, впитывают информацию. Так как я сам очень приветствую подобные кружки для детей, а тут еще и в таком месте. То и предложил идею, как задействовать нерабочие джойстики. Идея заключалась в следующем: создать самодельный радио дистанционный пульт управления моделями, собранными своими руками, который хотелось бы предложить детям для изучения проекта. Идея ему очень понравилась, учитывая, что финансирование детских учреждений мягко сказать не очень, да и мне был интересен данный проект. Пускай я тоже внесу свою лепту в развитие радио кружка.
Цель проекта создать законченное устройство не только как радио дистанционный пульт, но и ответную часть на радиоуправляемый объект. Учитывая, что пульт для детей то и подключение приёмной части на модель, также должно быть по возможности простым.
Сборка и комплектующие:

Разобрав игровой джойстик на составляющие, сразу стало ясно, нужно изготовить новую печатную плату, причем, весьма необычной формы. Сначала, хотел развести печатную плату на микроконтроллер ATMEGA48, но как оказалось портов микроконтроллера просто не хватает под все кнопки. Конечно, такое количество кнопок в принципе не нужно и можно было ограничиться только четырьмя портами микроконтроллера АЦП для двух джойстиков и два порта для тактовых кнопок, размещенных на джойстиках. Но мне захотелось по возможности максимально большое количество кнопок задействовать, кто знает, чего там детишки ещё захотят добавить. Так была рождена печатная плата под микроконтроллер ATMEGA16. Сами микроконтроллеры у меня были в наличии, остались от какого-то проекта.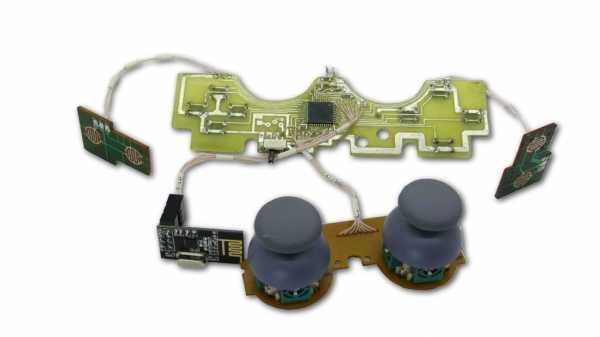
Резинки на кнопках очень сильно были изношены, и восстановлению не подлежали. Но это не удивительно учитывая, где джойстики использовались. По этой причине применил тактовые кнопки. Пожалуй, к минусам тактовых кнопок можно отнести сильное щелканье, возникавшие в результате нажатия на кнопку. Но для данного проекта это весьма терпимо.
Плату с джойстиками не пришлось переделывать, оставил какая есть, что значительно сэкономило времени. Торцевые кнопки также сохранил в первоначальном виде.
В качестве приемопередатчика выбрал радиомодуль NRF24L01, так как цена весьма мала в Китае по цене 0.60$ за шт. купил. Несмотря на свою малую стоимость, радиомодуль обладает не малыми возможностями и конечно мне подходил. Следующей проблемой, с которой столкнулся, а собственно где радиомодуль разместить. Пространство в корпусе свободного маловато, по этой причине радио модуль разместил в одной из ручек корпуса джойстика. Даже фиксировать не пришлось, модуль плотно прижимался, когда собирался полностью корпус.

Пожалуй, самой большой проблемой стал вопрос с питанием для радио пульта. Покупка каких-то специализированных аккумуляторов, скажем литиевых, влетало в немалую копеечку, так как собирать решено было семь комплектов. Да и оставшееся свободное пространство в корпусе не очень позволяло использовать стандартные аккумуляторы серии AA. Хотя потребление и не значительное можно использовать разные подходящие источники питания. Как всегда, на помощь пришла дружба, коллега на работе подогнал аккумуляторы литиевые плоские от мобильных телефонов и бонусом зарядки к ним. Все же немного пришлось переделать их, но это незначительно и гораздо лучше, чем делать с нуля зарядку для аккумуляторов. Вот на плоских литиевых аккумуляторах я и остановился.
В процессе испытания радио модуль, свою заявленную дальность оправдал и уверенно работал по прямой видимости на расстоянии 50 метров, через стены дальность значительно уменьшилась. Также было в планах установить вибромотор, который реагировал, скажем на какие-то столкновения или другие действия в радиоуправляемой модели. В связи с этим предусмотрел на печатной плате транзисторный ключ для управления. Но дополнительные усложнения я оставил на потом сначала нужно обкатать программу, так как она ещё сыровата. Да и конструкция, учитывая, что это прототип требует мелких доработок. Вот так как говорится “с миру по нитке”, практически с минимальными вложениями был создан пульт радиоуправление.
Печатная плата — atmel-programme.clan.su/pultdzhostik.rar
Радиомодули брал тут — alipromo.com/redirect/cpa/o/rhc8f0n1hlzfodwgihmb8nwr9wx53k5g
habr.com
Простейшее радиоуправление. Специально для начинающих.
Простейшее радиоуправление. Специально для начинающих.
Решил сделать схемы которые делал в детстве и они у меня не получились и описать свои ошибки. Тогда я никак не мог понять почему я передатчиком посылаю одни команды, а приемником если и принимаю, со совсем что то непохожее. Сейчас я конечно знаю почему у меня так получалось, но в виду излишка свободного времени решил все это сделать в железе как тогда в детстве. Ностальгия наверное. Для начала взял самые простейшие схемы, Тем более форум просто забит вопросами «Как сделать радиоуправление на одну команду».
Когда начинал писать, то думал, что постепенно дойду и до сложных постепенно усложняя приемную и передающую часть., т.к. в каждом конкретном случае возникают проблемы совершенно разные. К примеру вместо сверхрегенератора применить для радиоуправления простую и дешевую микросхему TDA7000 или TDA7021.
Подход в этом случае будет немного другой, т.к. там будут действовать другие дестабилизирующие факторы. Конечно для профессионалов эта идея покажется смешной, но для начинающих в качестве первой конструкции по моему самое то и поняв общие принципы можно уже с понятием делать на специализированных микросхемах.
На TDA7000(70221) по моему и схема и настройка будет еще проще. В ней, при её простоте заложено довольно много возможностей для целей радиоуправления.
К сожалению статья моя раздулась до безобразия, а я успел только про примитивные сверхрегенераторы на 27 мгц написать, поэтому я ими и закончил
Понятно подходы выделения полезного сигнала при радиоуправлении различны для разных приемных и передающих систем. У каждой системы есть свои особенности.
Даже если взять тот же сверхрегенератор, но частоту взять раз в десять больше, то одно проблемы отпадут, но появятся новые.
К сожалению в этой статье до этого не дошел, хотя сам передатчик и приемник сверхрегенератор на частоту 225 мгц сделал.
На этих частотах обработка сигнала и его выделение проще, но труднее сама аппаратура, но при этом открываются большие возможности в конструировании малогабаритной аппаратуры радиоуправления на большие расстояния..
Вот даже моя примитивная система на 225 мгц работает в пределах квартиры без всяких антенн. Частоту взял именно эту просто из за того, что вытащил кварц на 25 мгц из старой сетевой карточки и сделал на его основе передатчик. Справа там просто мультивибратор на логике, что бы сигнал передатчика промодулировать.
А это приемник сверхрегенератор на частоту 225 мгц.
Монтаж на пятачках. Считаю, что для макетов идеальный способ. Расположение пятачком делается в процессе монтажа и заранее неизвестно. Прочитать об этом способе можно в книге С.Г. Жутяев «Любительская УКВ радиостанция»
https://www.cqham.ru/ftp/1-29.djvu
С этим все. Начинаю со сверхрегенераторами на 27 мгц, а там как получится.
Понятно, что сначала нужно было сделать простейший маломощный передатчик – маячек для моих экспериментов. Схему сделал для данных целей самую примитивную. Сделал на трех транзисторах. Генератор на 27 мгц и мультивибратор на микросхеме. В дальнейшем этот мультивибратор для однокомандной апппаратуры будет лишний. Его приделал только для настройки. Питание 4,5 вольта.
Как говорил, схема сверхрегенератора классическая. Катушка такая же, как и в передатчике. Транзистор КТ315Б
Подключил к УНЧ и антенну длиной 15 см. Покрутил R2 и добился шумов суперизации.
Взял книжку книжку Г. Миль «Электронное дистанционное управление моделями» Подцепил осциллограф к точке «1» на схеме и как подозревал картинка моя было и близко на эту не похожа.
Что я только не крутил, но они форму менять не хотели или их уровень поднимался выше от нулевой линии, что тоже уменьшало чувствительность.
Дроссель в эмиттере у меня был самодельный. Намотано 50 витков провода на резисторе 100 ком. От отчаяния взял и поставил фабричный дроссель ДПМ-01 и произошло чудо. Осциллограмма сразу приняла приличный вид и чувствительность улучшилась.
Стал экспериментировать с самодельными дросселями. Во всяком случае на 27 мгц наиболее близким к этому оказался намотанный на ферритовом кольце дроссель диаметром 10 мм. Витков 35. Тип феррита не знаю. Взял случайный. Дальше эксперименты прекратил, но понял, что дроссель в сверхрегенераторе очень важная часть и никогда его не нужно как иногда рекомендуют мотать просто на резисторе.
Настала пока делать однокомандную управление. В теории все просто выглядит. Когда несущей нет, то сверхрегенератор сильно шумит. Этот шум нудно выпрямить и использовать как команду. Если подать просто несущую, т.е. включить передатчик без модуляции, то эти шумы пропадают. После детектора получается ноль, а это равносильно подаче команды. Эта система привлекает тем, что когда передатчик отключен, то на выходе приемника нет ложных команд. Шумит он и шумит.
Вот и у Г. Миля об этом написано.
Такая привлекательная простая схема. Жалко, что на практике она очень нестабильно работает. Так и у меня в те годы получилось и решил я её добить. Может кому пригодится. Дело в том, что на выходе сверхрегенератора присутствует переменное напряжение суперизации, как видели оно порядка единиц вольт, хотя и частота у него намного больше напряжения шумов, но величина шумов всего лишь несколько милливольт и эффективно отделить их очень затруднительно. Конечно идеальный случай поставить НЧ трансформатор или ФНЧ на LС элементах, но лень мотать тысячи витков. Хотя в давние времена люди были не такие ленивые и мотали такое.
Здесь нужно заметить, что если сверхрегенератор использовать для приема голоса, то сильное подавление частоты суперизации можно не делать. Просто не нужно будет подавать на УНЧ сильный сигнал, что бы не загонять его в режим отсечки этим напряжением суперизации. В нашем случае это напряжение нужно убрать как можно сильнее. На выходе сверхрегенератора стоит примитивный фильтр НЧ на R5, С7 но все, на что он способен, так получить на его выходе вот такое с амплитудой порядка 0,2 вольта, а шумов при таком на экране осциллографа еще и не видим, хотя они там точно есть. Амплитуда этих шумов совсем мала. Это картинка в точке «2»
Если присмотреться, то наши шумы чуть видны в верхней части этих импульсов.
При таком безобразии приемник будет реагировать не на шумы, а на эти импульсы.
Т.к. ни LC фильтр мне не хочется, ни трансформатор ставить, то остается единственны путь, это поставить активный RС фильтр с частотой среза в несколько килогерц.
Взял опять на транзисторе. После фильтра поставил усилитель с маленьким выходным сопротивлением и получил основной блок для дальнейших экспериментов.
Если теперь посмотреть сигнал в точке «3» при отсутствии несущей, то видим только шум сверхрегенератора приличной амплитуды. Он то и является в нашем случае сигналом команды.
Кстати макет базового блока так выглядит. Виден монтаж на пятачках. Конструкция довольно жесткая. Можно спокойно её бросать и ничего с ней не будет. Все сделано на выводах деталей обрезанных до размера 1 – 2 мм
Единственно желательно сердечник катушки закрепить.
Теперь имея базовый блок делаем для начала простейшее однокомандное управление.
Принцип простой. Шумы уже выделили. Теперь их усилим, продетектируем, подадим на триггер Шмита и дальше на силовой ключ. Если передатчик не включен, то светодиод горит. При включении передатчика шумы пропадают и светодиод гаснет. Если нужно другая логика, то нужно добавить еще один ключ или вместо светодиода поставить реле, но это уже нюансы.
Это макет однокомандного управления так выглядит.
Передатчик для него до безобразия просто выглядит. Просто генератор на кварце 9 мгц работающий на третьей механической гармонике. Его просто включают или выключают.
В принципе можно сделать и без кварца. Для увеличения мощности в генераторе поставил два транзистора КТ315 в параллель, что тоже необязательно. Можно один или что то мощнее, например КТ603 или КТ3117
А это полная схема. Вверху базовый блок, снизу дешифратор команды.
Деталей получилось довольно много, но это компенсируется простотой и наглядностью настройки, где каждый каскад выполняет одну определенную функцию.
Теперь, как и задумал элементарные принципы передачи нескольких команд. Я взял две команды, хотя по этому принципу можно сделать порядка четырех.
Принцип частотного разделения каналов. Принцип широко известен. Правда для разделения каналов в аналоговых системах обычно применяют избирательные LС фильтры, но это не для ленивых, а коты как известно здорово ленивые.
Вот здесь схема с катушками из книги Г. Миля.
Поэтому фильтры решил взять активные на RС. Схем много перепробовал, но не понравились. Больше понравился фильтр Мюллера Фогта. О нем тоже в книге Г. Миля написано.
Базовый блок прежний, только после него вместо усилителя и триггера Шмита пришлось поставить усилитель-ограничитель, т.к. случались ложные срабатывания когда передатчик расположен близко от приемника. Было одновременное срабатывание двух соседних каналов. Когда поставил ограничитель и ограничил величину сигнала поступающих на фильтры, этот дефект пропал.
И наконец полная схема вместе с фильтрами и выходными ключами. Частоты я брал случайные. Первая получилась 1200 гц, вторая 750 гц. Желательно, что бы они не делились на целое число и не создавали в тракте гармоники, т.е. выбор 1200 гц и 600 гц был бы совсем не удачен в данном случае.
Само собой схемы фильтров можно взять и другие, но мне эти понравились.
А это внешний вид макета.
Теперь к передатчику можно переходить. Схема стандартная. Задающий генератор на кварце 9 мгц. Кварц работает на третьей механической гармонике. Дальше идет апериодический буферный каскад в котором происходит также модуляция. Подобная схема модуляции позволяет сделать большую скорость передачи, хотя требует дополнительного каскада. Выходной каскад самый примитивный. Если в нем предусмотреть цепи согласования с антенной, то параметры его конечно улучшаться. Так же можно в оконечном каскаде поставить и более мощный транзистор, хотя бы КТ603, но у меня не было этих целей. Я начал антенну согласовывать, но бросил, т.к. дальности для моих экспериментов и так хватало, а так при желании мощность его можно существенно увеличить особо не раздувая габаритов.
Модулятор по сути два мультивибратора работающих на разных частотах.
На схеме все понятно. Включаем или один мультивибратор или другой.
Там резистор R17 можно подобрать для увеличения мощности, но я не стал. Мне большая мощность не нужна была для экспериментов.
А это макет передатчика с которым я экспериментировал. Система само собой полностью работоспособная. Там видна спиральная антенна и удлиняющая катушка. Окончательно я её не настроил, т.к. большой дальности не преследовал на данном этапе своих экспериментов.
Все!
Силы мои иссякли, да и по опыту знаю, что чем длиннее статья, тем меньше охотников дочитать её до конца. Хотел сделать еще дистанционный аналоговый термометр, но выдохся. Просто на входе модуляции передатчика поставить генератор управляемый напряжением, а в качестве дешифратора приемника поставить преобразователь частота-напряжение. Такие ставили в аналоговых частотомерах.
В заключение хочу сказать, что конечно вместо примитивных шифраторов и дешифраторов на транзисторах здесь можно поставить более совершенные шифраторы и дешифраторы на логике или на МК в которых предусмотреть дополнительно свою систему зашиты достоверности информации дополнительно к этой, хотя не вижу смысла делать такое к таким примитивным передатчикам и приемникам.
Файлы:
11.png
Все вопросы в Форум.
www.radiokot.ru
картонный гоночный болид на электроуправлении своими руками
Радиоуправляемые игрушки можно увидеть в руках каждого ребенка. Магазины переполнены разнообразными гаджетами и самым интересным на сегодняшний день будет собрать машинку на радиоуправлении своими руками.

В этой инструкции я хочу показать вам, как сделать машинку на радиоуправлении своими руками. Вместо изготовления простой радиоуправляемой машинки, мы будем собирать картонную гоночную машинку F1. Картон общедоступен и делает возможным каждому собрать такую машинку прямо дома.
Все материалы для изготовления машинки легкодоступны каждому, также в статье есть ссылки для покупки деталей онлайн.
Шаг 1: Смотрим видео
Видео — замечательная вещь, позволяющая глубоко вникнуть в особенности и понять процесс изготовления. Но я также рекомендую просмотреть все шаги инструкции для изучения дополнительных сведений и картинок.
Шаг 2: Детали
- Высокоскоростной DC моторчик (Ebay или Amazon)
- DC моторчик с шестерёнкой (Ebay или Amazon)
- Модуль TP4056 (Ebay или Amazon)
- Литий-ионный аккумулятор (Ebay или Amazon)
- Выключатель (Ebay или Amazon)
- Пластиковые шестерёнки (Ebay или Amazon)
- Подшипник (Ebay или Amazon)
- Палочка от мороженого (Ebay или Amazon)
- Пистолет для горячего клея (Ebay или Amazon)
- Канцелярский нож (Ebay или Amazon)
В местных магазинах купите: картон, деревянные палочки, зубочистки, плату для схемы Rx Tx и провода.
Заметка: схема, которую я использовал, была добыта из старой сломанной радиоуправляемой машинки.
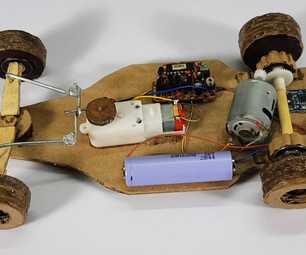
Шаг 3: Изготавливаем основу и заднюю ось
- Отрежьте кусок картона примерно 10*25 см
- Основываясь на картинке сверху, вырежьте основу для машинки F1
- Вырежьте деревянную палочку длиной 10см и сделайте на ней три отметки, как показано на картинке
- Возьмите пластиковую шестерёнку и просверлите отверстие, равное диаметру деревянной палочки
- Закрепите шестерёнку на второй отметке и приклейте её суперклеем
- Закрепите подшипники на остальных двух отметках и также закрепите их суперклеем
Заметка: Для увеличения диаметра палочки можно использовать изоленту.
Шаг 4: Изготавливаем самодельный рулевой механизм
- Вырежьте несколько кружков из картона и сложите их один на другой.
- Просверлите отверстие в их центрах и закрепите там зубочистку.
- Поместите круглую картонку с зубочисткой в нос основы машинки, как показано на картинке.
- Вставьте еще один кусочек картона поверх зубочистки и закрепите его суперклеем, так чтобы он мог свободно вращаться.
- Возьмите кусочек толстой стальной проволоки (как с настенного календаря) и согните её под углом 90° на расстоянии примерно 2,5 см.
- Вырежьте деревянную палочку и сделайте отверстие в её центре при помощи мини-дрели.
- Вставьте толстую проволоку в отверстие и закрепите её суперклеем.
- Вырежьте несколько кусочков из палочки от мороженого, как показано на рисунке, и сделайте в них отверстия примерно на 3/4 от центральной точки.
- Соберите части вместе и закрепите их на основе машинки, как показано на картинке.
Заметка: обязательно посмотрите видео, чтобы избежать ошибок.
Шаг 5: Изготавливаем картонные колёса
- Нарисуйте на картоне три круга примерно 4 см в диаметре.
- Поместите подшипник в центр круга и обведите вокруг него круг.
- На одном из кругов нарисуйте несколько спиц.
- Вырежьте кружочки и положите один на другой, чтобы создать толстое колесо.
- Поместите подшипник на колесо и закрепите его суперклеем.
- Сделайте два колеса с подшипниками и два без подшипников.
- Прикрепите колёса к машинке F1 и закрепите их суперклеем.
Шаг 6: Создаём электроуправление
- Используя плоскогубцы, закрепите оба провода как показано на картинке.
- Возьмите моторчик с шестерёнкой и прикрепите круглую картонку на его валу.
- Положите кусок толстого провода поверх картонки.
- Добавьте горячего клея и проложите проволоку между слоями картона.
- Прикрепите мотор к рулевому механизму и протестируйте его, чтобы убедиться, что он работает хорошо.
Заметка: Невозможно с помощью слов объяснить всё правильно, так что я рекомендую посмотреть видео и избежать возможных сомнений.
Шаг 7: Соединяем компоненты
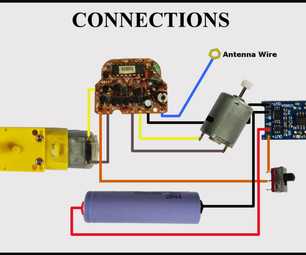
- Возьмите высокоскоростной мотор и закрепите маленькую пластиковую шестерёнку на его валу.
- Поместите моторчик на основе машинки и закрепите его горячим клеем, этот моторчик будет приводить в движение заднюю ось машинки.
- Поместите модуль TP4056 в заднюю часть машинки.
- Соедините выключатель с модулем зарядки.
- Достаньте схему приёмника из старой сломанной радиоуправляемой машинки, или сделайте свой по одной из схем, которые можно найти в интернете.
- Ссылаясь на приложенную выше схему, соедините вместе все компоненты.
Шаг 8: Создаём элементы кузова
- Сделайте переднее крыло из картона и прикрепите его к кузову суперклеем.
- Таким же образом сделайте и прикрепите заднее крыло.
- Завершите создание кузова, вырезав и приклеив нужные картонные части.
- Для изготовления кузова, ссылайтесь на приложенные картинки.
После завершения работ над кузовом, наша самодельная машинка на пульте управления готова. Подключите 5V зарядник, чтобы полностью зарядить аккумулятор. Возьмите пульт и приготовьтесь к весёлой части инструкции: видео.
masterclub.online
Как сделать радиоуправляемую машину в домашних условиях?
RC-модель своими руками – у многих эта фраза ассоциируется прежде всего с лобзиком по металлу, паяльником и прочими инструментами «хэндмэйдера». Сделать собственную модельку с абсолютного нуля – вытачивая каждую деталь самостоятельно – действительно можно, но это достаточно сложный, трудоёмкий и очень требовательный к собственным навыкам процесс. Поэтому сейчас мы будем говорить о более простом и доступном варианте: как собрать радиоуправляемую машину у себя дома.
Как это работает?
Современные модели на радиоуправлении можно разделить на две больших группы:
- RTR. Полностью готовые к использованию машинки, Ready to Run. То есть, достал модель из коробки, поставил аккумулятор – и вперёд, на гонки;
- Kit. Вариант поставки для продвинутых пользователей: вместо собранной машинки приходит набор запчастей, к которым Вы добавляете свои – кастомные – запчасти, собирая в итоге модель своей мечты самостоятельно.
Примечание: вариант, в котором Вы все запчасти покупаете отдельно, мало чем отличается от Kit-версии. Просто Вы не пользуетесь готовыми наборами, но, тем не менее, используете фабричные запчасти.
Зачем вообще нужна RC-модель своими руками? Ровно за тем же, что и любой кастом: чтобы выделиться в толпе, сделать свою машинку уникальной. Тем более, что сборка из готовых деталей менее требовательна к навыку, чем «работа напильником».
Какие запчасти понадобятся?
Как правило, если Вы выбрали какой-то Kit, то в его комплектацию входит только шасси и корпус. Дополнительно понадобятся (рассматриваем вариант с электрической машинкой):
- Двигатель;
- Радиоаппаратура: пульт управления, приёмник, телеметрия;
- Колёса;
- Аккумулятор;
- Диски, вставки и т. д.
В конечном итоге, всё зависит от конкретного набора для сборки радиоуправляемой модели машины своими руками: в некоторых, например, нет кузова, и он приобретается отдельно.
Сложно ли собрать Kit?
Именно на стадии сборки Kit’a сложностей обычно не возникает: детали пронумерованы, к ним в комплекте идёт подробная инструкция – делайте всё аккуратно, и проблем не будет. Трудности чаще всего возникают на объединении шасси с остальными комплектующими, поэтому ещё раз советуем: перед покупкой двигателя и прочих запчастей внимательно изучите выбранный Kit и его характеристики. Отличным выбором будет почитать тематические форумы: наверняка с этим Kit уже кто-то работал – и, скорее всего, этот кто-то охотно поделится опытом.
Пластик или алюминий?
Ответ на этот вопрос во многом зависит от того, о каком бренде идёт речь, но об этом ниже. Если сравнивать «в вакууме» – и хороший пластик с хорошим алюминием – картина выглядит примерно вот так:
- Пластик: легче, лучше гасит удар, восстанавливает форму после столкновений. Но, при этом, при слишком сильном ударе пластик трескается и рвётся, починить его будет практически нереально – деталь под замену. Кроме того, на пластиковых деталях со временем разбалтываются посадочные места валов и подшипников, из-за чего возникают люфты – снова приходится менять деталь;
- Алюминий. Поддаётся ремонту и практически не деформируется со временем, но хороший алюминий стоит дороже, чем хороший пластик. Плохой алюминий обычно довольно хрупкий и буквально рассыпается при том уровне нагрузок, который качественный пластик даже не заметит. А стоит примерно столько же.

Производители запчастей
Можно выделить три наиболее интересных бренда:
- RPM. Лучший пластик на рынке. Идеальное качество, высокая прочность, исключительная долговечность – то, что нужно, чтобы сделать своими руками неубиваемую rc-модель. Недостатков у бренда всего два: высокая цена и явная заточенность под американские машинки вроде TRAXXAS, на «китайца» запчасти RPM, скорее всего, не поставить;
- Integy. Алюминиевые детали, неплохой баланс между ценой и качеством. Если всё-таки предпочитаете металл пластику, вполне можно задуматься о выборе этого бренда. Ну и да: алюминий классно смотрится!
- Pro-Line. Ещё один отличный – и вполне универсальный – бренд. Оптимальный выбор, если собираетесь работать не с американскими Kit. Среди достоинств марки: 5 лет на рынке, куча наград, очень широкий ассортимент и приемлемая ценовая политика.

Общие выводы по машинкам на управлении своими руками
Если аккуратно следовать инструкции и не торопиться, в самостоятельной сборке RC-модели нет ничего запредельно сложного. Главное – это использовать качественные комплектующие от известного бренда, они встают на свои места беспроблемно. Ну и рекомендуем начинать с Kit’a попроще, а потом уже, получив первый опыт, задирать планку кастома.
gevis.ru